RTABMAP to be integrated for two ZED2i cameras
Posted by shruthi on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-to-be-integrated-for-two-ZED2i-cameras-tp8976.html
Hi,
I have 2 doubts:
1. i have 2 ros packages : rtabmap_ros from https://github.com/introlab/rtabmap_ros and zed_rtabmap_examples ros package from https://github.com/stereolabs/zed-ros-examples/tree/master/examples
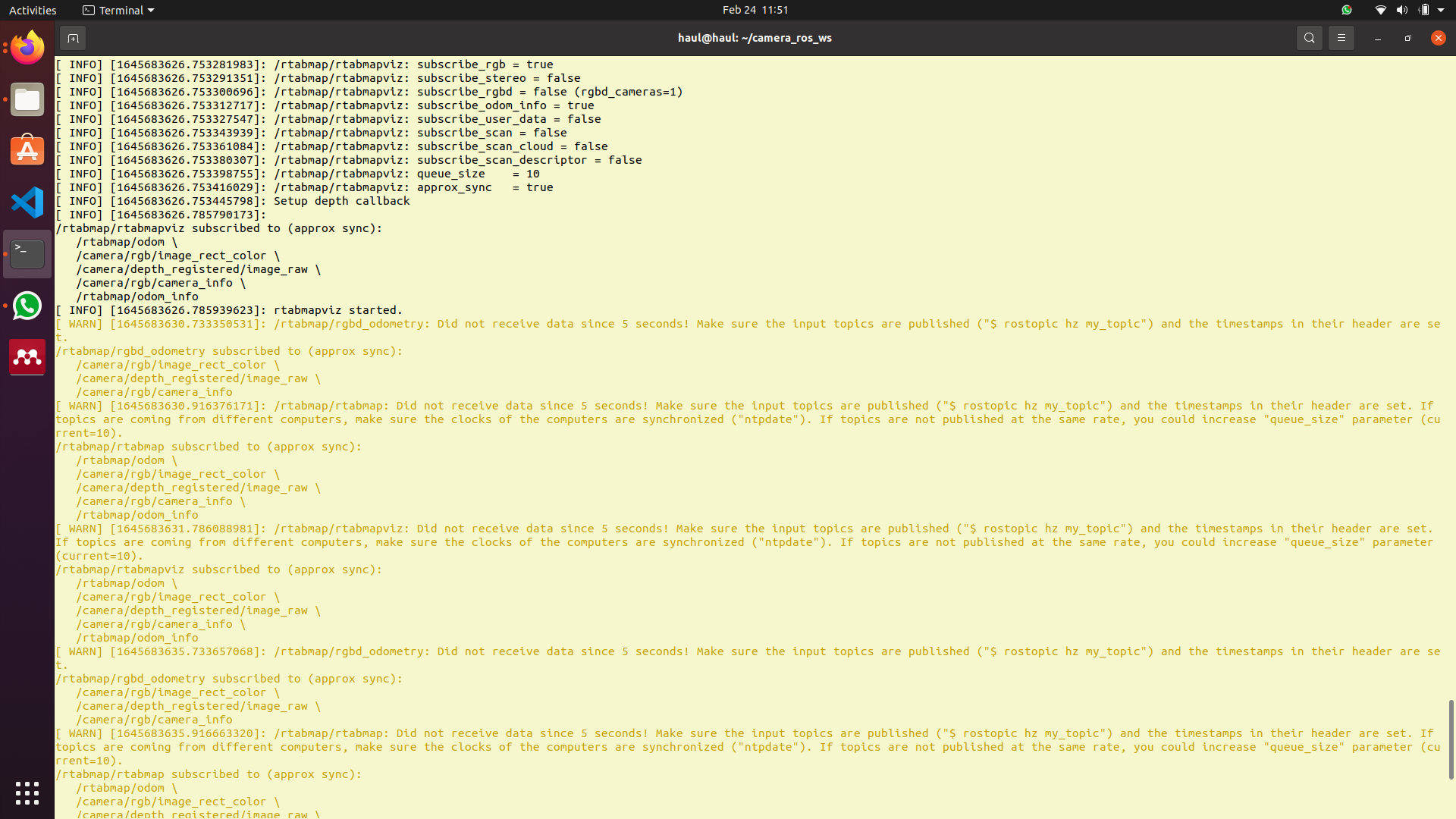
When i use rtabmap_ros package and launch the file roslaunch rtabmap_ros rtabmap.launch
Output in terminal is: Did not receive data since 5 seconds!
but when i use zed_rtabmap_exapmle package and launch using roslaunch zed_rtabmap_example zed_rtabmap.launch
I get the output correctly. I am able to map and .dbfile is saved.
