Re: Livox Avia, + Depth cameras and organized point clouds.
Posted by FPSychoric on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9256.html
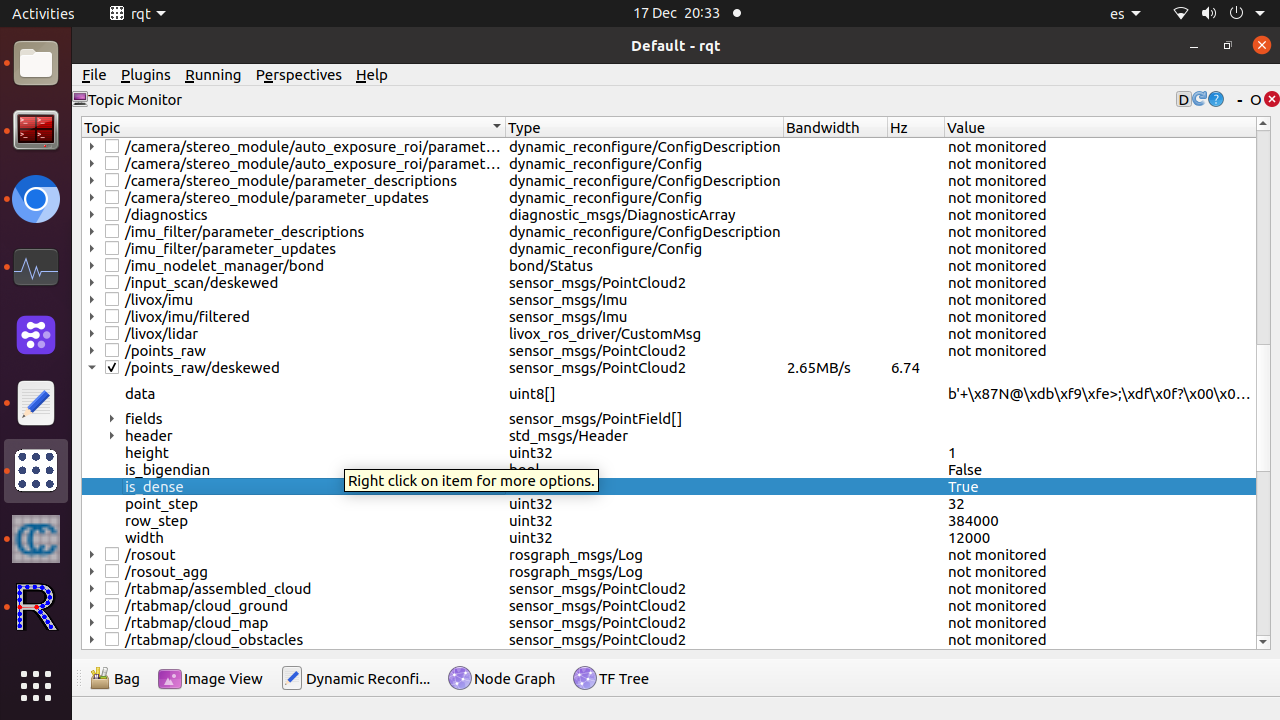
Hi some news, quite good, I I got everything working without errors. I did get the lidar works sending the data, time field and timestamp as rtabmap needs. The livox deskewing package just wont work in my setup.
I get all topics, deskewed point clouds, they have normals and I can mesh them. I used camera projection from rviz exporting options in .PLY.
What I see when I export and make the cloud from the laser scan, the option "save as organized point cloud is shadowed" , I guess it is my next step and related with this that you said:
"A depth image is then referred as organized. For survey scanner, they may generate RGB image + Depth image, or even an organized point cloud with RGB channel for each point. The LAS format can support this. With RTAB-Map, we can export in LAS for convenience. If you feed a depth image to rtabmap, you will be able to export RGB + Depth and the generated colored point cloud. If you feed only RGB + Lidar scan, you won't be able to export depth image for each RGB frame, only the colored point cloud. However, with some changes to rtabmap-export tool (with --cam_projection option), you could save the depth images from lidar data, as they are generated already here (replacing that function with this one for each camera)."
