Re: Livox Avia, + Depth cameras and organized point clouds.
Posted by FPSychoric on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9252.html
well I could fix the Pointcloud2 format, and the IMU issues were solved and the thing started to map quite good for a first test in small room, and it looks the loop closure is working too as seen in the images, but not sure really it is doing something, as I think the VO node is not working.
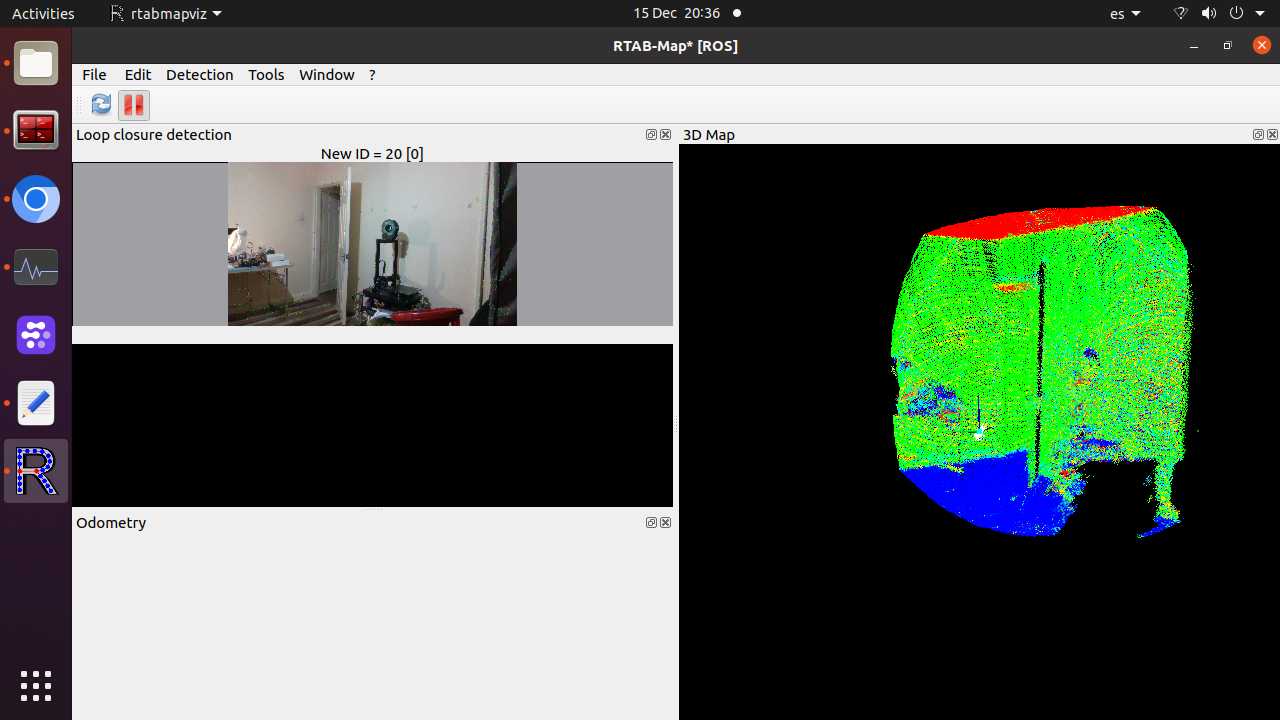
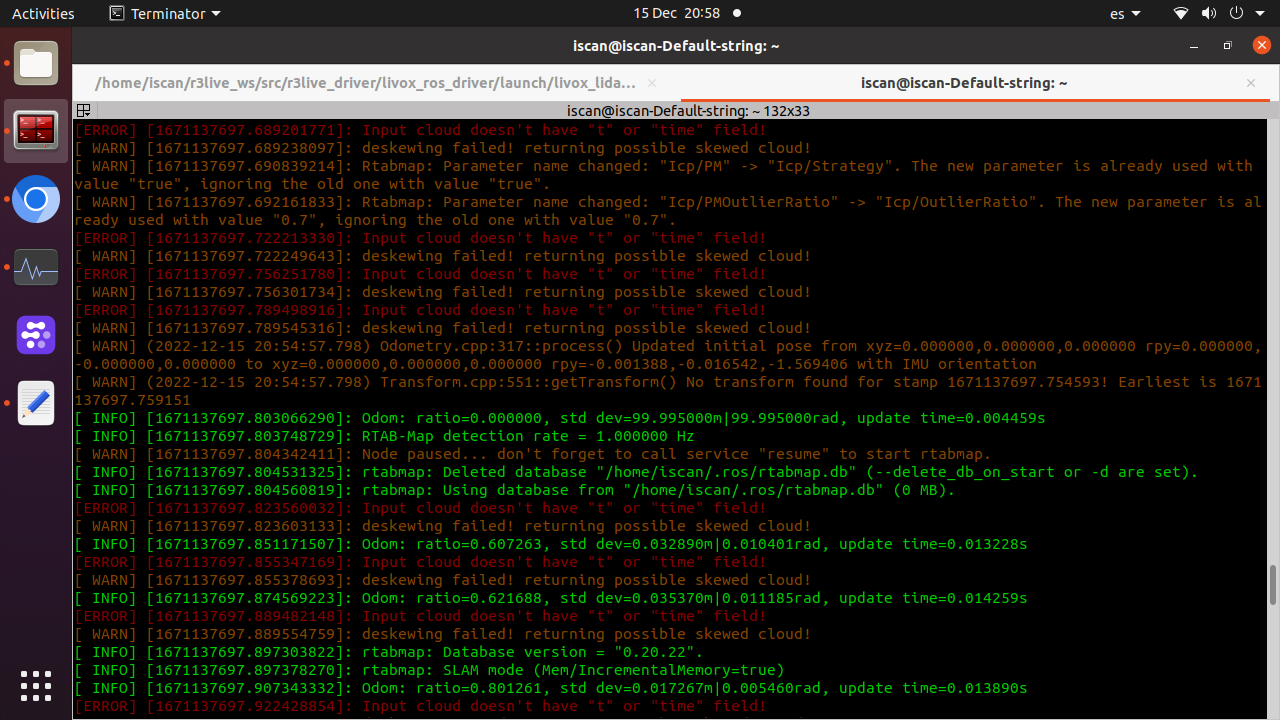
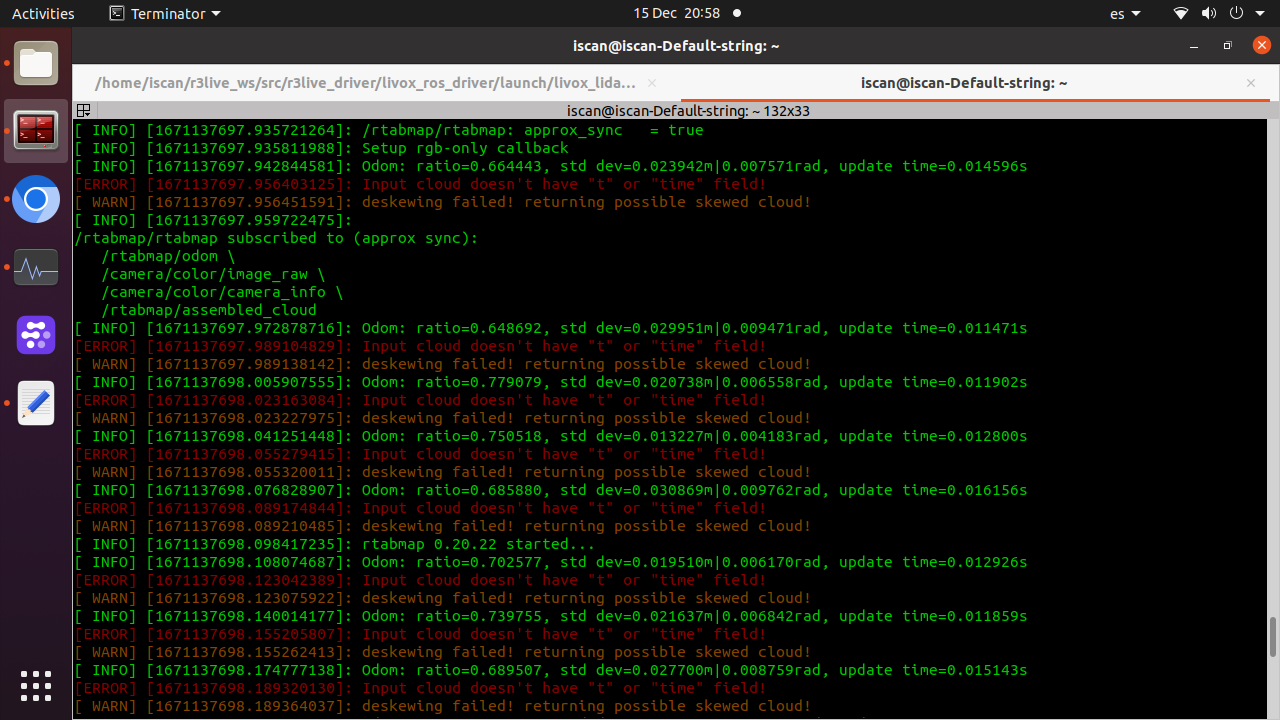
Now my issues/warnings is the seen in the pictures.
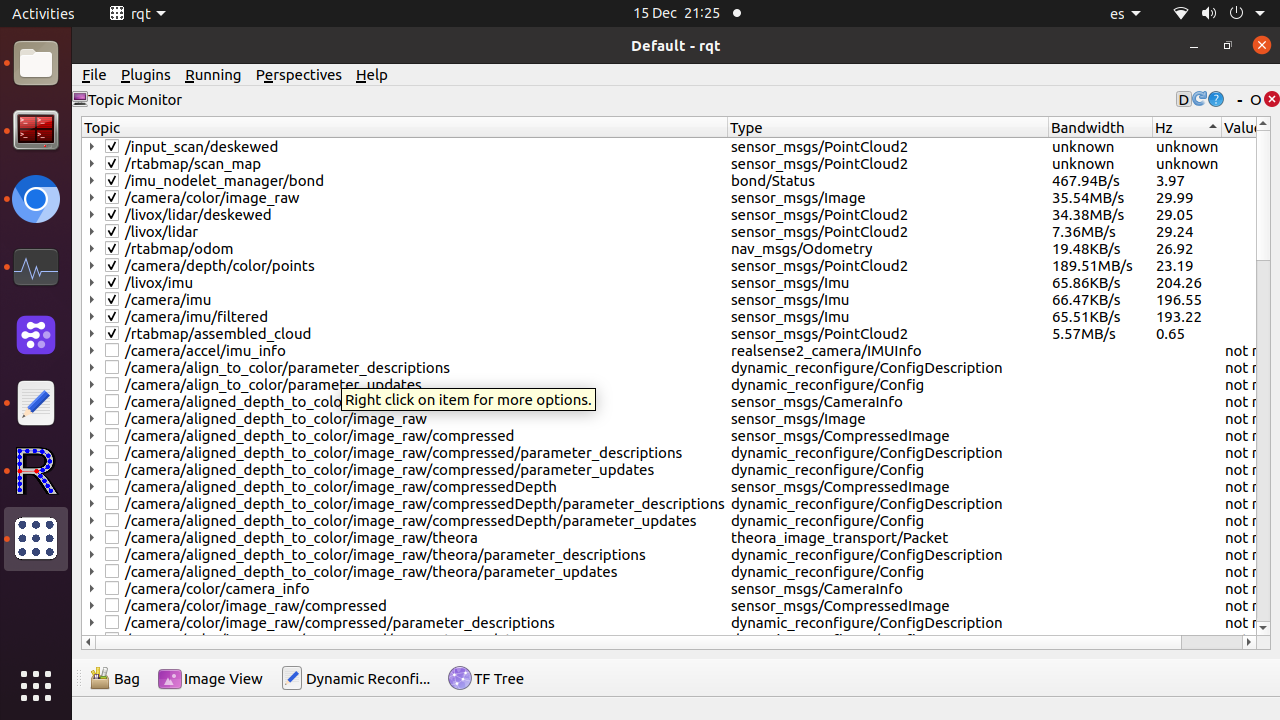
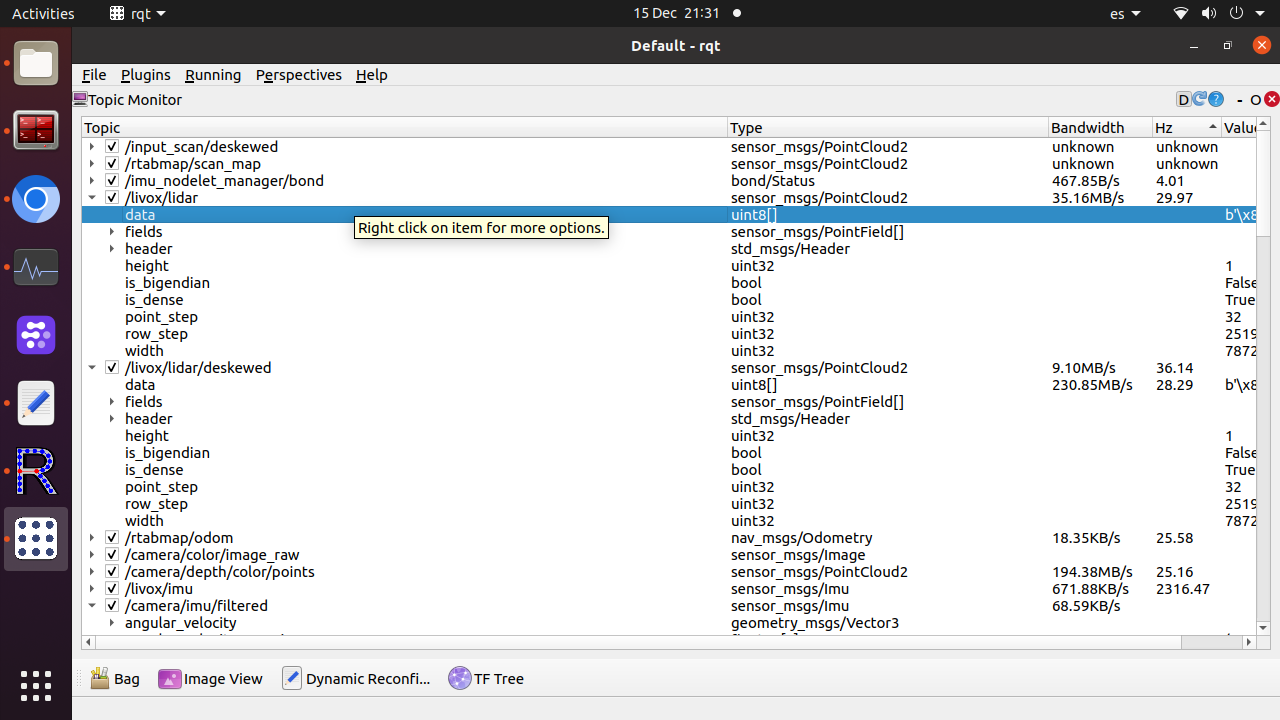
I'm getting a lidar/livox/deskewed topic, It is published at 30hz as expected and I can see the cloud in rviz/rtabviz.
What I seen is that it maybe is not working, even if it is being published as, maybe one of the errors aim to it, if deskewing function does make ordered pointclouds I would expect read in its topic header is_dense=false allowing NaN points as it explained in PCL site and in this link i.e. https://github.com/IntelRealSense/realsense-ros/issues/1563.
here images of the relevant topics with fps and is_dense true
By the way I just seen hidden in Livox github repository a deskewing tool that publish /livox_unidistort https://github.com/Livox-SDK/livox_cloud_undistortion.
To be honest I don't know if undistort a pointcloud is the same that deskewing and both the same of a ordered pointcloud.
