Re: 3D-map is so bad
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-map-is-so-bad-tp8867p8884.html
Standing still on a flat surface, if imu is not upside-down, linear acceleration z would show +9.8.
approx_sync should be true if not using icp/visual odometry and if not using both camera and lidar at the same time.
The demo launch file wasn't not meant to do visual odometry. You have to set true this line and false this line, while using icp_odometry argument=true of the launch file to enabled stuff related to odometry computed on rtabmap side (tested with modified rosbag as above):
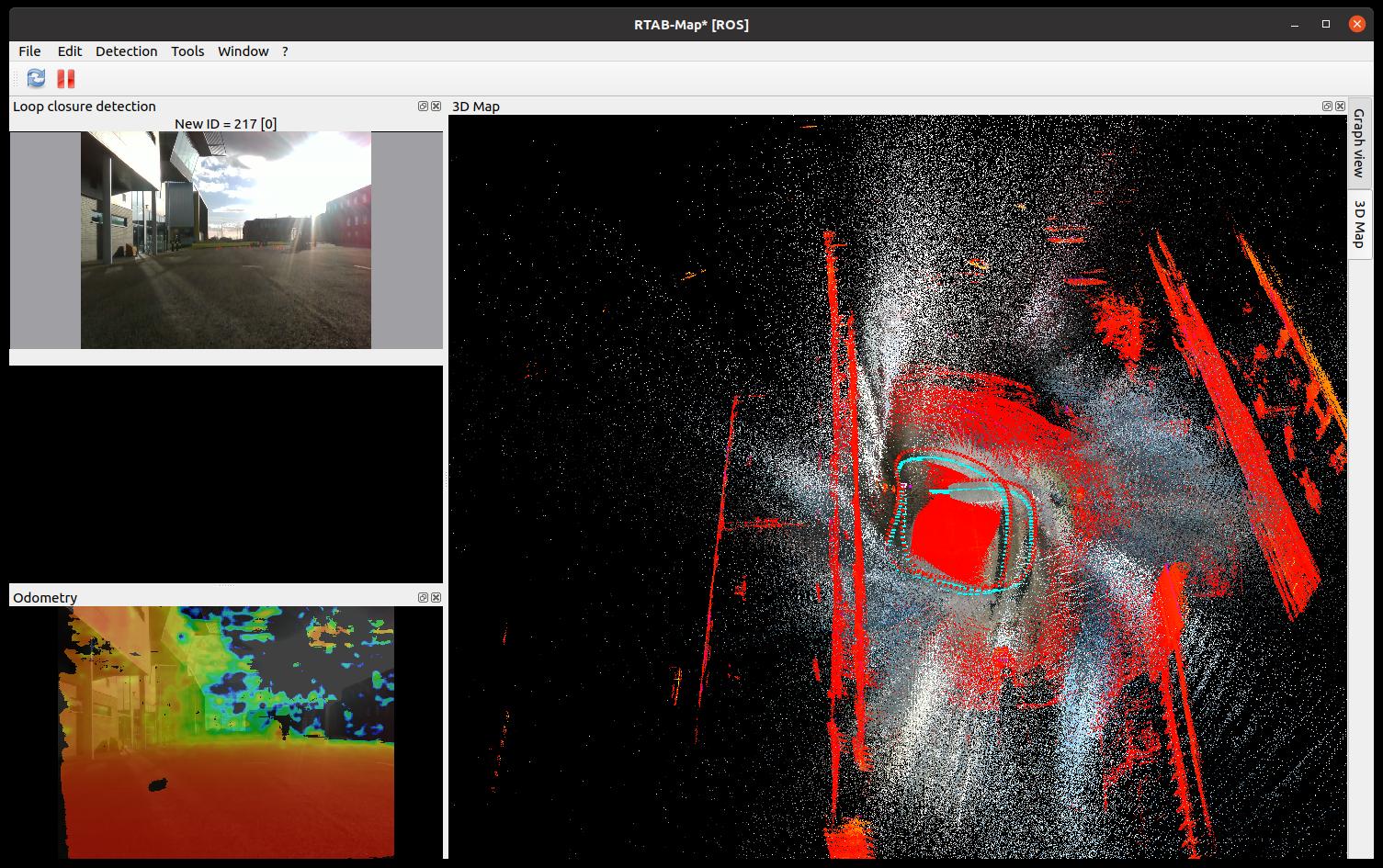
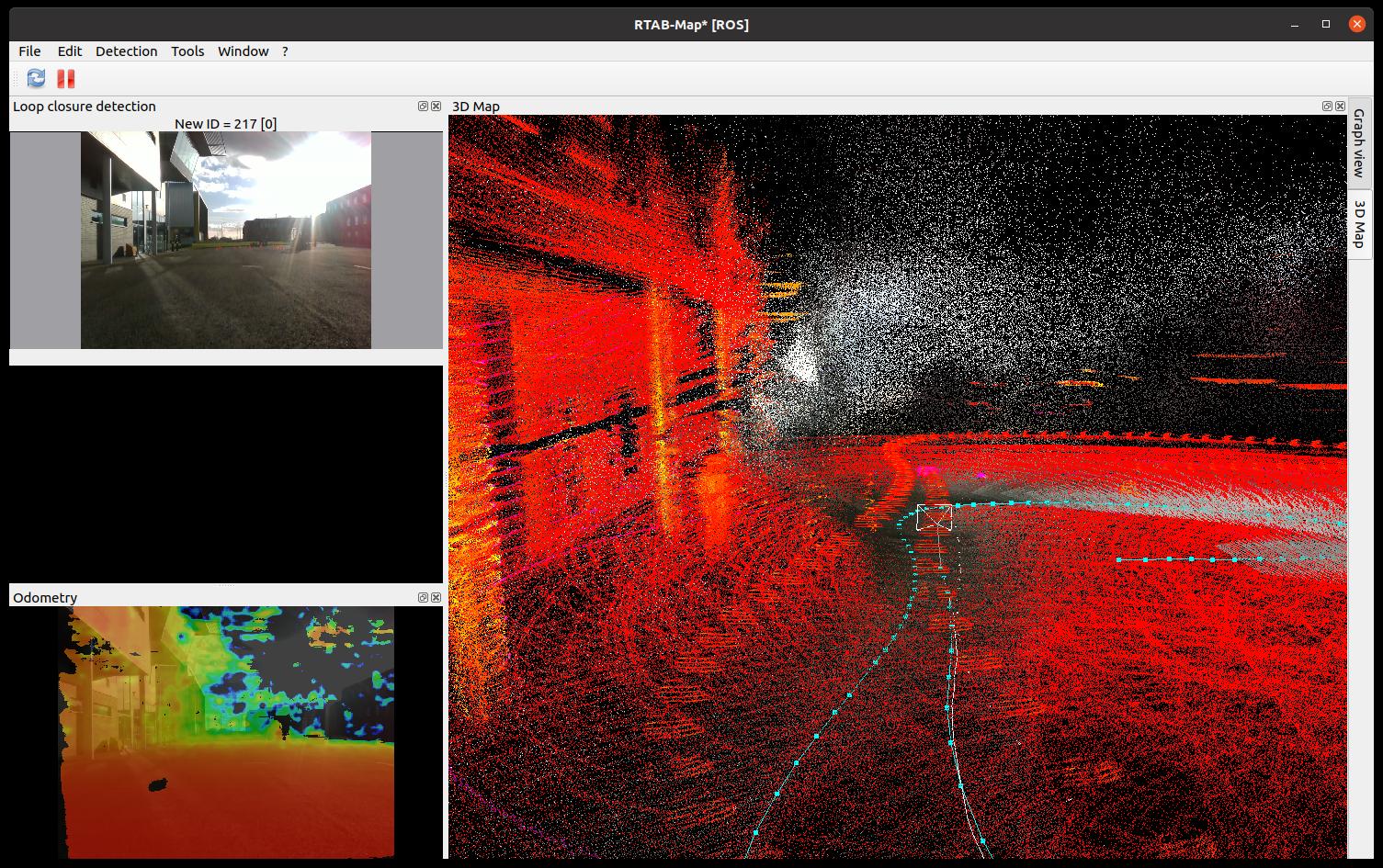
I don't recommend using the RGB-D point cloud from that camera, it is very noisy, even the sky has [wrong] depth! What is the baseline of that camera? For outdoor in large space like that, a higher stereo baseline would be required, or have better disparity estimation than that. It is however fine for visual loop closure detection.
