Re: Navigate to a point outside graph
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873p879.html
Follow-up...
I've found the problem. It happens only in localization mode. In mapping mode, you should have something like this:
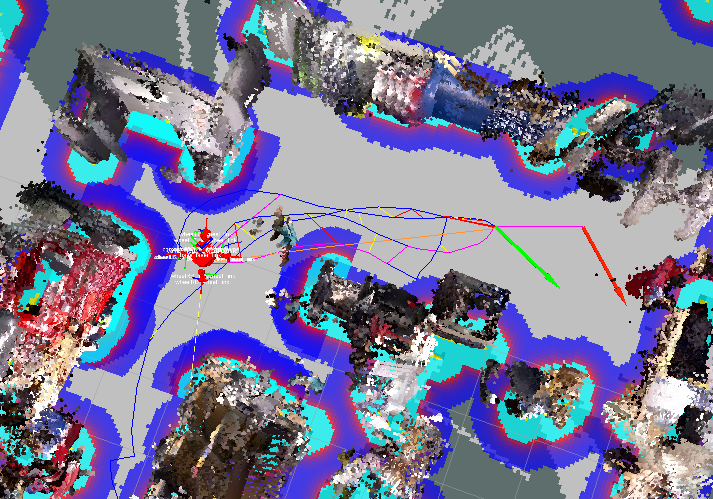
1- Set goal (the red arrow), rtabmap plans the purple path, move_base plans the orange path to the current pose (green arrow) set by rtabmap (which is the last pose on the graph):
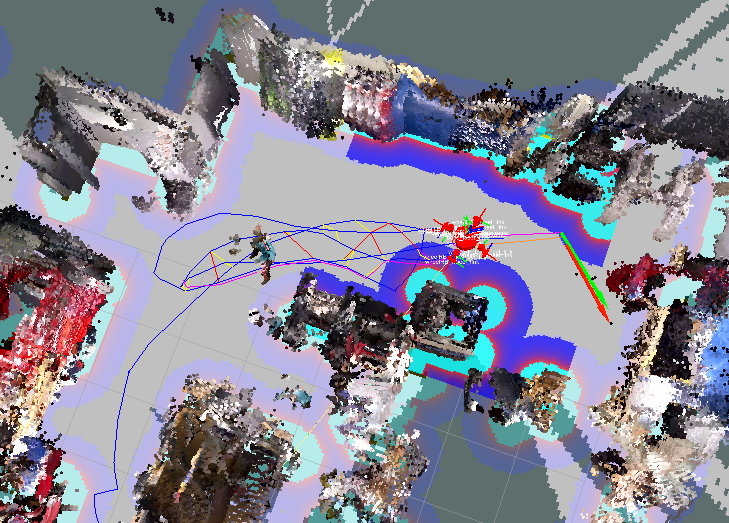
2- The robot reaches the previous green arrow, then the next pose (new green arrow) is sent on the requested pose (the goal):
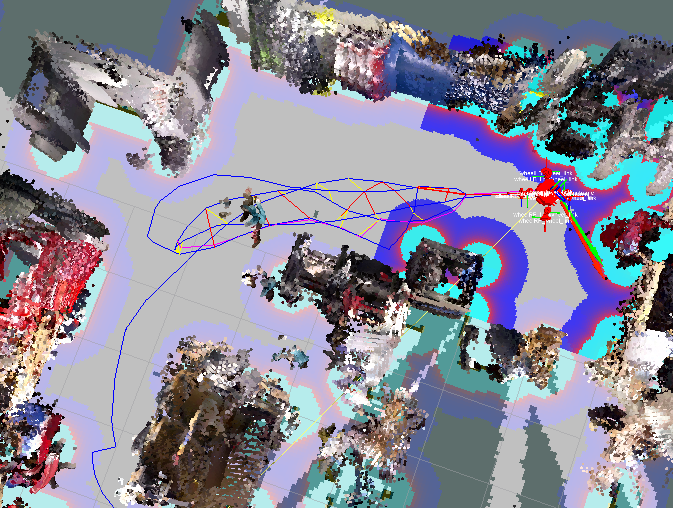
3- As soon as the robot enters in the goal radius, rtabmap sends "/rtabmap/goal_reached", and move_base continues to sends velocity commands until the robot is oriented on the goal set:
I've fixed the problem for localization mode, the results above should be reproducible in localization mode too. Thx for your feedback to find this bug!
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873p879.html
Follow-up...
I've found the problem. It happens only in localization mode. In mapping mode, you should have something like this:
1- Set goal (the red arrow), rtabmap plans the purple path, move_base plans the orange path to the current pose (green arrow) set by rtabmap (which is the last pose on the graph):
2- The robot reaches the previous green arrow, then the next pose (new green arrow) is sent on the requested pose (the goal):
3- As soon as the robot enters in the goal radius, rtabmap sends "/rtabmap/goal_reached", and move_base continues to sends velocity commands until the robot is oriented on the goal set:
I've fixed the problem for localization mode, the results above should be reproducible in localization mode too. Thx for your feedback to find this bug!
cheers,
Mathieu
| Free forum by Nabble | Edit this page |