Re: How to improve mapping accuracy based on ArUco identification code?
Posted by xsasdA on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-improve-mapping-accuracy-based-on-ArUco-identification-code-tp8393p9273.html
Hey
and if I restart the bag and launchfile a couple of times it suddenly works:
Rviz is also clearly showing the tag frame all the time, while tf_echo only shows it sometimes.
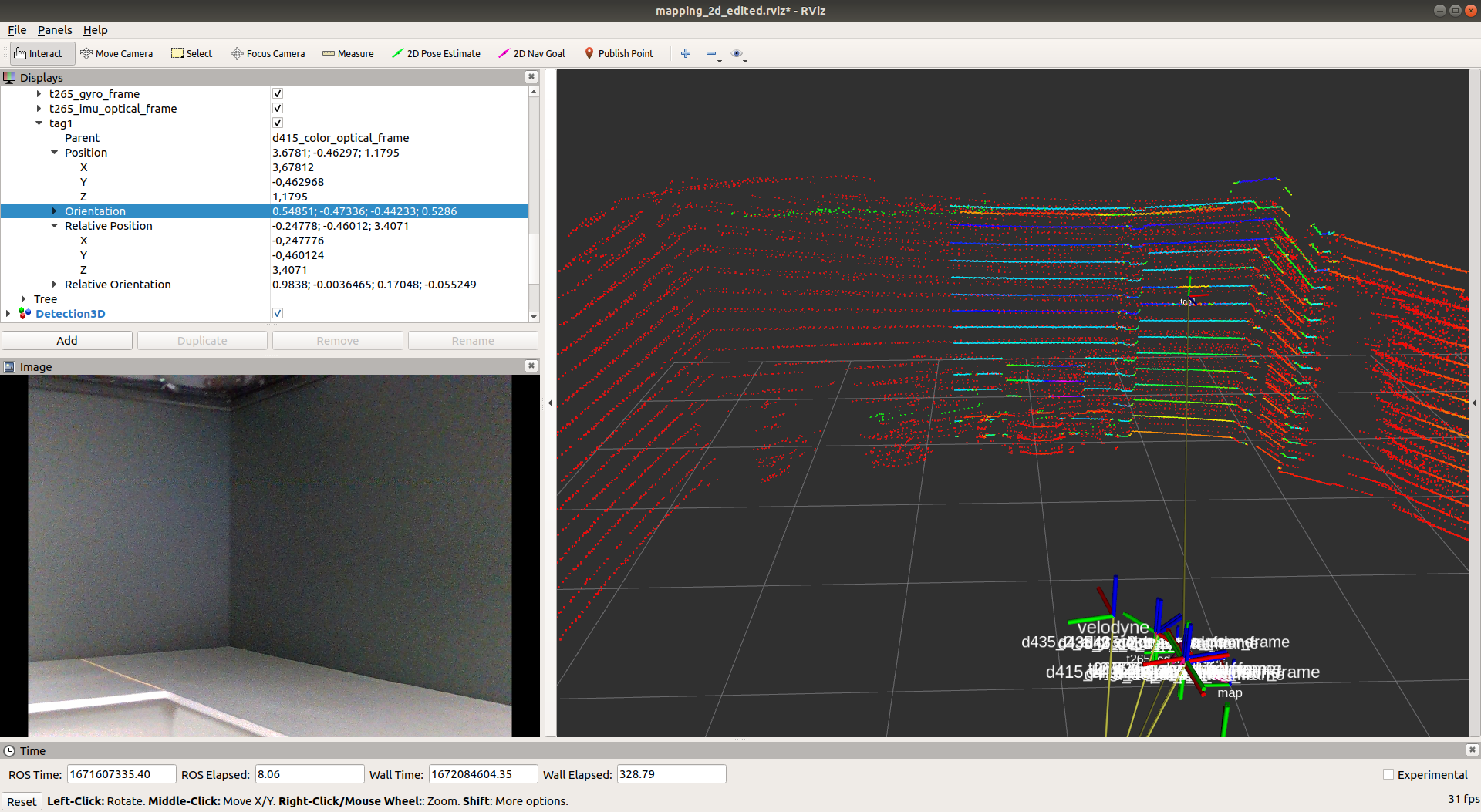
I dont know why this changes everytime and is inconsistent.
