Re: Livox Avia, + Depth cameras and organized point clouds.
Posted by FPSychoric on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9259.html
Hi , following with the good news I got work the laser_scan to depth node, so now I can convert the deskewed point cloud to depth and I should be able to get organized point clouds from that depth. The export command to .las worked with the deskewed point clouds, I didnt try yet with the depth+RGB. I have a last issue to align the RGB and d435 point cloud and ̣color image, with the lidar pointcloud. It is due to my 4x4 matrix conversion that is wrong. I could make work that matrix in other slam packages, no without issues as some had the matrix inverted.
My extrinsic camera/lidar looks like this and it works in other software, introduced as matrix, it is not needed convert it to TF, and there is were my problems start by lack of maths knowledge.
-0.00166874,-0.999969,-0.00768157,-0.013776
-0.00286365,0.0076861,-0.999967,0.0347174
0.999995,-0.00164645,-0.00287661,-0.0972432
0,0,0,1
I take the 3 right values for x y z
I introduce remain 3x3 matrix in this website:
https://www.energid.com/resources/orientation-calculator
and here
https://www.andre-gaschler.com/rotationconverter/
I tried every result
I tried ingress the output of quaternion or angle-axis from the calculator to TF and TF2 publisher in the rtabmap launch
<node unless="$(arg use_sim_time)" pkg="tf" type="static_transform_publisher" name="livox_frame_to_camera_link" args="x y z qx qy qz _frame camera_link 10"/>
or
<node unless="$(arg use_sim_time)" pkg="tf2_ros" type="static_transform_publisher" name="livox_frame_to_camera_link" args="x y z qx qy qz qw livox_frame camera_link 10"/>
I tried changing camera_link by camera_color_optical_frame, which have sense as it is the frame of camera_info topic i used to calibration, but didnt work. Maybe I'm putting wrong numbers or format
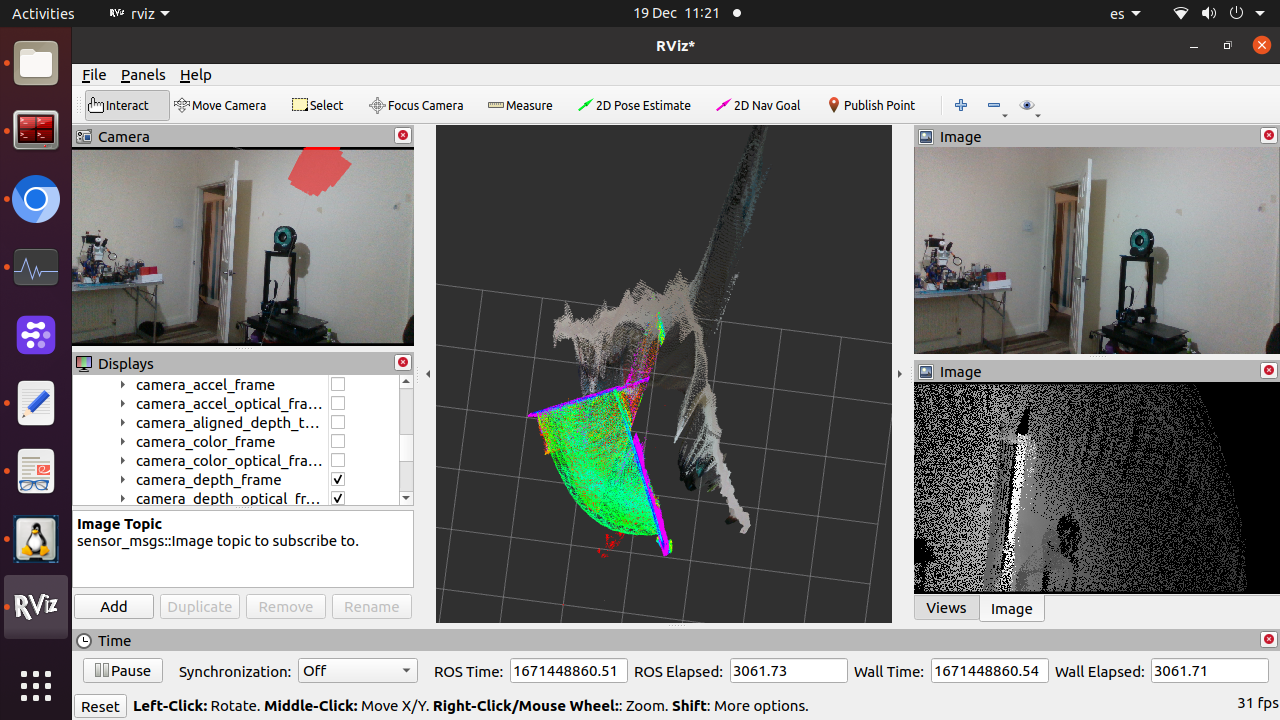
I'm no able to align the frames as shown in the picture, does rtabmap need a expecial matrix transformation or need be calculated in a different way than the online calculator?
