Re: Livox Avia, + Depth cameras and organized point clouds.
Posted by FPSychoric on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9267.html
So many thanks, that helped me a lot , it worked and aligned almost the frames, still I needed compensate a very small deviation , maybe due to the camera moved from when did the calibration, but i found how do it with a homemade trick without need recalibrate, the next time I will use kalibr maybe it is easier to align.
I will learn more about that matrix and operations with them, I got some extra info to read, but I lacks of maths base.
I think the result is everything I could expect and even better, I can get close to 100% of depth coverage.
it just perform like a hyper precise RGBD camera.
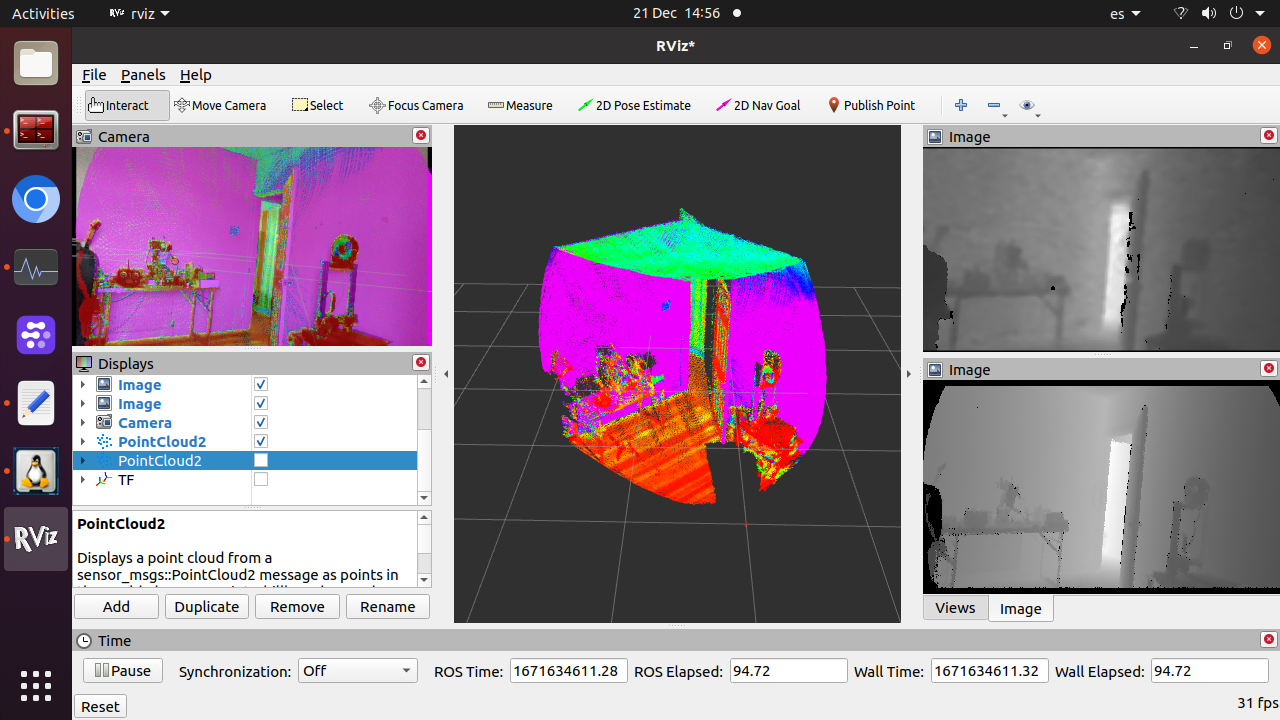
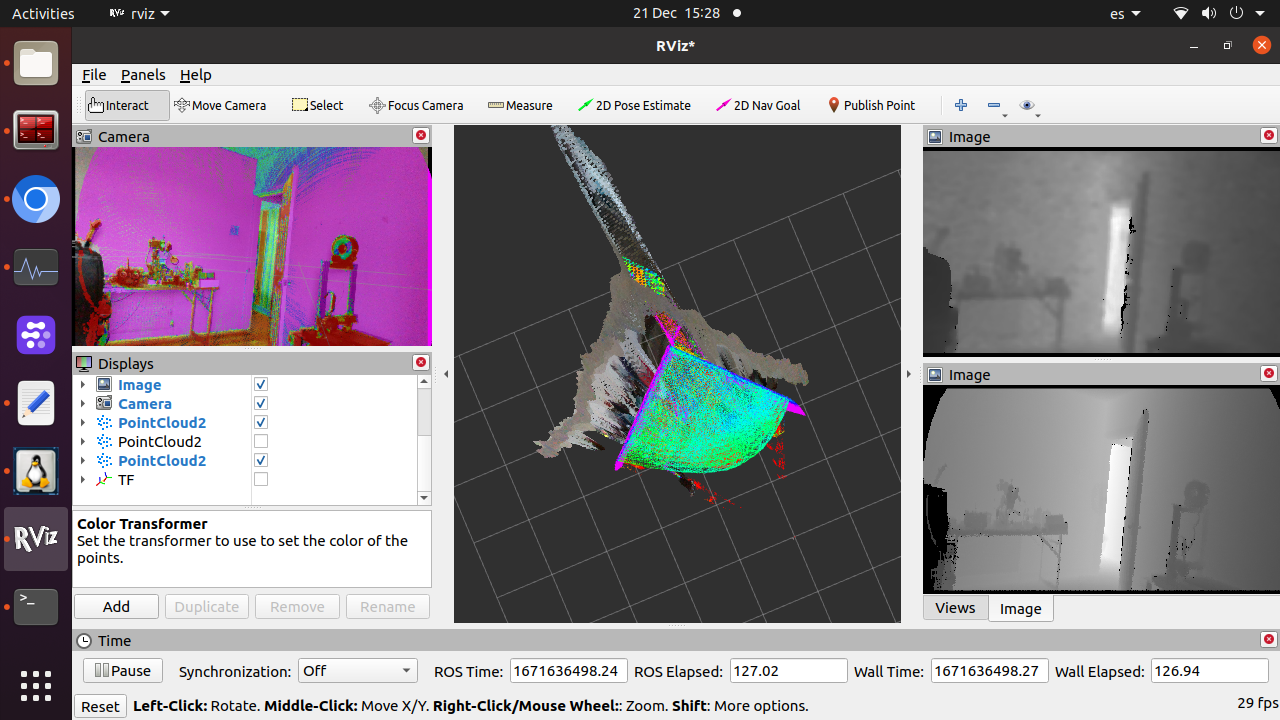
I still have a weird issue with the 435 depth and pointcloud from it (one of the reasons I never was able to align the frames), it doesn't fit with the lidar point cloud , it is not due to the frame alignment, it is due the scale, just the 3d space mapped in the d435 is bigger, maybe a bug somewhere or calibration issue or quality/noise/filter issue, have not sense what I see in the screen, and RGB image fits two both pointclouds the lidar one, and the d435 one, and in other softwares too but the ponint clouds doesn't fit. Probably it is not related with rtabmap as that pointcloud of the image is from the pointcloud generated from the d435 internally, but also externally form its aligned depth topic, doesn't mater non will fit with the lidar.
Other thing I found, maybe is not a issue, maybe it is like that and is a limitation or a option in CC that I dont know, in importing maybe, but with the commands
rtabmap-export --las --cam_projection --scan --images --normals --poses_camera --poses rtabmap.db
rtabmap-export --las --cam_projection --scan --images --poses_camera --poses rtabmap.db
I cannot get normals as happen when I export the lidar RGB point cloud in .ply from Rtabviz and that is so convenient to meshing.