This is the output when the tag frame is showing in rviz and also gets published when running tf_echo:
This is the tf_echo output:
Even if I see the tags in rviz and they are published correctly according to tf_echo, they don't get added to the map because no green links show up in the occupancy grid map.
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-improve-mapping-accuracy-based-on-ArUco-identification-code-tp8393p9273.html
Hey
rosrun tf tf_echo base_link tag1sometimes returns
Failure at 1671607361.331520417 Exception thrown:Could not find a connection between 'base_link' and 'tag1' because they are not part of the same tree.Tf has two or more unconnected trees. The current list of frames is: Frame d435_1_link exists with parent base_link. Frame base_link exists with parent t265_pose_frame. Frame d435_2_link exists with parent base_link. Frame t265_pose_frame exists with parent t265_odom_frame. Frame t265_odom_frame exists with parent map. Frame t265_link exists with parent base_link. Frame d415_link exists with parent base_link. Frame velodyne exists with parent base_link. Frame d435_2_depth_frame exists with parent d435_2_link. Frame d435_2_depth_optical_frame exists with parent d435_2_depth_frame. Frame d435_2_color_frame exists with parent d435_2_link. Frame d435_2_color_optical_frame exists with parent d435_2_aligned_depth_to_color_frame. Frame d435_2_aligned_depth_to_color_frame exists with parent d435_2_link. Frame tag1 exists with parent d415_color_optical_frame. Frame tag2 exists with parent d415_color_optical_frame.
and if I restart the bag and launchfile a couple of times it suddenly works:
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]Rviz is also clearly showing the tag frame all the time, while tf_echo only shows it sometimes.
I dont know why this changes everytime and is inconsistent.
This is the output when the tag frame is showing in rviz and also gets published when running tf_echo:
[ INFO] [1672085149.915733152]: rtabmap 0.20.22 started... QObject::connect: Cannot queue arguments of type 'QVector<int>' (Make sure 'QVector<int>' is registered using qRegisterMetaType().) QObject::connect: Cannot queue arguments of type 'QVector<int>' (Make sure 'QVector<int>' is registered using qRegisterMetaType().) [ WARN] [1672085155.918346265, 1671607327.706539269]: Graph has changed! The whole cloud is regenerated. [ INFO] [1672085155.918995641, 1671607327.706539269]: Assembled 1 obstacle and 1 ground clouds (3084 points, 0.000666s) [ INFO] [1672085155.919231154, 1671607327.706539269]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.3435s, RTAB-Map=0.0562s, Maps update=0.0019s pub=0.0009s (local map=1, WM=1) [ INFO] [1672085156.682730310, 1671607328.472649162]: Assembled 0 obstacle and 0 ground clouds (3084 points, 0.000007s) [ INFO] [1672085156.682926731, 1671607328.472649162]: rtabmap (2): Rate=1.00s, Limit=0.000s, Conversion=0.0021s, RTAB-Map=0.1274s, Maps update=0.0033s pub=0.0002s (local map=1, WM=1) [ INFO] [1672085157.781890032, 1671607329.573166571]: Assembled 0 obstacle and 0 ground clouds (3084 points, 0.000005s) [ INFO] [1672085157.782136749, 1671607329.573166571]: rtabmap (3): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2027s, Maps update=0.0054s pub=0.0002s (local map=1, WM=1) [ INFO] [1672085158.566854579, 1671607330.350103613]: Assembled 1 obstacle and 1 ground clouds (4547 points, 0.001099s) [ INFO] [1672085158.567038972, 1671607330.360179691]: rtabmap (4): Rate=1.00s, Limit=0.000s, Conversion=0.0010s, RTAB-Map=0.0576s, Maps update=0.0015s pub=0.0013s (local map=2, WM=2) [ INFO] [1672085159.762595321, 1671607331.544776444]: Assembled 1 obstacle and 1 ground clouds (6381 points, 0.002939s) [ INFO] [1672085159.763106752, 1671607331.544776444]: rtabmap (5): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2335s, Maps update=0.0042s pub=0.0035s (local map=3, WM=3) [ INFO] [1672085160.717351405, 1671607332.505918512]: Assembled 1 obstacle and 1 ground clouds (8437 points, 0.002401s) [ INFO] [1672085160.717719630, 1671607332.505918512]: rtabmap (6): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2208s, Maps update=0.0021s pub=0.0028s (local map=4, WM=4) [ INFO] [1672085161.782531396, 1671607333.569332964]: Assembled 1 obstacle and 1 ground clouds (10164 points, 0.004941s) [ INFO] [1672085161.783106014, 1671607333.569332964]: rtabmap (7): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2464s, Maps update=0.0045s pub=0.0055s (local map=5, WM=5) [ INFO] [1672085162.746731186, 1671607334.535596350]: Assembled 1 obstacle and 1 ground clouds (11704 points, 0.005113s) [ INFO] [1672085162.747487433, 1671607334.535596350]: rtabmap (8): Rate=1.00s, Limit=0.000s, Conversion=0.0039s, RTAB-Map=0.2250s, Maps update=0.0045s pub=0.0059s (local map=6, WM=6) [ INFO] [1672085163.740559756, 1671607335.529269701]: Assembled 1 obstacle and 1 ground clouds (13212 points, 0.003867s) [ INFO] [1672085163.741133477, 1671607335.529269701]: rtabmap (9): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2017s, Maps update=0.0040s pub=0.0045s (local map=7, WM=7) [ INFO] [1672085164.777361099, 1671607336.566109024]: Assembled 1 obstacle and 1 ground clouds (14800 points, 0.006389s) [ INFO] [1672085164.778358691, 1671607336.566109024]: rtabmap (10): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.2669s, Maps update=0.0048s pub=0.0074s (local map=8, WM=8) [ INFO] [1672085165.728770096, 1671607337.519526442]: Assembled 1 obstacle and 1 ground clouds (16644 points, 0.006565s) [ INFO] [1672085165.729634144, 1671607337.519526442]: rtabmap (11): Rate=1.00s, Limit=0.000s, Conversion=0.0019s, RTAB-Map=0.1876s, Maps update=0.0053s pub=0.0074s (local map=9, WM=9) [ INFO] [1672085166.849968461, 1671607338.633045496]: Assembled 1 obstacle and 1 ground clouds (18383 points, 0.009256s) [ INFO] [1672085166.850963886, 1671607338.643147602]: rtabmap (12): Rate=1.00s, Limit=0.000s, Conversion=0.0039s, RTAB-Map=0.2896s, Maps update=0.0050s pub=0.0103s (local map=10, WM=10) [ INFO] [1672085167.747671039, 1671607339.531025854]: Assembled 1 obstacle and 1 ground clouds (20557 points, 0.001885s) [ INFO] [1672085167.748100912, 1671607339.531025854]: rtabmap (13): Rate=1.00s, Limit=0.000s, Conversion=0.0040s, RTAB-Map=0.2178s, Maps update=0.0016s pub=0.0023s (local map=11, WM=11) [ INFO] [1672085168.928839185, 1671607340.716331257]: Assembled 1 obstacle and 1 ground clouds (22825 points, 0.010493s) [ INFO] [1672085168.930344351, 1671607340.716331257]: rtabmap (14): Rate=1.00s, Limit=0.000s, Conversion=0.0040s, RTAB-Map=0.3445s, Maps update=0.0060s pub=0.0120s (local map=12, WM=12) [ INFO] [1672085169.945472545, 1671607341.732082369]: Assembled 1 obstacle and 1 ground clouds (25009 points, 0.009224s) [ INFO] [1672085169.946553382, 1671607341.732082369]: rtabmap (15): Rate=1.00s, Limit=0.000s, Conversion=0.0036s, RTAB-Map=0.3504s, Maps update=0.0035s pub=0.0103s (local map=13, WM=13) [ INFO] [1672085170.907639929, 1671607342.680193129]: Assembled 1 obstacle and 1 ground clouds (26901 points, 0.011770s) [ INFO] [1672085170.909249749, 1671607342.700296234]: rtabmap (16): Rate=1.00s, Limit=0.000s, Conversion=0.0035s, RTAB-Map=0.3531s, Maps update=0.0042s pub=0.0134s (local map=14, WM=14) [ INFO] [1672085171.905237436, 1671607343.692873002]: Assembled 1 obstacle and 1 ground clouds (28440 points, 0.010649s) [ INFO] [1672085171.906615959, 1671607343.692873002]: rtabmap (17): Rate=1.00s, Limit=0.000s, Conversion=0.0035s, RTAB-Map=0.3443s, Maps update=0.0049s pub=0.0120s (local map=15, WM=15) [ INFO] [1672085172.677761718, 1671607344.470457338]: Assembled 1 obstacle and 1 ground clouds (30004 points, 0.005349s) [ INFO] [1672085172.678650664, 1671607344.470457338]: rtabmap (18): Rate=1.00s, Limit=0.000s, Conversion=0.0016s, RTAB-Map=0.1479s, Maps update=0.0026s pub=0.0063s (local map=16, WM=16) [ INFO] [1672085173.902305069, 1671607345.669512464]: Assembled 1 obstacle and 1 ground clouds (31921 points, 0.012458s) [ INFO] [1672085173.903967593, 1671607345.669512464]: rtabmap (19): Rate=1.00s, Limit=0.000s, Conversion=0.0033s, RTAB-Map=0.3566s, Maps update=0.0047s pub=0.0141s (local map=17, WM=17) [ INFO] [1672085174.661914349, 1671607346.451419850]: Assembled 1 obstacle and 1 ground clouds (33787 points, 0.006420s) [ INFO] [1672085174.662751492, 1671607346.451419850]: rtabmap (20): Rate=1.00s, Limit=0.000s, Conversion=0.0015s, RTAB-Map=0.1309s, Maps update=0.0021s pub=0.0073s (local map=18, WM=18) [ INFO] [1672085175.900535605, 1671607347.685600594]: Assembled 1 obstacle and 1 ground clouds (35402 points, 0.006477s) [ INFO] [1672085175.901310365, 1671607347.685600594]: rtabmap (21): Rate=1.00s, Limit=0.000s, Conversion=0.0042s, RTAB-Map=0.2978s, Maps update=0.0018s pub=0.0073s (local map=19, WM=19) [ INFO] [1672085176.813359378, 1671607348.605718081]: Assembled 1 obstacle and 1 ground clouds (36559 points, 0.009783s) [ INFO] [1672085176.814727566, 1671607348.605718081]: rtabmap (22): Rate=1.00s, Limit=0.000s, Conversion=0.0027s, RTAB-Map=0.2277s, Maps update=0.0050s pub=0.0112s (local map=20, WM=20) [ INFO] [1672085177.778980863, 1671607349.557092200]: Assembled 0 obstacle and 0 ground clouds (36559 points, 0.000021s) [ INFO] [1672085177.779186553, 1671607349.557092200]: rtabmap (23): Rate=1.00s, Limit=0.000s, Conversion=0.0047s, RTAB-Map=0.1986s, Maps update=0.0037s pub=0.0002s (local map=20, WM=20) [ INFO] [1672085178.740078514, 1671607350.527600147]: Assembled 0 obstacle and 0 ground clouds (36559 points, 0.000020s) [ INFO] [1672085178.740281380, 1671607350.527600147]: rtabmap (24): Rate=1.00s, Limit=0.000s, Conversion=0.0024s, RTAB-Map=0.1725s, Maps update=0.0031s pub=0.0002s (local map=20, WM=20) [ INFO] [1672085179.887411092, 1671607351.668895622]: Assembled 1 obstacle and 1 ground clouds (37569 points, 0.015533s) [ INFO] [1672085179.889259107, 1671607351.668895622]: rtabmap (25): Rate=1.00s, Limit=0.000s, Conversion=0.0020s, RTAB-Map=0.3014s, Maps update=0.0069s pub=0.0174s (local map=21, WM=21) [ INFO] [1672085180.961439926, 1671607352.747772848]: Assembled 1 obstacle and 1 ground clouds (38621 points, 0.015954s) [ INFO] [1672085180.963240013, 1671607352.747772848]: rtabmap (26): Rate=1.00s, Limit=0.000s, Conversion=0.0045s, RTAB-Map=0.3449s, Maps update=0.0059s pub=0.0178s (local map=22, WM=22) [ INFO] [1672085181.789100661, 1671607353.576539891]: Assembled 1 obstacle and 1 ground clouds (40156 points, 0.006776s) [ INFO] [1672085181.789920538, 1671607353.576539891]: rtabmap (27): Rate=1.00s, Limit=0.000s, Conversion=0.0040s, RTAB-Map=0.2106s, Maps update=0.0019s pub=0.0076s (local map=23, WM=23) [ INFO] [1672085182.880709688, 1671607354.671541401]: Assembled 1 obstacle and 1 ground clouds (41945 points, 0.005060s) [ INFO] [1672085182.881518759, 1671607354.671541401]: rtabmap (28): Rate=1.00s, Limit=0.000s, Conversion=0.0040s, RTAB-Map=0.3036s, Maps update=0.0013s pub=0.0059s (local map=24, WM=24) [ INFO] [1672085183.765075529, 1671607355.558007860]: Assembled 1 obstacle and 1 ground clouds (44317 points, 0.013590s) [ INFO] [1672085183.766321467, 1671607355.558007860]: rtabmap (29): Rate=1.00s, Limit=0.000s, Conversion=0.0021s, RTAB-Map=0.1839s, Maps update=0.0031s pub=0.0149s (local map=25, WM=25) [ INFO] [1672085184.781322286, 1671607356.570946796]: Assembled 1 obstacle and 1 ground clouds (46123 points, 0.015989s) [ INFO] [1672085184.783252283, 1671607356.570946796]: rtabmap (30): Rate=1.00s, Limit=0.000s, Conversion=0.0019s, RTAB-Map=0.1932s, Maps update=0.0038s pub=0.0179s (local map=26, WM=26) [ INFO] [1672085185.823010572, 1671607357.615244846]: Assembled 1 obstacle and 1 ground clouds (47776 points, 0.015172s) [ INFO] [1672085185.824776329, 1671607357.615244846]: rtabmap (31): Rate=1.00s, Limit=0.000s, Conversion=0.0027s, RTAB-Map=0.2193s, Maps update=0.0039s pub=0.0169s (local map=27, WM=27) [ INFO] [1672085186.818871764, 1671607358.598912398]: Assembled 1 obstacle and 1 ground clouds (49102 points, 0.017088s) [ INFO] [1672085186.821994301, 1671607358.614195911]: rtabmap (32): Rate=1.00s, Limit=0.000s, Conversion=0.0034s, RTAB-Map=0.2123s, Maps update=0.0033s pub=0.0202s (local map=28, WM=28) [ INFO] [1672085187.674891590, 1671607359.459863750]: Assembled 0 obstacle and 0 ground clouds (49102 points, 0.000022s) [ INFO] [1672085187.675098944, 1671607359.459863750]: rtabmap (33): Rate=1.00s, Limit=0.000s, Conversion=0.0017s, RTAB-Map=0.0992s, Maps update=0.0017s pub=0.0002s (local map=28, WM=28) [ INFO] [1672085188.723197049, 1671607360.514604766]: Assembled 0 obstacle and 0 ground clouds (49102 points, 0.000025s) [ INFO] [1672085188.723318539, 1671607360.514604766]: rtabmap (34): Rate=1.00s, Limit=0.000s, Conversion=0.0018s, RTAB-Map=0.1275s, Maps update=0.0024s pub=0.0002s (local map=28, WM=28) [ INFO] [1672085189.680629017, 1671607361.467686535]: Assembled 0 obstacle and 0 ground clouds (49102 points, 0.000018s) [ INFO] [1672085189.680748647, 1671607361.467686535]: rtabmap (35): Rate=1.00s, Limit=0.000s, Conversion=0.0018s, RTAB-Map=0.1100s, Maps update=0.0020s pub=0.0001s (local map=28, WM=28) ^C[apriltag_ros_continuous_node-11] killing on exit [rviz-10] killing on exit [robot_state_publisher-9] killing on exit [joint_state_publisher-8] killing on exit [rtabmap/rtabmap-7] killing on exit [base_to_vlp16_tf-6] killing on exit [pose_to_base_tf-5] killing on exit [base_to_d415_tf-4] killing on exit [base_to_t265_tf-3] killing on exit [base_to_d435_2_tf-2] killing on exit [base_to_d435_1_tf-1] killing on exit rtabmap: Saving database/long-term memory... rtabmap: Saving database/long-term memory...done!