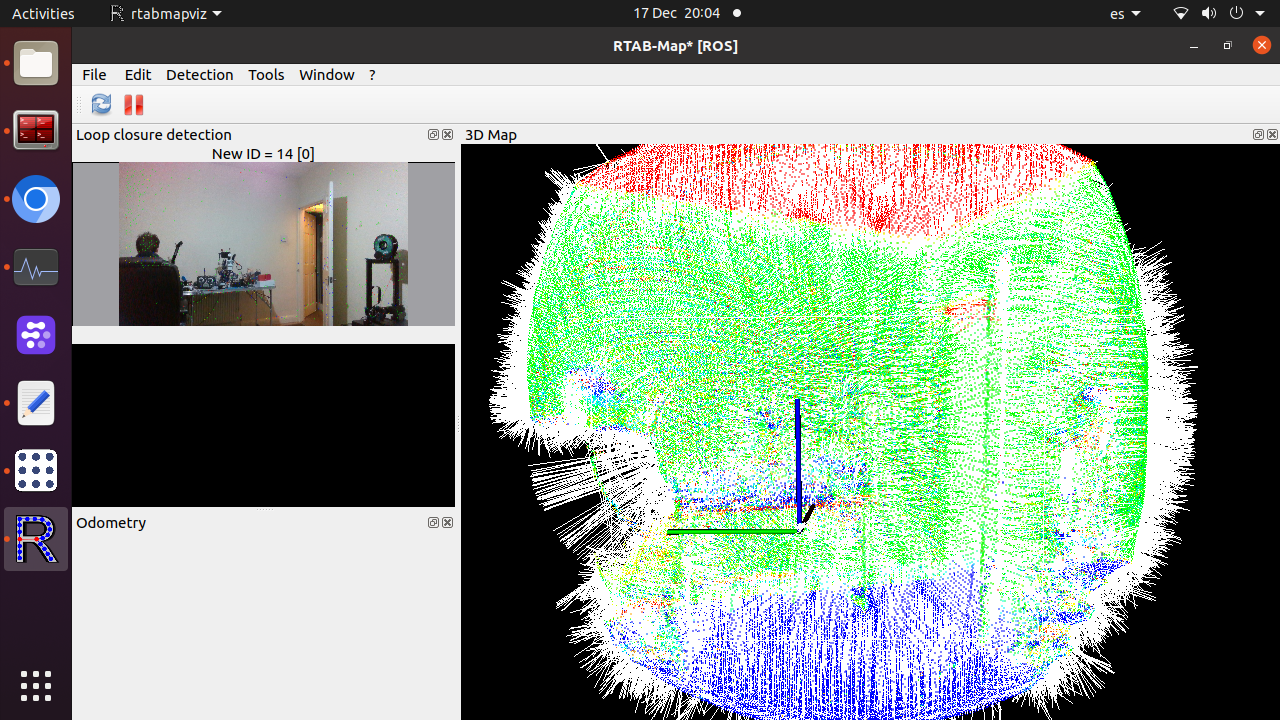
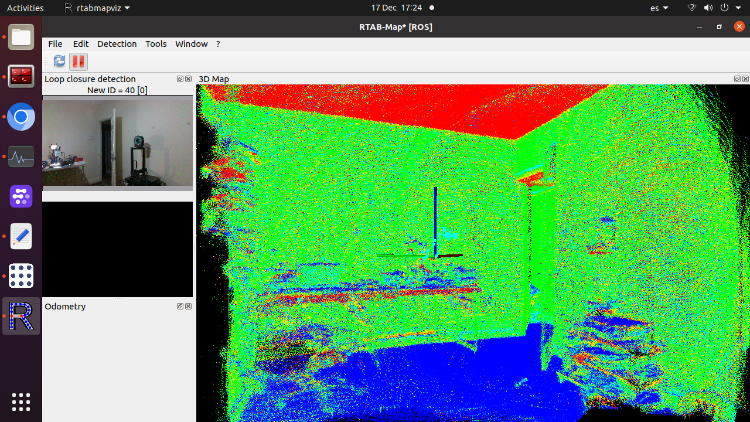
the issues were fixed, do you want still the .bag file, would you prefer outdoors? livox are quite bad indoors, [but with rtabmap works better than fastlio2, maybe a need tunning both to can compare, I should to do a lot of test, just I need now find a workflow and learn to optimise, setup rtabmap, add some node as depth from laserscan and VO and test external odometry from orbslam or fastlio i.e.
