Re: Aruco Marker Landmarks error in Localisation after good mapping.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Aruco-Marker-Landmarks-error-in-Localisation-after-good-mapping-tp9144p9236.html
Hi,
Hummm, I cannot confirm if laser_geometry handles clockwise scans correctly. Normally, here, the laser scan would be converted to point cloud and corrected depending on the odometry. I assume you are referring to rtabmap node (not icp_odometry).
The scan seems okay in the database. Only problem I see is that TF between the camera and base_link / laser link is wrong:
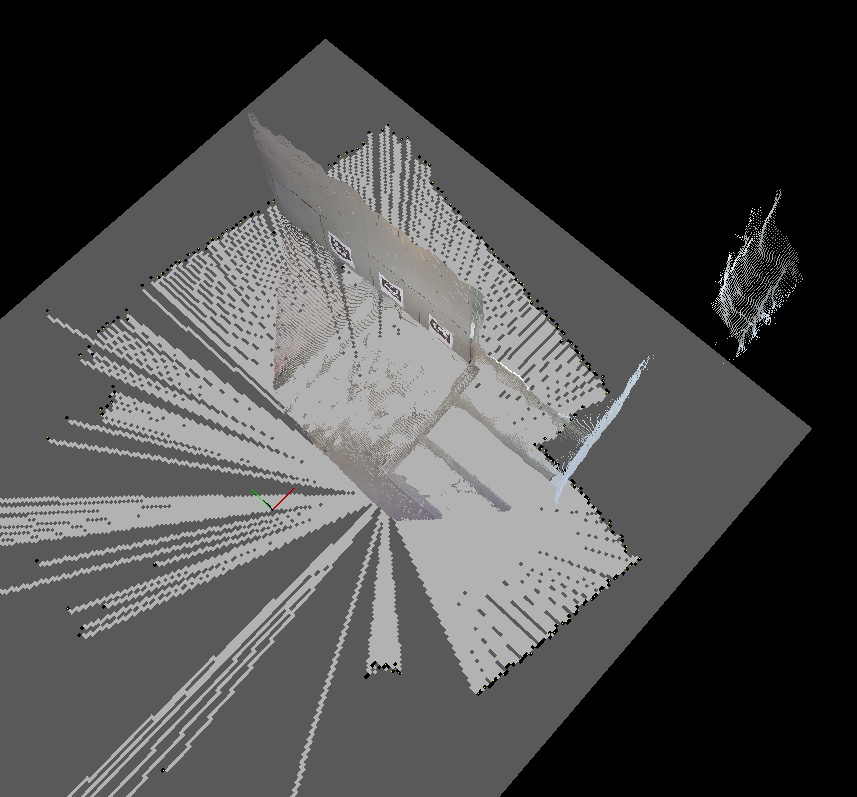
If you compute your point cloud outside, you can compute also the normals, and feed a XYZNormal point cloud to rtabmap.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Aruco-Marker-Landmarks-error-in-Localisation-after-good-mapping-tp9144p9236.html
Hi,
Hummm, I cannot confirm if laser_geometry handles clockwise scans correctly. Normally, here, the laser scan would be converted to point cloud and corrected depending on the odometry. I assume you are referring to rtabmap node (not icp_odometry).
The scan seems okay in the database. Only problem I see is that TF between the camera and base_link / laser link is wrong:
If you compute your point cloud outside, you can compute also the normals, and feed a XYZNormal point cloud to rtabmap.
| Free forum by Nabble | Edit this page |