Re: How to use rtabmap-odometryViewer?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-odometryViewer-tp8894p8900.html
Hi,
This is an old tool (experimental) and that wiki page didn't follow the major changes in this commit in 2016, where the more general rtabmap's parameters usage from the command line replaced all the individual options to be more general and follow rtabmap's changes over time.
To see all parameters, you can do --params option. For example, you can change the feature type and max features used with:
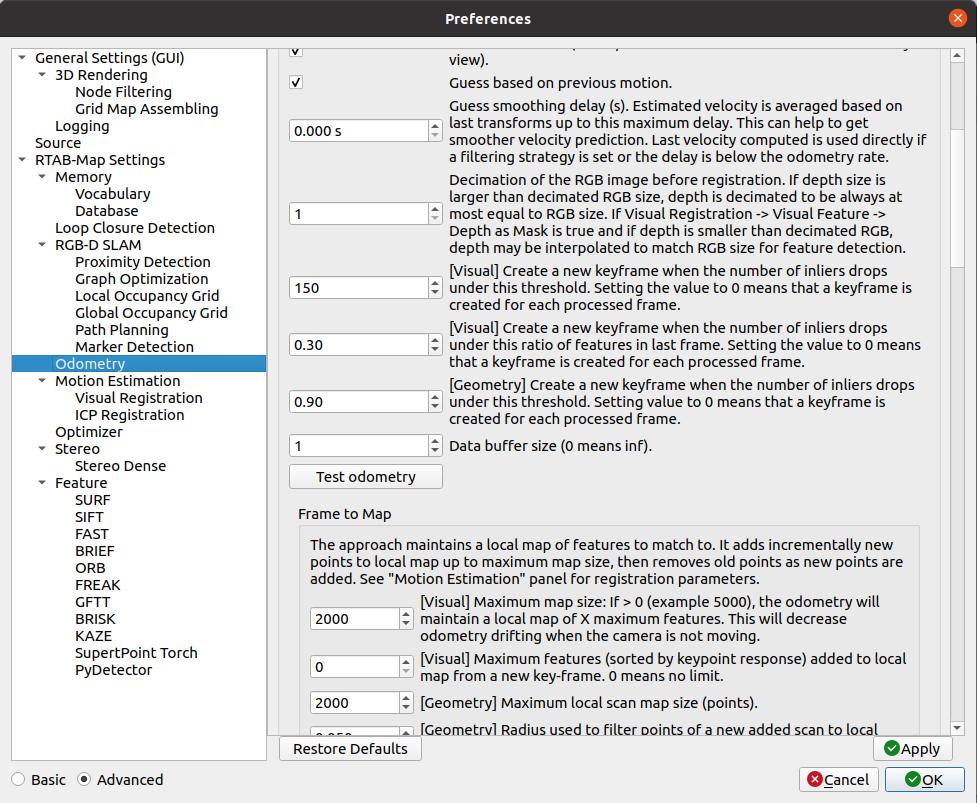
It is maybe more convenient to use "Test odometry" button under Preferences->Odometry as explained in the description and change the parameters from the UI. That way we can easily use all available sensors and modify all parameters.
With "Test odometry", you will see similar colors. Red for outliers, green for inliers and yellow for features not matched.
First time I noticed the Discussions section on Github, thx for pointing that. That seems to have similar functionalities than this forum. I'll check it in more details.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-odometryViewer-tp8894p8900.html
Hi,
This is an old tool (experimental) and that wiki page didn't follow the major changes in this commit in 2016, where the more general rtabmap's parameters usage from the command line replaced all the individual options to be more general and follow rtabmap's changes over time.
$ rtabmap-odometryViewer --help
Usage:
odometryViewer [options]
Options:
-driver # Driver number to use:
0=OpenNI-PCL (Kinect)
1=OpenNI2 (Kinect and Xtion PRO Live)
2=Freenect (Kinect)
3=OpenNI-CV (Kinect)
4=OpenNI-CV-ASUS (Xtion PRO Live)
5=Freenect2 (Kinect v2)
6=DC1394 (Bumblebee2)
7=FlyCapture2 (Bumblebee2)
8=ZED stereo
9=RealSense
10=Kinect for Windows 2 SDK
11=RealSense2
12=Kinect for Azure SDK
13=MYNT EYE S
-hz #.# Camera rate (default 0, 0 means as fast as the camera can)
-db "input.db" Use database instead of camera (recorded with rtabmap-dataRecorder)
-clouds # Maximum clouds shown (default 10, zero means inf)
-sec #.# Delay (seconds) before reading the database (if set)
RTAB-Map options:
--help Show usage.
--version Show version of rtabmap and its dependencies.
--params Show all parameters with their default value and description.
If a database path is set as last argument, the parameters in the
database will be shown in INI format.
--"parameter name" "value" Overwrite a specific RTAB-Map's parameter :
--SURF/HessianThreshold 150
For parameters in table format, add ',' between values :
--Kp/RoiRatios 0,0,0.1,0
Logger options:
--nolog Disable logger
--logconsole Set logger console type
--logfile "path" Set logger file type
--logfilea "path" Set logger file type with appending mode if the file already exists
--udebug Set logger level to debug
--uinfo Set logger level to info
--uwarn Set logger level to warn
--uerror Set logger level to error
--logtime "bool" Print time when logging
--logwhere "bool" Print where when logging
--logthread "bool" Print thread id when logging
To see all parameters, you can do --params option. For example, you can change the feature type and max features used with:
rtabmap-odometryViewer --Vis/FeatureType 11 --Vis/MaxFeatures 500 ...
It is maybe more convenient to use "Test odometry" button under Preferences->Odometry as explained in the description and change the parameters from the UI. That way we can easily use all available sensors and modify all parameters.
With "Test odometry", you will see similar colors. Red for outliers, green for inliers and yellow for features not matched.
First time I noticed the Discussions section on Github, thx for pointing that. That seems to have similar functionalities than this forum. I'll check it in more details.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |