Re: Error generating Odometry Data - KITTI Dataset Sequence 00
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-generating-Odometry-Data-KITTI-Dataset-Sequence-00-tp9217p9230.html
Hi, I was using a version with OpenCV from source (With OpenCV xfeatures2d: true), which used different features by default. However I just tried again with ros binaries:
I don't see big differences, here is the result:
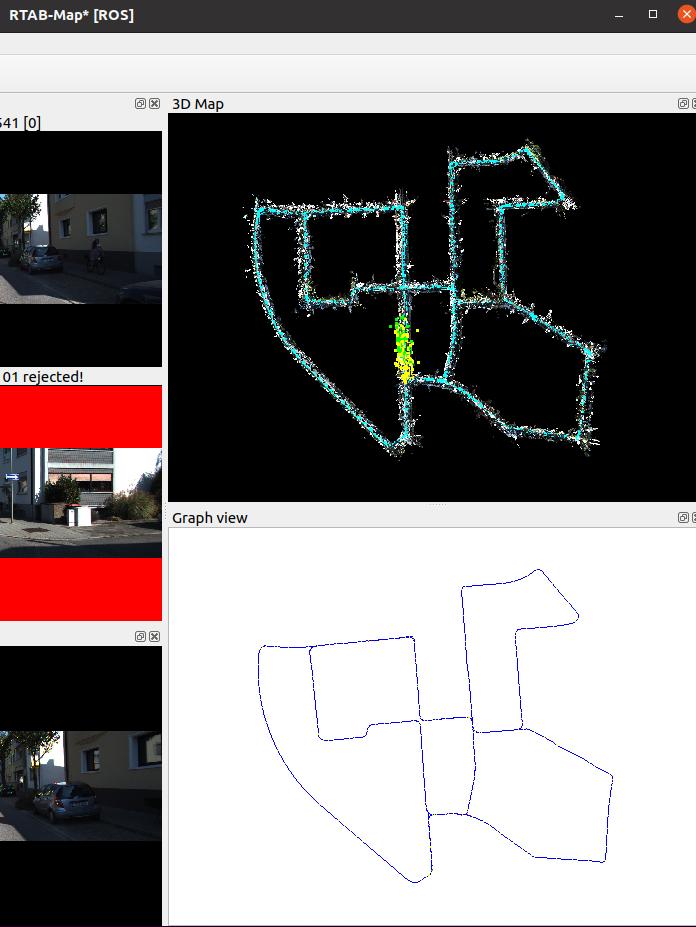
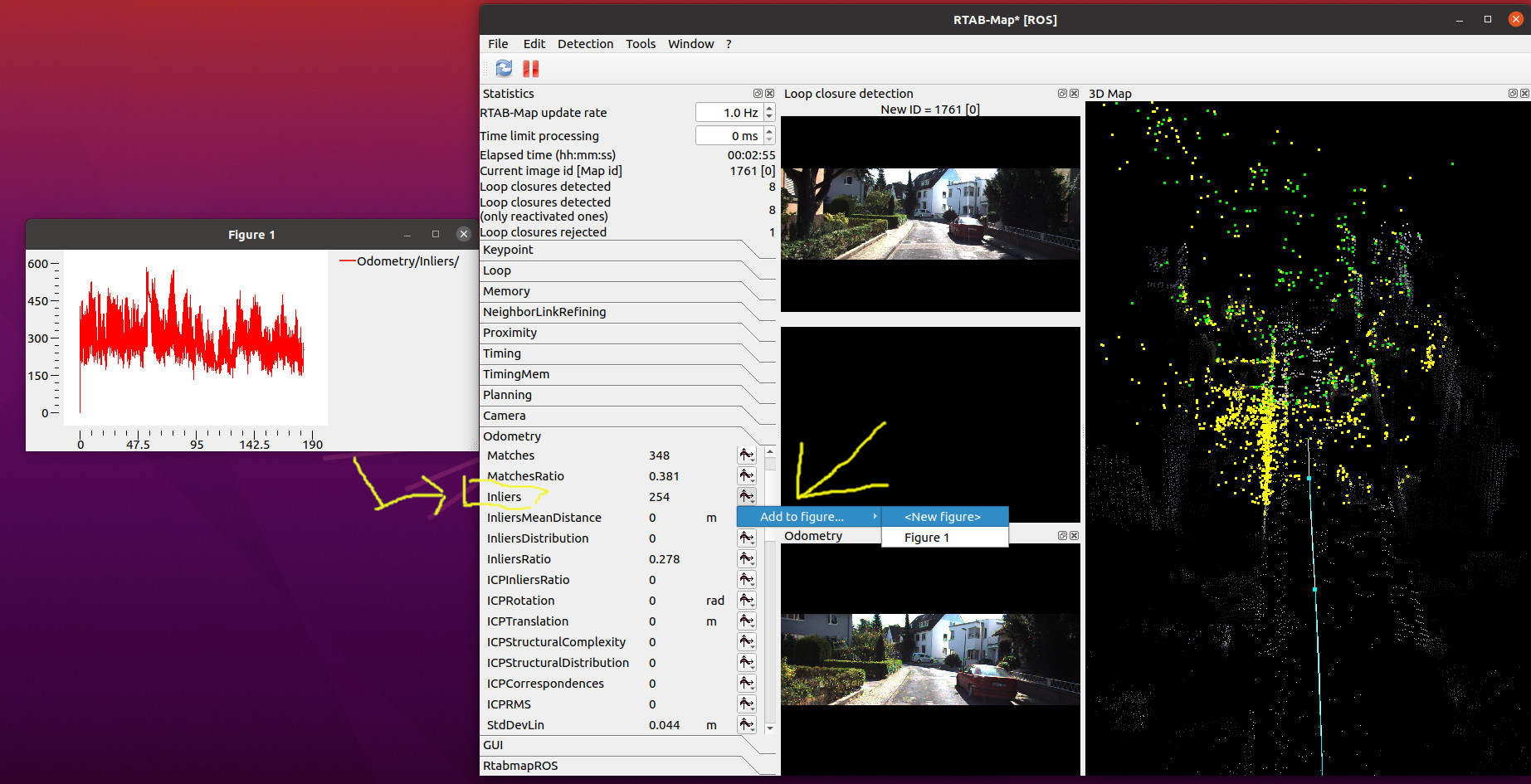
You may try to show the Odometry/Inliers statistics, to make sure we have similar number of inliers (around 300):
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-generating-Odometry-Data-KITTI-Dataset-Sequence-00-tp9217p9230.html
Hi, I was using a version with OpenCV from source (With OpenCV xfeatures2d: true), which used different features by default. However I just tried again with ros binaries:
rtabmap --version RTAB-Map: 0.20.21 PCL: 1.10.0 With VTK: 7.1.1 OpenCV: 4.2.0 With OpenCV xfeatures2d: false With OpenCV nonfree: false With ORB OcTree: true With SuperPoint Torch: false With Python3: false With FastCV: false With OpenGV: false With Madgwick: true With PDAL: false With TORO: true With g2o: true With GTSAM: false With Vertigo: true With CVSBA: false With Ceres: false With OpenNI2: true With Freenect: true With Freenect2: false With K4W2: false With K4A: false With DC1394: true With FlyCapture2: false With ZED: false With ZED Open Capture: false With RealSense: false With RealSense SLAM: false With RealSense2: false With MYNT EYE S: false With DepthAI: false With libpointmatcher: true With CCCoreLib: false With octomap: true With cpu-tsdf: false With open chisel: false With Alice Vision: false With LOAM: false With FLOAM: false With FOVIS: false With Viso2: false With DVO: false With ORB_SLAM: false With OKVIS: false With MSCKF_VIO: false With VINS-Fusion: false With OpenVINS: false
I don't see big differences, here is the result:
You may try to show the Odometry/Inliers statistics, to make sure we have similar number of inliers (around 300):
| Free forum by Nabble | Edit this page |