Error generating Odometry Data - KITTI Dataset Sequence 00
Posted by Divyansh on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-generating-Odometry-Data-KITTI-Dataset-Sequence-00-tp9217.html
I am trying to get to run RTABMAP with KITTI dataset, following the roslaunch command and altering few parameters as discussed in these 2 posts:
https://answers.ros.org/question/330157/large-kitti-data-mapor-loopclosure-make-rtabmap_ros-and-the-whole-ubuntu-crash/
https://answers.ros.org/questions/330157/revisions/
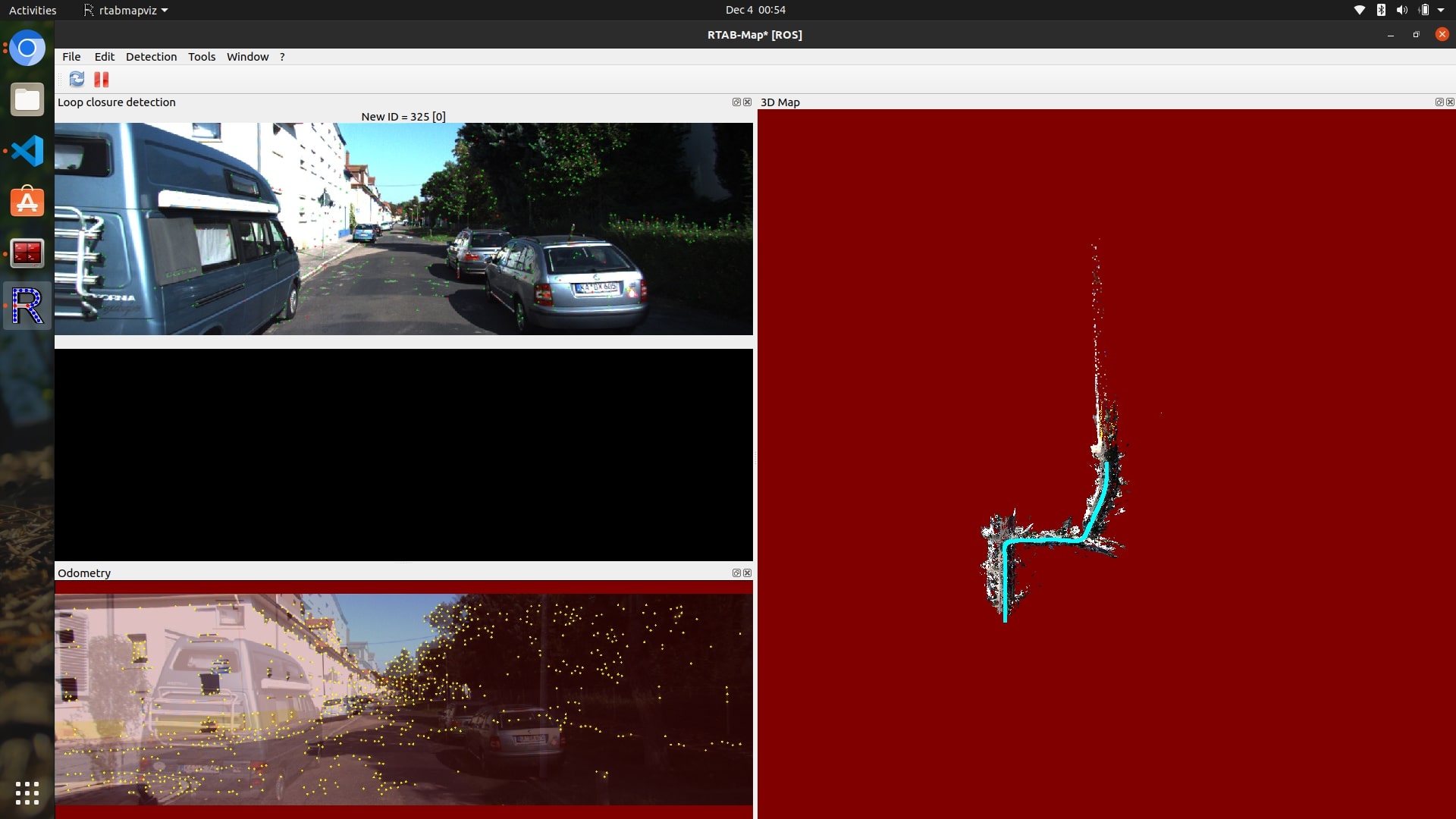
I am getting an error in generating Odometry after `35 seconds, how can I resolve this? I also tried playing around with few other parameters for RTAB_Settings and Visual Registration in RTABMAB->Preferences, but still same error.
Not enough inliers found;
OdometryF2M.cpp:557::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=63) between -1 and 351"
Any suggestion on what individual parameters I should tweek with. Thanks.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-generating-Odometry-Data-KITTI-Dataset-Sequence-00-tp9217.html
I am trying to get to run RTABMAP with KITTI dataset, following the roslaunch command and altering few parameters as discussed in these 2 posts:
https://answers.ros.org/question/330157/large-kitti-data-mapor-loopclosure-make-rtabmap_ros-and-the-whole-ubuntu-crash/
https://answers.ros.org/questions/330157/revisions/
I am getting an error in generating Odometry after `35 seconds, how can I resolve this? I also tried playing around with few other parameters for RTAB_Settings and Visual Registration in RTABMAB->Preferences, but still same error.
Not enough inliers found;
OdometryF2M.cpp:557::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=63) between -1 and 351"
Any suggestion on what individual parameters I should tweek with. Thanks.
| Free forum by Nabble | Edit this page |