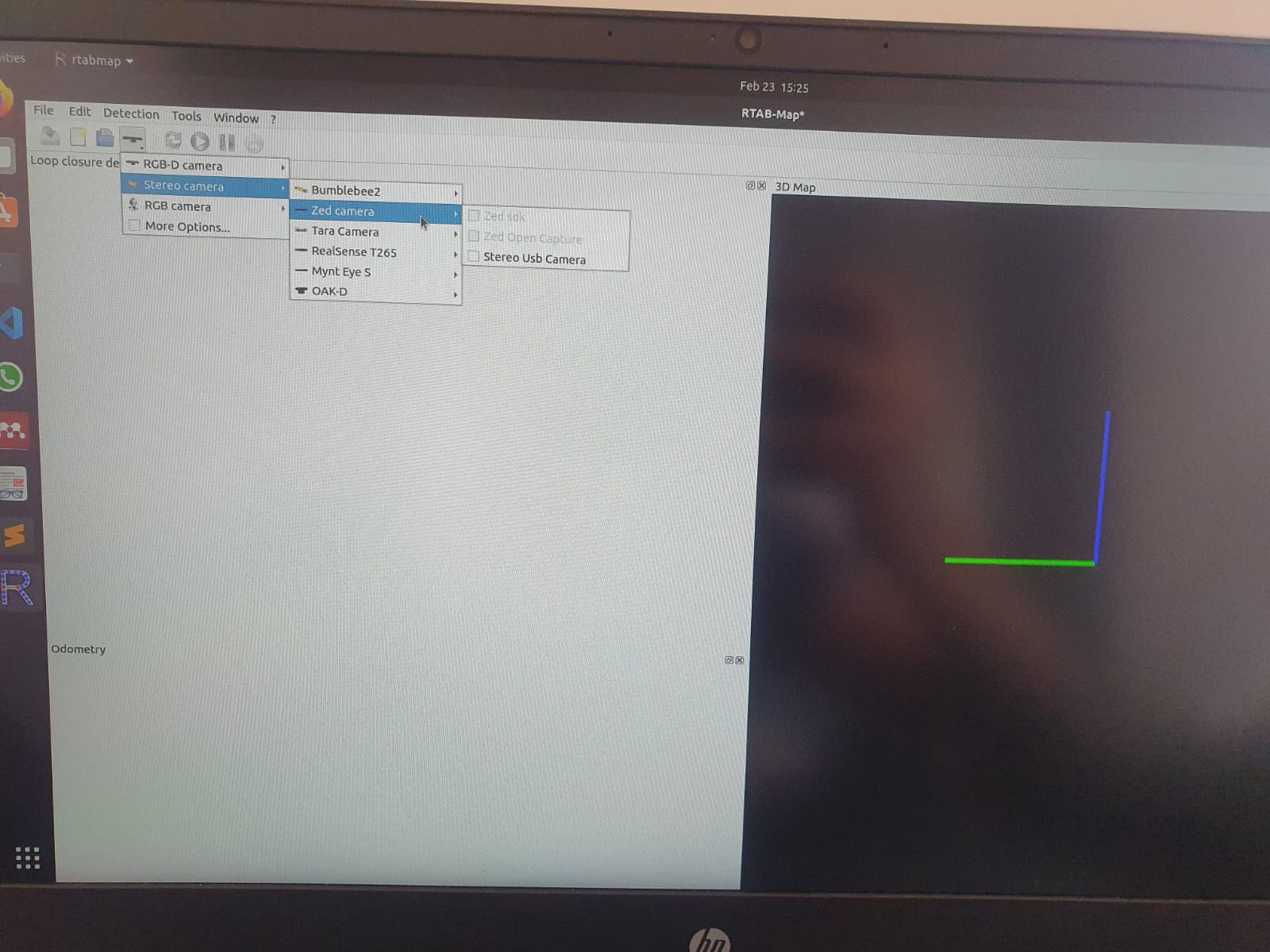
2. when in terminal i directly use rtabmap -> and use the above .db file. i am unable to select the zed camera checkbox "ZED sdk" , i selected the stereo usb camera and click on start :
RTAB-Map in metric SLAM mode cannot run with an uncalibrated camera. Do you want to calibrate the camera now? or i get camera intialisation failed.
3. Can u please guide me how to use multiple zed 2i camera for rtabmap for slam.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-to-be-integrated-for-two-ZED2i-cameras-tp8976.html
Hi,
I have 2 doubts:
1. i have 2 ros packages : rtabmap_ros from https://github.com/introlab/rtabmap_ros and zed_rtabmap_examples ros package from https://github.com/stereolabs/zed-ros-examples/tree/master/examples
When i use rtabmap_ros package and launch the file roslaunch rtabmap_ros rtabmap.launch
Output in terminal is: Did not receive data since 5 seconds!
but when i use zed_rtabmap_exapmle package and launch using roslaunch zed_rtabmap_example zed_rtabmap.launch
I get the output correctly. I am able to map and .dbfile is saved.
2. when in terminal i directly use rtabmap -> and use the above .db file. i am unable to select the zed camera checkbox "ZED sdk" , i selected the stereo usb camera and click on start :
RTAB-Map in metric SLAM mode cannot run with an uncalibrated camera. Do you want to calibrate the camera now? or i get camera intialisation failed.
3. Can u please guide me how to use multiple zed 2i camera for rtabmap for slam.
| Free forum by Nabble | Edit this page |