This is the tf_echo output:
At time 1671607328.118
- Translation: [3.562, -0.384, 1.396]
- Rotation: in Quaternion [0.518, -0.503, -0.478, 0.500]
in RPY (radian) [1.615, -0.008, -1.534]
in RPY (degree) [92.510, -0.443, -87.917]
At time 1671607329.058
- Translation: [3.584, -0.360, 1.392]
- Rotation: in Quaternion [0.526, -0.513, -0.469, 0.491]
in RPY (radian) [1.650, -0.010, -1.536]
in RPY (degree) [94.534, -0.600, -87.996]
At time 1671607330.066
- Translation: [3.713, -0.046, 1.391]
- Rotation: in Quaternion [0.570, -0.476, -0.422, 0.520]
in RPY (radian) [1.674, -0.014, -1.379]
in RPY (degree) [95.898, -0.808, -79.001]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607330.537
- Translation: [3.766, 0.279, 1.389]
- Rotation: in Quaternion [0.604, -0.437, -0.377, 0.550]
in RPY (radian) [1.681, -0.026, -1.230]
in RPY (degree) [96.336, -1.487, -70.479]
At time 1671607356.168
- Translation: [2.952, -0.764, 1.375]
- Rotation: in Quaternion [-0.504, 0.538, 0.489, -0.466]
in RPY (radian) [1.659, -0.008, -1.627]
in RPY (degree) [95.032, -0.483, -93.230]
At time 1671607357.104
- Translation: [3.400, -0.445, 1.385]
- Rotation: in Quaternion [0.519, -0.500, -0.479, 0.502]
in RPY (radian) [1.609, -0.004, -1.528]
in RPY (degree) [92.186, -0.227, -87.573]
At time 1671607358.173
- Translation: [3.780, -0.287, 1.386]
- Rotation: in Quaternion [-0.484, 0.624, 0.504, -0.349]
in RPY (radian) [1.822, 0.053, -1.863]
in RPY (degree) [104.386, 3.013, -106.765]
At time 1671607359.141
- Translation: [3.898, -0.240, 1.384]
- Rotation: in Quaternion [0.536, -0.477, -0.459, 0.524]
in RPY (radian) [1.601, -0.008, -1.448]
in RPY (degree) [91.721, -0.444, -82.959]
At time 1671607360.144
- Translation: [3.899, -0.240, 1.385]
- Rotation: in Quaternion [0.528, -0.483, -0.471, 0.516]
in RPY (radian) [1.595, -0.001, -1.479]
in RPY (degree) [91.374, -0.071, -84.760]
At time 1671607361.114
- Translation: [3.896, -0.240, 1.384]
- Rotation: in Quaternion [0.532, -0.476, -0.465, 0.524]
in RPY (radian) [1.589, -0.003, -1.456]
in RPY (degree) [91.016, -0.196, -83.422]
Even if I see the tags in rviz and they are published correctly according to tf_echo, they don't get added to the map because no green links show up in the occupancy grid map.
| Free forum by Nabble | Edit this page |