both commands give in the output these lines,
Computing normals of the assembled cloud... (k=20, 474073 points)
Computing normals of the assembled cloud... done! (0.583967s, 474073 points)
Adjust normals to viewpoints of the assembled cloud... (474073 points)
Adjust normals to viewpoints of the assembled cloud... (0.310252s, 474073 points
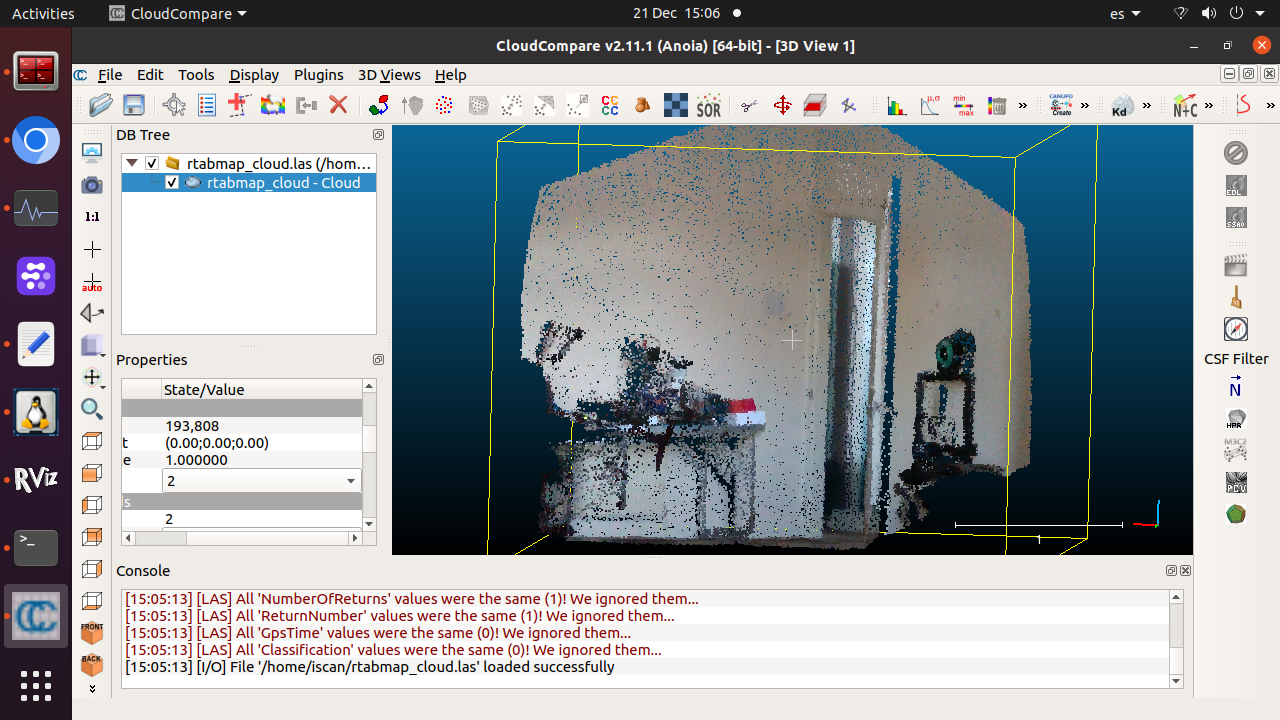
but they are not in CC. Any idea? This is the pointcloud from the .las file, looks nice.
Thanks so much by your time and apologies by take it.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9267.html
So many thanks, that helped me a lot , it worked and aligned almost the frames, still I needed compensate a very small deviation , maybe due to the camera moved from when did the calibration, but i found how do it with a homemade trick without need recalibrate, the next time I will use kalibr maybe it is easier to align.
I will learn more about that matrix and operations with them, I got some extra info to read, but I lacks of maths base.
I think the result is everything I could expect and even better, I can get close to 100% of depth coverage.
it just perform like a hyper precise RGBD camera.
I still have a weird issue with the 435 depth and pointcloud from it (one of the reasons I never was able to align the frames), it doesn't fit with the lidar point cloud , it is not due to the frame alignment, it is due the scale, just the 3d space mapped in the d435 is bigger, maybe a bug somewhere or calibration issue or quality/noise/filter issue, have not sense what I see in the screen, and RGB image fits two both pointclouds the lidar one, and the d435 one, and in other softwares too but the ponint clouds doesn't fit. Probably it is not related with rtabmap as that pointcloud of the image is from the pointcloud generated from the d435 internally, but also externally form its aligned depth topic, doesn't mater non will fit with the lidar.
Other thing I found, maybe is not a issue, maybe it is like that and is a limitation or a option in CC that I dont know, in importing maybe, but with the commands
rtabmap-export --las --cam_projection --scan --images --normals --poses_camera --poses rtabmap.db
rtabmap-export --las --cam_projection --scan --images --poses_camera --poses rtabmap.db
I cannot get normals as happen when I export the lidar RGB point cloud in .ply from Rtabviz and that is so convenient to meshing.
both commands give in the output these lines,
Computing normals of the assembled cloud... (k=20, 474073 points)
Computing normals of the assembled cloud... done! (0.583967s, 474073 points)
Adjust normals to viewpoints of the assembled cloud... (474073 points)
Adjust normals to viewpoints of the assembled cloud... (0.310252s, 474073 points
but they are not in CC. Any idea? This is the pointcloud from the .las file, looks nice.
Thanks so much by your time and apologies by take it.
| Free forum by Nabble | Edit this page |