Re: Ouster launch failing
Posted by denzle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Ouster-launch-failing-tp9109p9115.html
Thanks for your reply Mathieu,
So i have managed to get some connection between the sensor and Rtab-ros. In rtabviz i can see a sparse point cloud but when i come to close the session nothing gets saved. I've tried to rectify any errors that i can find during start up or during the session but it seems as though assembler doesn't want to work now adn i'm recieving a fatal error with message conversion.
Running the rostopic publisher i get no messages returned. I have checked what may have changed but can't seem to find anything.
$rostopic hz /os_cloud_node/imu/data
subscribed to [/os_cloud_node/imu/data]
no new messages
no new messages
no new messages
no new messages
[FATAL] (2022-06-12 17:25:10.054) MsgConversion.cpp:2286::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2022-06-12 17:25:10.054) MsgConversion.cpp:2286::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
[ INFO] [1655051110.060511093]: Odom: ratio=0.967202, std dev=0.005441m|0.001720rad, update time=0.009347s
[ INFO] [1655051110.108666188]: Odom: ratio=0.959198, std dev=0.005340m|0.001689rad, update time=0.010132s
[rtabmap/rtabmap-5] process has died [pid 29390, exit code -6, cmd /home/dan/catkin_ws/devel/lib/rtabmap_ros/rtabmap -d scan_cloud:=assembled_cloud imu:=/os_cloud_node/imu/data __name:=rtabmap __log:=/home/dan/.ros/log/2e256bce-ea6c-11ec-90f4-79224fe1d2ac/rtabmap-rtabmap-5.log].
log file: /home/dan/.ros/log/2e256bce-ea6c-11ec-90f4-79224fe1d2ac/rtabmap-rtabmap-5*.log
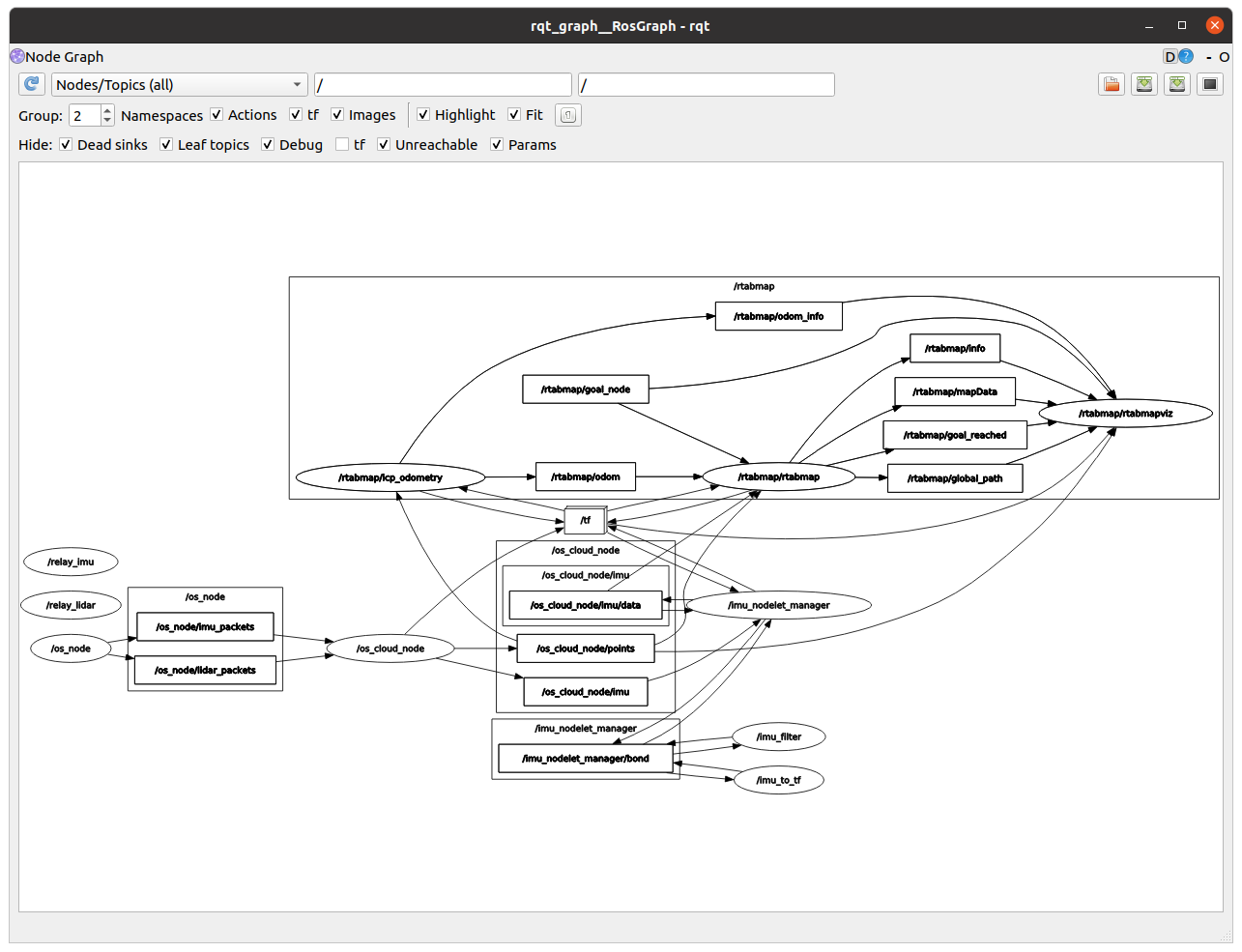
I've attached the TF tree and RQT Graph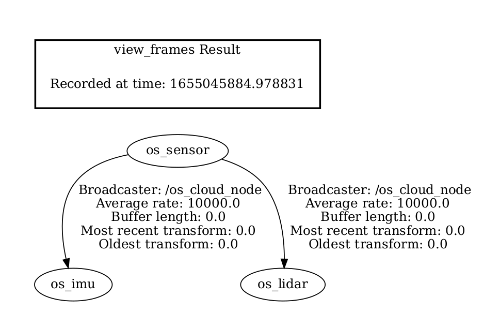