Respect to ordered pointclouds, what I found is that Rtabviz, when export the map to .ply, give you the option to save the pointcloud in ordered type, which I think it is what I would like to get, not sure how to check if it is the same ordered pointcloud I refer above n my first message, but I noted that to mesh it in Cloud Compare didn't need calculate the normals, which is nice and a symptom that maybe that is all what I need (with rgb colors), not sure if deskewing node is such thing or it is a needed step to can save oredered pointclouds. Deskewing and lidar pointclouds undistortion a new thing for me, as almost ordered pointclouds.
I'm not getting RGB point cloud but it starting to look promising. I even now have the option to send deskweked pointcloud to rtabmap if I get a advante if do it, supposing your node and that tool do the same thing.
I think is a nice think for the moment discover livox works with rtabmab. Off course if your interested in test anything even if it is not related with my question , just let me know I will be happy test any that rise your curiosity.
Edit
As update , just say the LIVOX deskew package doesn't work with Rtabmap due to timestamps, as it use lidar time and the modified driver use ROS/system time, and this, doesn't work with the deskew pkge, so it looks a wall for some as me that don't know coding.
The pointcloud even if it now works with Rtabmap, still have missing the time argument in the pointcloud (but the topic has good timestamp), because that is the error t/time. Velodynes and Oister gives such time field, Livox doesn't.
Still there is other softwares that deskew and some allow the pointcloud time modification, so I will try copy the system or use their deskewed pointcloud2 as input for Rtabmap as possible workaround.
LiO-Livox and Lio-SAM do that, but they are for Livox Horizon and is not clear the compatibility with Avia.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9252.html
well I could fix the Pointcloud2 format, and the IMU issues were solved and the thing started to map quite good for a first test in small room, and it looks the loop closure is working too as seen in the images, but not sure really it is doing something, as I think the VO node is not working.
Now my issues/warnings is the seen in the pictures.
I'm getting a lidar/livox/deskewed topic, It is published at 30hz as expected and I can see the cloud in rviz/rtabviz.
What I seen is that it maybe is not working, even if it is being published as, maybe one of the errors aim to it, if deskewing function does make ordered pointclouds I would expect read in its topic header is_dense=false allowing NaN points as it explained in PCL site and in this link i.e. https://github.com/IntelRealSense/realsense-ros/issues/1563.
here images of the relevant topics with fps and is_dense true
By the way I just seen hidden in Livox github repository a deskewing tool that publish /livox_unidistort https://github.com/Livox-SDK/livox_cloud_undistortion.
To be honest I don't know if undistort a pointcloud is the same that deskewing and both the same of a ordered pointcloud.
Respect to ordered pointclouds, what I found is that Rtabviz, when export the map to .ply, give you the option to save the pointcloud in ordered type, which I think it is what I would like to get, not sure how to check if it is the same ordered pointcloud I refer above n my first message, but I noted that to mesh it in Cloud Compare didn't need calculate the normals, which is nice and a symptom that maybe that is all what I need (with rgb colors), not sure if deskewing node is such thing or it is a needed step to can save oredered pointclouds. Deskewing and lidar pointclouds undistortion a new thing for me, as almost ordered pointclouds.
I'm not getting RGB point cloud but it starting to look promising. I even now have the option to send deskweked pointcloud to rtabmap if I get a advante if do it, supposing your node and that tool do the same thing.
I think is a nice think for the moment discover livox works with rtabmab. Off course if your interested in test anything even if it is not related with my question , just let me know I will be happy test any that rise your curiosity.
Edit
As update , just say the LIVOX deskew package doesn't work with Rtabmap due to timestamps, as it use lidar time and the modified driver use ROS/system time, and this, doesn't work with the deskew pkge, so it looks a wall for some as me that don't know coding.
The pointcloud even if it now works with Rtabmap, still have missing the time argument in the pointcloud (but the topic has good timestamp), because that is the error t/time. Velodynes and Oister gives such time field, Livox doesn't.
Still there is other softwares that deskew and some allow the pointcloud time modification, so I will try copy the system or use their deskewed pointcloud2 as input for Rtabmap as possible workaround.
LiO-Livox and Lio-SAM do that, but they are for Livox Horizon and is not clear the compatibility with Avia.
| Free forum by Nabble | Edit this page |