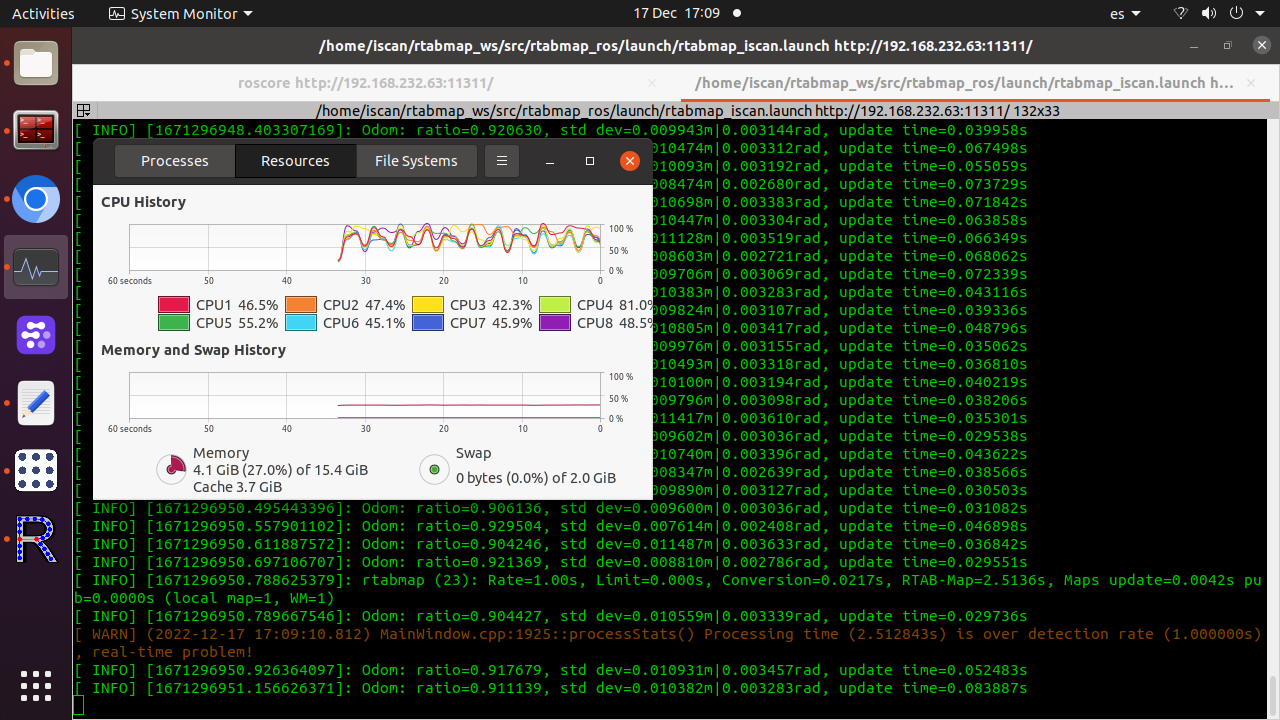
How it performs in precision,cpu/memory use not sure, for me looks ok, deskewing looks a quite heavy task, maybe like loop clousure. Without Rtabviz works quite more light.
A possible problem I have is my camera/lidar is calibrated against camera_colour_frame I think ( or maybe color_optical_frame?, but in the TF publisher of rtabmap's launch, is being publishing to camera_link frame (transform from the matrix 4x4) so I think such TF should be camera_link frame - camera_color_frame.
Also I added a TF with the extrinsic lidar/lidar IMU, not sure if that is better or even necessary, but I think so, it is not published by livox skd or driver.
Thanks for all your help, I will upload the .bag if you still need it, I made it work with livox imu and d435 imu which I should use in your bag? .
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9256.html
Hi some news, quite good, I I got everything working without errors. I did get the lidar works sending the data, time field and timestamp as rtabmap needs. The livox deskewing package just wont work in my setup.
I get all topics, deskewed point clouds, they have normals and I can mesh them. I used camera projection from rviz exporting options in .PLY.
What I see when I export and make the cloud from the laser scan, the option "save as organized point cloud is shadowed" , I guess it is my next step and related with this that you said:
"A depth image is then referred as organized. For survey scanner, they may generate RGB image + Depth image, or even an organized point cloud with RGB channel for each point. The LAS format can support this. With RTAB-Map, we can export in LAS for convenience. If you feed a depth image to rtabmap, you will be able to export RGB + Depth and the generated colored point cloud. If you feed only RGB + Lidar scan, you won't be able to export depth image for each RGB frame, only the colored point cloud. However, with some changes to rtabmap-export tool (with --cam_projection option), you could save the depth images from lidar data, as they are generated already here (replacing that function with this one for each camera)."
the issues were fixed, do you want still the .bag file, would you prefer outdoors? livox are quite bad indoors, [but with rtabmap works better than fastlio2, maybe a need tunning both to can compare, I should to do a lot of test, just I need now find a workflow and learn to optimise, setup rtabmap, add some node as depth from laserscan and VO and test external odometry from orbslam or fastlio i.e.
How it performs in precision,cpu/memory use not sure, for me looks ok, deskewing looks a quite heavy task, maybe like loop clousure. Without Rtabviz works quite more light.
A possible problem I have is my camera/lidar is calibrated against camera_colour_frame I think ( or maybe color_optical_frame?, but in the TF publisher of rtabmap's launch, is being publishing to camera_link frame (transform from the matrix 4x4) so I think such TF should be camera_link frame - camera_color_frame.
Also I added a TF with the extrinsic lidar/lidar IMU, not sure if that is better or even necessary, but I think so, it is not published by livox skd or driver.
Thanks for all your help, I will upload the .bag if you still need it, I made it work with livox imu and d435 imu which I should use in your bag? .
| Free forum by Nabble | Edit this page |