Re: About Visual slam with lidar
Posted by plaid on
URL: http://official-rtab-map-forum.206.s1.nabble.com/About-Visual-slam-with-lidar-tp8798p8874.html
(1) Does that mean you want to run this command?
"roslaunch () () --rtabmap_args:=--udebag "
(2) Thanks
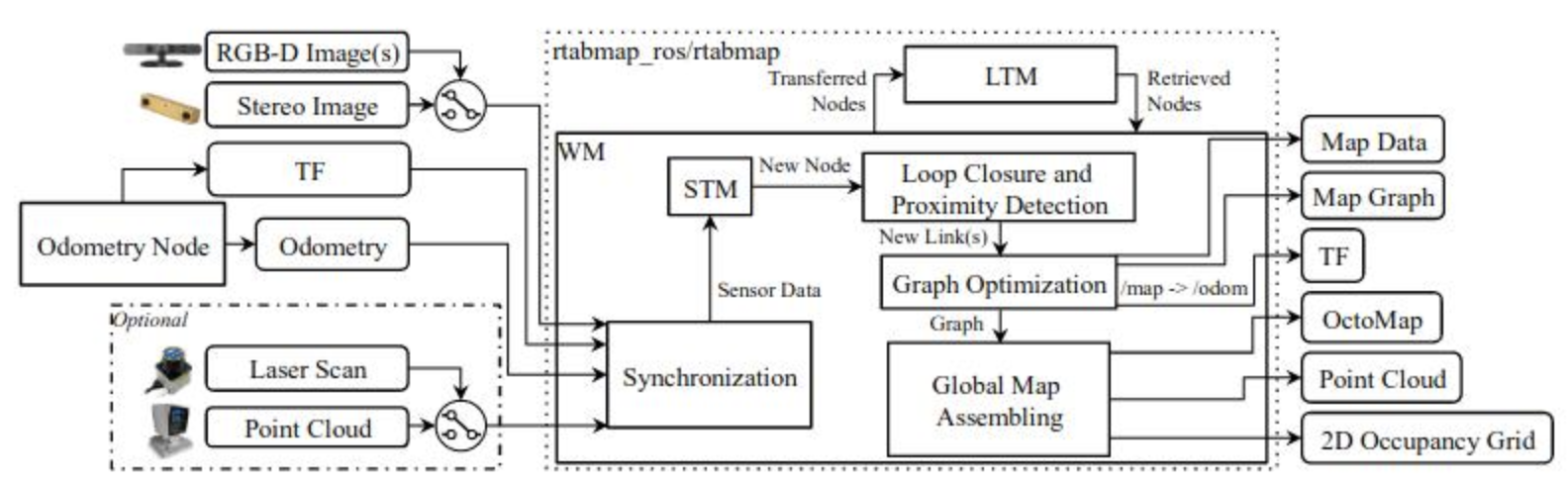
Is there a more detailed flowchart etc. than this picture? This is the input of the sensor used for mapping, the input of the sensor used for loop closer, etc.
URL: http://official-rtab-map-forum.206.s1.nabble.com/About-Visual-slam-with-lidar-tp8798p8874.html
(1) Does that mean you want to run this command?
"roslaunch () () --rtabmap_args:=--udebag "
(2) Thanks
Is there a more detailed flowchart etc. than this picture? This is the input of the sensor used for mapping, the input of the sensor used for loop closer, etc.
| Free forum by Nabble | Edit this page |