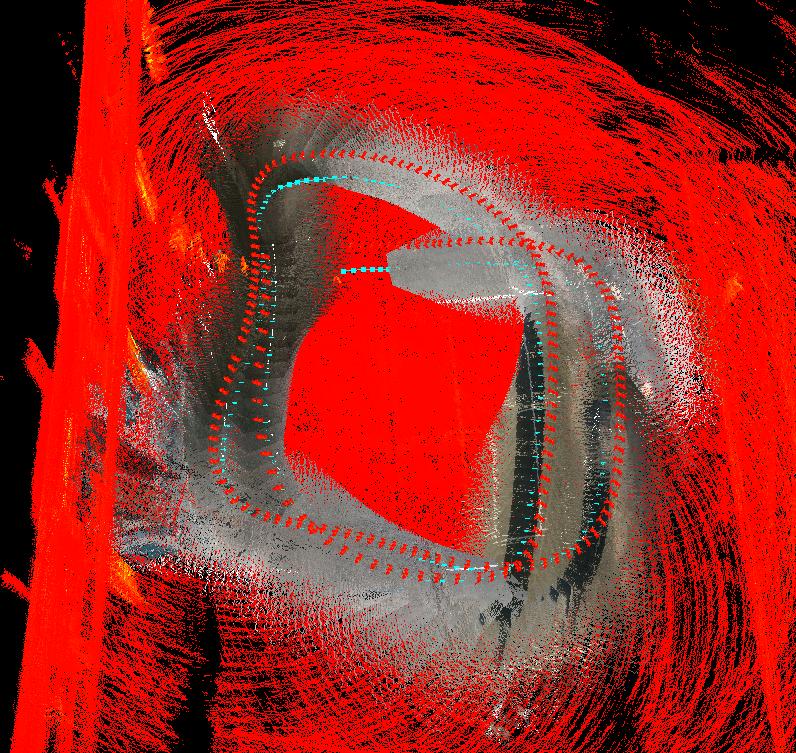
Here is if I limit the depth of the camera to 5 meters (less noisy but range is small):
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-map-is-so-bad-tp8867p8884.html
Standing still on a flat surface, if imu is not upside-down, linear acceleration z would show +9.8.
approx_sync should be true if not using icp/visual odometry and if not using both camera and lidar at the same time.
The demo launch file wasn't not meant to do visual odometry. You have to set true this line and false this line, while using icp_odometry argument=true of the launch file to enabled stuff related to odometry computed on rtabmap side (tested with modified rosbag as above):
roscore rosparam set use_sim_time true roslaunch robot_localization.launch roslaunch rtabmap_ros demo_husky.launch lidar3d:=true camera:=true rtabmapviz:=true icp_odometry:=true rosbag play --clock --pause lab_27jan_2022-01-27-14-21-13.bag \ /odometry/filtered:=not_used \ /camera/color/camera_info:=/realsense/color/camera_info \ /camera/color/image_raw:=/realsense/color/image_raw \ /camera/depth/image_rect_raw:=/realsense/depth/image_rect_raw
I don't recommend using the RGB-D point cloud from that camera, it is very noisy, even the sky has [wrong] depth! What is the baseline of that camera? For outdoor in large space like that, a higher stereo baseline would be required, or have better disparity estimation than that. It is however fine for visual loop closure detection.
Here is if I limit the depth of the camera to 5 meters (less noisy but range is small):
| Free forum by Nabble | Edit this page |