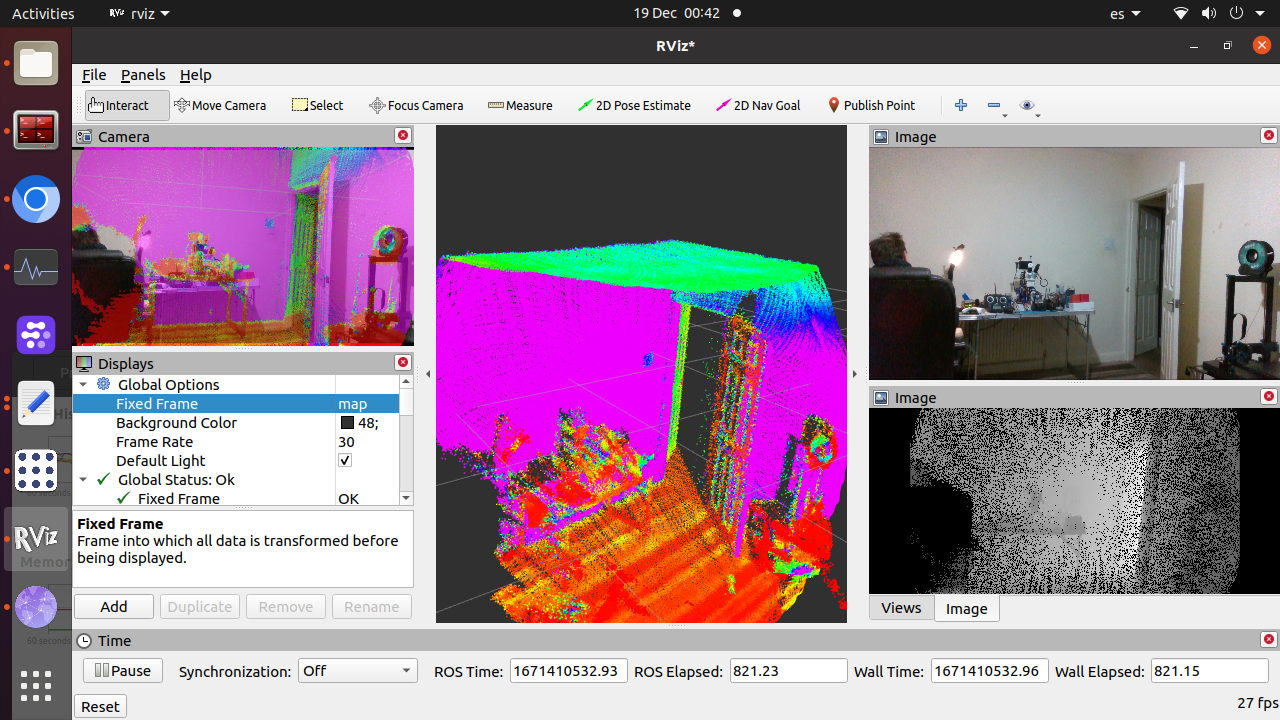
Even if I put the transform 0 0 0 0 0 0 camera and lidar the point clouds of both doesnt fit , which I cannot really undersand, but in that case at least the orientation is close to right or right.
I don't expect you help me with the transformation as it is not a rtabmap thing, but would be nice if you can confirm that the way I do it should work, as if so , the only thing I can imagine as origen of this issue is that my matrix is against color_camera_optical_frame instead camera_link as they have not the same ENU coordinate. Maybe should I use a specific calibration tool for Rtabmap that gives direct results as Kalibr?
Thanks!
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9259.html
Hi , following with the good news I got work the laser_scan to depth node, so now I can convert the deskewed point cloud to depth and I should be able to get organized point clouds from that depth. The export command to .las worked with the deskewed point clouds, I didnt try yet with the depth+RGB. I have a last issue to align the RGB and d435 point cloud and ̣color image, with the lidar pointcloud. It is due to my 4x4 matrix conversion that is wrong. I could make work that matrix in other slam packages, no without issues as some had the matrix inverted.
My extrinsic camera/lidar looks like this and it works in other software, introduced as matrix, it is not needed convert it to TF, and there is were my problems start by lack of maths knowledge.
-0.00166874,-0.999969,-0.00768157,-0.013776
-0.00286365,0.0076861,-0.999967,0.0347174
0.999995,-0.00164645,-0.00287661,-0.0972432
0,0,0,1
I take the 3 right values for x y z
I introduce remain 3x3 matrix in this website:
https://www.energid.com/resources/orientation-calculator
and here
https://www.andre-gaschler.com/rotationconverter/
I tried every result
I tried ingress the output of quaternion or angle-axis from the calculator to TF and TF2 publisher in the rtabmap launch
<node unless="$(arg use_sim_time)" pkg="tf" type="static_transform_publisher" name="livox_frame_to_camera_link" args="x y z qx qy qz _frame camera_link 10"/>
or
<node unless="$(arg use_sim_time)" pkg="tf2_ros" type="static_transform_publisher" name="livox_frame_to_camera_link" args="x y z qx qy qz qw livox_frame camera_link 10"/>
I tried changing camera_link by camera_color_optical_frame, which have sense as it is the frame of camera_info topic i used to calibration, but didnt work. Maybe I'm putting wrong numbers or format
I'm no able to align the frames as shown in the picture, does rtabmap need a expecial matrix transformation or need be calculated in a different way than the online calculator?
Even if I put the transform 0 0 0 0 0 0 camera and lidar the point clouds of both doesnt fit , which I cannot really undersand, but in that case at least the orientation is close to right or right.
I don't expect you help me with the transformation as it is not a rtabmap thing, but would be nice if you can confirm that the way I do it should work, as if so , the only thing I can imagine as origen of this issue is that my matrix is against color_camera_optical_frame instead camera_link as they have not the same ENU coordinate. Maybe should I use a specific calibration tool for Rtabmap that gives direct results as Kalibr?
Thanks!
| Free forum by Nabble | Edit this page |