regards
Dan
URL: http://official-rtab-map-forum.206.s1.nabble.com/Ouster-launch-failing-tp9109p9115.html
Thanks for your reply Mathieu,
So i have managed to get some connection between the sensor and Rtab-ros. In rtabviz i can see a sparse point cloud but when i come to close the session nothing gets saved. I've tried to rectify any errors that i can find during start up or during the session but it seems as though assembler doesn't want to work now adn i'm recieving a fatal error with message conversion.
Running the rostopic publisher i get no messages returned. I have checked what may have changed but can't seem to find anything.
$rostopic hz /os_cloud_node/imu/data
subscribed to [/os_cloud_node/imu/data]
no new messages
no new messages
no new messages
no new messages
[FATAL] (2022-06-12 17:25:10.054) MsgConversion.cpp:2286::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2022-06-12 17:25:10.054) MsgConversion.cpp:2286::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
[ INFO] [1655051110.060511093]: Odom: ratio=0.967202, std dev=0.005441m|0.001720rad, update time=0.009347s
[ INFO] [1655051110.108666188]: Odom: ratio=0.959198, std dev=0.005340m|0.001689rad, update time=0.010132s
[rtabmap/rtabmap-5] process has died [pid 29390, exit code -6, cmd /home/dan/catkin_ws/devel/lib/rtabmap_ros/rtabmap -d scan_cloud:=assembled_cloud imu:=/os_cloud_node/imu/data __name:=rtabmap __log:=/home/dan/.ros/log/2e256bce-ea6c-11ec-90f4-79224fe1d2ac/rtabmap-rtabmap-5.log].
log file: /home/dan/.ros/log/2e256bce-ea6c-11ec-90f4-79224fe1d2ac/rtabmap-rtabmap-5*.log
I've attached the TF tree and RQT Graph
regards
Dan
| Free forum by Nabble | Edit this page |