using icp and visual odometry at the same time!
Posted by Masoumeh on
URL: http://official-rtab-map-forum.206.s1.nabble.com/using-icp-and-visual-odometry-at-the-same-time-tp8854.html
hi mattieu,
I am using demo-husky and rtabmap.launch files for my robot (my robot is warthog).
I have activated visual odometry, but in rviz i can see that even the vehicle is in one location, the map starts drifting:
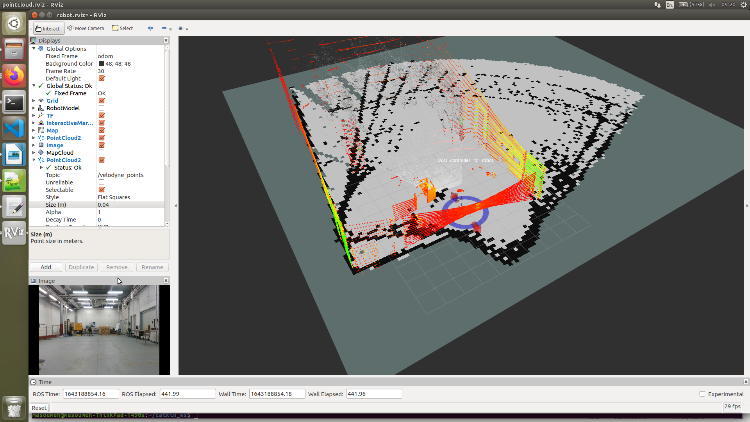
Now, i want to activate icp, as well. but accoriding to the setting which have been defined in rtabmap.launch file. if icp-odometry is false, it will starts checking for visual odometry: https://github.com/introlab/rtabmap_ros/blob/master/launch/rtabmap.launch
<group unless="$(arg icp_odometry)">
<group if="$(arg visual_odometry)">
so how can i have both of them at the same time, and besynched with each other as well.
the frequency rate of 3D lidar is 10, and the freq rate of my rgbd is about 30 hz.
thanks
URL: http://official-rtab-map-forum.206.s1.nabble.com/using-icp-and-visual-odometry-at-the-same-time-tp8854.html
hi mattieu,
I am using demo-husky and rtabmap.launch files for my robot (my robot is warthog).
I have activated visual odometry, but in rviz i can see that even the vehicle is in one location, the map starts drifting:
Now, i want to activate icp, as well. but accoriding to the setting which have been defined in rtabmap.launch file. if icp-odometry is false, it will starts checking for visual odometry: https://github.com/introlab/rtabmap_ros/blob/master/launch/rtabmap.launch
<group unless="$(arg icp_odometry)">
<group if="$(arg visual_odometry)">
so how can i have both of them at the same time, and besynched with each other as well.
the frequency rate of 3D lidar is 10, and the freq rate of my rgbd is about 30 hz.
thanks
| Free forum by Nabble | Edit this page |