Re: Navigate to a point outside graph
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873p877.html
I repeated the test setting a goal that is about 1.5 meters far from the graph and leaving "RGBD/GoalReachedRadius" to 0.5 meters, this is what happens:
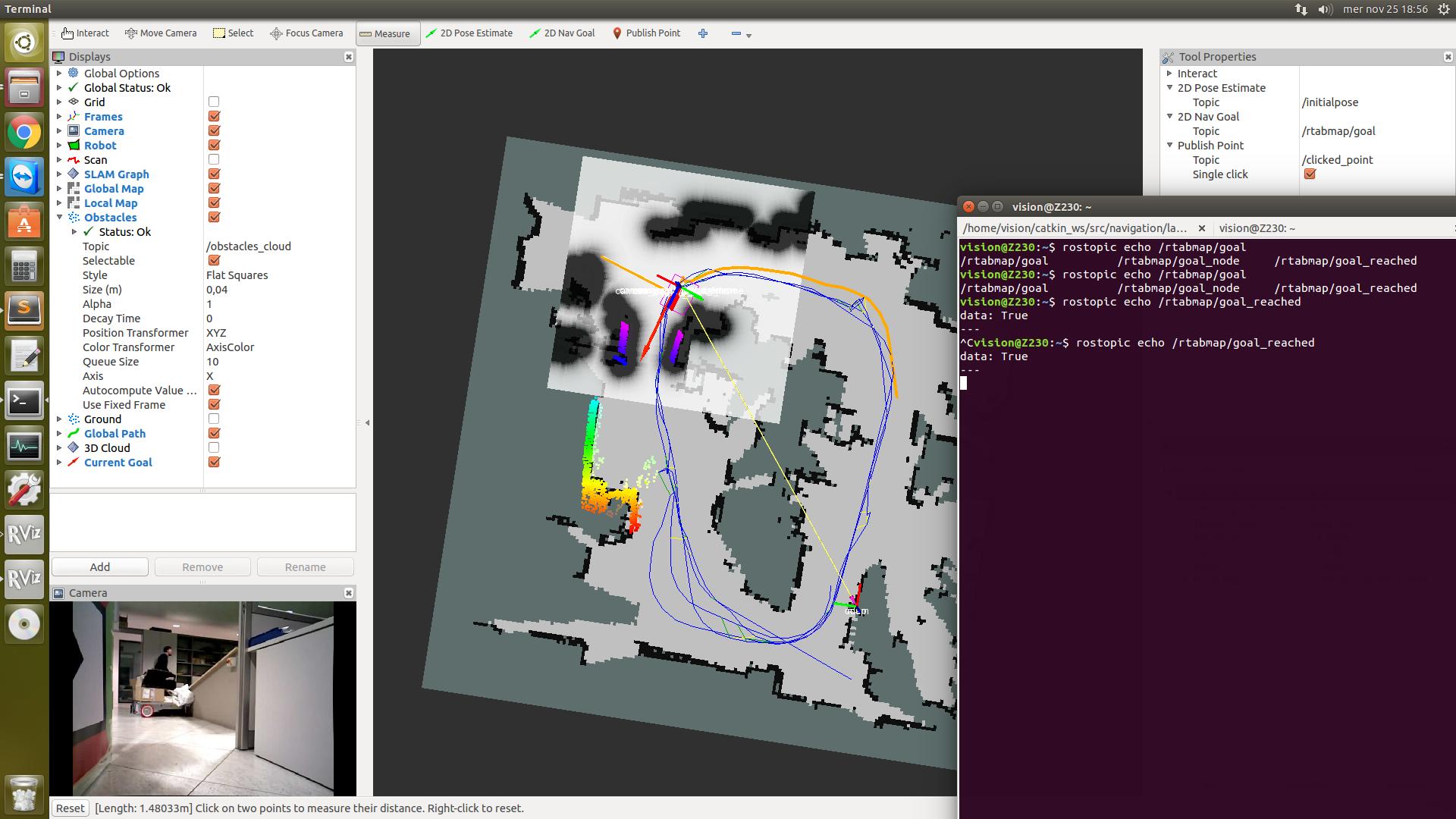
On the prompt, you can see that rtabmap states that the goal is reached. Inside RViz you can see the orange global path that is correctly computed from the start position to the provided goal, but in the bottom left corner you can see the actual distance from the robot to the goal (1.48 meters). The red arrow is the current move_base goal pose that is (correctly) reached, but it is not what I have set (the end of the orange path).
In this situation, it seems that the robot cannot reach the target because of obstacles in the local map, but this behaviour also happens when the path to the distant goal is totally free as I showed you the previous screenshot.
Do you have any idea?
What is the practical difference between "RGBD/GoalReachedRadius" and "RGBD/LocalRadius"?
Thanks,
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873p877.html
I repeated the test setting a goal that is about 1.5 meters far from the graph and leaving "RGBD/GoalReachedRadius" to 0.5 meters, this is what happens:
On the prompt, you can see that rtabmap states that the goal is reached. Inside RViz you can see the orange global path that is correctly computed from the start position to the provided goal, but in the bottom left corner you can see the actual distance from the robot to the goal (1.48 meters). The red arrow is the current move_base goal pose that is (correctly) reached, but it is not what I have set (the end of the orange path).
In this situation, it seems that the robot cannot reach the target because of obstacles in the local map, but this behaviour also happens when the path to the distant goal is totally free as I showed you the previous screenshot.
Do you have any idea?
What is the practical difference between "RGBD/GoalReachedRadius" and "RGBD/LocalRadius"?
Thanks,
~Guido
| Free forum by Nabble | Edit this page |