3D mapping and 3D navigation
Posted by sean819 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-mapping-and-3D-navigation-tp925.html
Hi Mathieu,
I am the beginner with ROS and I am learning much more about ROS.
I want to build a quadcopter which and do 3D mapping like this only with RGB-D camera.
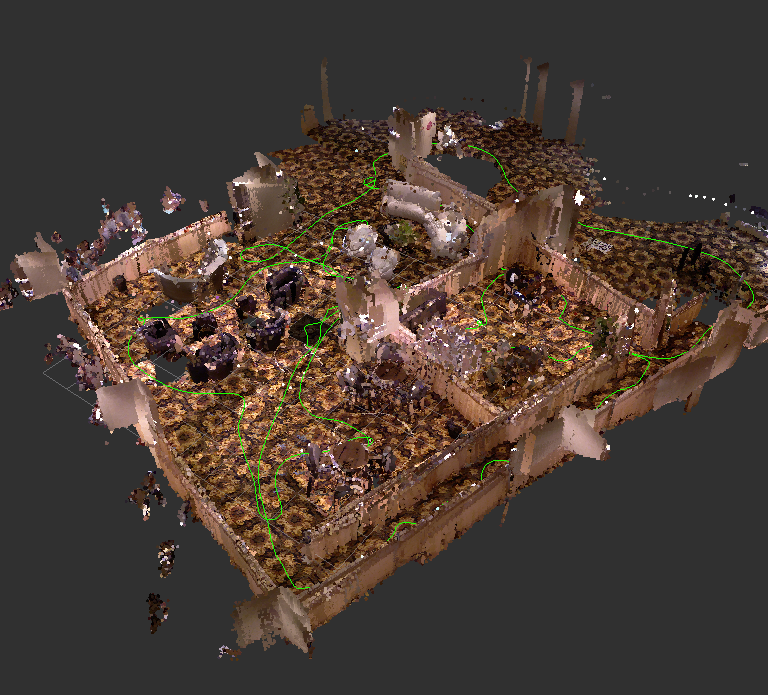
And do 3D navigation indoor.
I have a quadcopter which flying controller is pixhawk. And onboard system odroid XU4.
I have two ideas now.
1.Use RGB-D camera and use openni to do 3D mapping. And then use openni to convert to octomap for 3D navigation.
2.Use RGB-D camera and use RTAB-MAP to do 3D mapping. And then use RTAB-map to convert to octomap for 3D navigation.
The problem is I am not sure this method is feasible or not.
About RGB-D camera.I am not sure which one is better,Asus Xtion pro, Kinect or structure sensor.
I prefer Xtion pro,because it is lighter. Cons of Kinect is heavy,and cons structure sensor is it doesn't have RGB camera inside.But i am not sure RTAB*MAP support Xtion pro or not.
And algorithm of 3D navigation.I have two method now.3D navigation or quadrotor_navigation.
I can't find more information about quadrotor_navigation in ROS wiki.
Do you have any recommend to do 3D navigation?
Sorry about asking stupid question if i did. I think i need directions on how to do and how to proceed of this project.
Sincerely,
Sean
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-mapping-and-3D-navigation-tp925.html
Hi Mathieu,
I am the beginner with ROS and I am learning much more about ROS.
I want to build a quadcopter which and do 3D mapping like this only with RGB-D camera.
And do 3D navigation indoor.
I have a quadcopter which flying controller is pixhawk. And onboard system odroid XU4.
I have two ideas now.
1.Use RGB-D camera and use openni to do 3D mapping. And then use openni to convert to octomap for 3D navigation.
2.Use RGB-D camera and use RTAB-MAP to do 3D mapping. And then use RTAB-map to convert to octomap for 3D navigation.
The problem is I am not sure this method is feasible or not.
About RGB-D camera.I am not sure which one is better,Asus Xtion pro, Kinect or structure sensor.
I prefer Xtion pro,because it is lighter. Cons of Kinect is heavy,and cons structure sensor is it doesn't have RGB camera inside.But i am not sure RTAB*MAP support Xtion pro or not.
And algorithm of 3D navigation.I have two method now.3D navigation or quadrotor_navigation.
I can't find more information about quadrotor_navigation in ROS wiki.
Do you have any recommend to do 3D navigation?
Sorry about asking stupid question if i did. I think i need directions on how to do and how to proceed of this project.
Sincerely,
Sean
| Free forum by Nabble | Edit this page |