Re: About rtabmap with jetson agx xavier
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/About-rtabmap-with-jetson-agx-xavier-tp8779p8833.html
Hi,
RTAB-Map is a graph-SLAM like Google Cartographer, SLAM toolbox, ORB_SLAM...
It can be used offline or online, depending on the application. We have CLI tools to process a bunch of data offline. With ROS, you can do online SLAM. In this paper, we did continuous SLAM online during 8 hours. By interpolating the results and avoiding saving all debugging data, the robot could have done SLAM online during 800 hours (33 days) with a hard drive of 100 GB. With graph reduction enabled, it could have done SLAM online continuously over 130 days. It is really a matter on how we configure RTAB-Map and which sensors are used. By default, it keeps all data for debugging purpose, which is easier for a new user to get its hands on.
Graph-SLAM can be split into 3 main modules: odometry, loop closure detection and graph optimization. rtabmap node does the 2 later. See figure 1 of this paper:
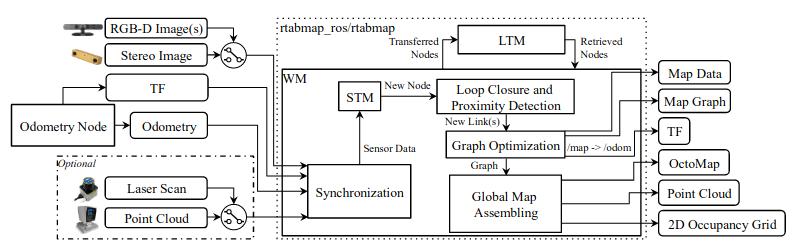
Loop closure detection is done by a Bayes Filter, with likelihood computed by BOW approach. Graph optimization is done by either of these approaches (selected by Optimizer/Strategy parameter): OptimizerG2O, OptimizerGTSAM, OptimizerTORO or OptimizerCeres, see https://github.com/introlab/rtabmap/tree/master/corelib/src/optimizer
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/About-rtabmap-with-jetson-agx-xavier-tp8779p8833.html
Hi,
RTAB-Map is a graph-SLAM like Google Cartographer, SLAM toolbox, ORB_SLAM...
It can be used offline or online, depending on the application. We have CLI tools to process a bunch of data offline. With ROS, you can do online SLAM. In this paper, we did continuous SLAM online during 8 hours. By interpolating the results and avoiding saving all debugging data, the robot could have done SLAM online during 800 hours (33 days) with a hard drive of 100 GB. With graph reduction enabled, it could have done SLAM online continuously over 130 days. It is really a matter on how we configure RTAB-Map and which sensors are used. By default, it keeps all data for debugging purpose, which is easier for a new user to get its hands on.
Graph-SLAM can be split into 3 main modules: odometry, loop closure detection and graph optimization. rtabmap node does the 2 later. See figure 1 of this paper:
Loop closure detection is done by a Bayes Filter, with likelihood computed by BOW approach. Graph optimization is done by either of these approaches (selected by Optimizer/Strategy parameter): OptimizerG2O, OptimizerGTSAM, OptimizerTORO or OptimizerCeres, see https://github.com/introlab/rtabmap/tree/master/corelib/src/optimizer
cheers,
Mathieu
| Free forum by Nabble | Edit this page |