Re: Localization after mapping session using lidar only
Posted by Bracky on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localization-after-mapping-session-using-lidar-only-tp9260p9290.html
Hello Matthieu,
I Actually do not know the proper behavior of the tf map->odom but it is shaking and drifting and I hoped the lidar odometry to correct that. I do not know if the odom is poor because of the bad results from icp or if icp cannot provides good results because of crappy odom.
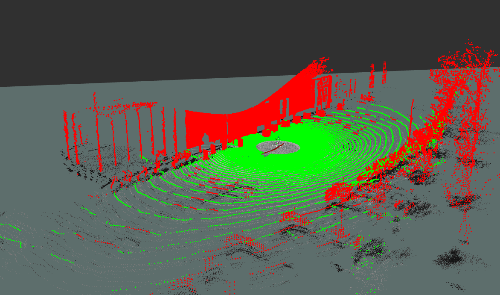
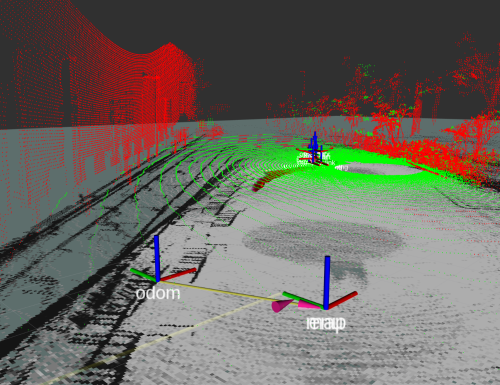
The point cloud is fine, but the occupancy grid etc are not. Is it because of an error in map -> odom ? Do you have clues where I should look into ?
Thank you as always for your availability and help ;)
UPDATE : changed for point to plane -> solved most of my pbm
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localization-after-mapping-session-using-lidar-only-tp9260p9290.html
Hello Matthieu,
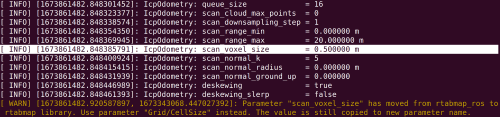
So I tried filtering the distance (20m) and replaced my ICP/VoxelSize with scan_voxel_size but still have the warning issue and the size being 0.05 instead of 0.5.
[ WARN] (2023-01-16 10:28:00.561) util3d_filtering.cpp:539::voxelizeImpl() Leaf size is too small for the input dataset. Integer indices would overflow. We will split space to be able to voxelize (lvl=0 cloud=131072 min=[-109.331596 -99.119019 -1.479200] max=[77.939636 46.475895 15.413268] voxel=0.050000).However, this message does not appear in rqt_console (tools that I did not know the existence of, thanks for the tip !!) .
Yes I have done the remap (in cmr_lidarloop) but my point is that whether I use cmr_lidarloop or not, I always have the same issue which is that my point cloud remains in the working memory and that there is nothing in the local map :
[ INFO] [1673858543.918015586, 1673343087.419828279]: Assembled 1 obstacle and 1 ground clouds (59294 points, 0.004693s) [ INFO] [1673858543.938769094, 1673343087.419828279]: rtabmap (9): Rate=0.20s, Limit=0.000s, Conversion=0.0018s, RTAB-Map=1.4808s, Maps update=1.4485s pub=0.0254s (local map=0, WM=9)My bet is that I have a poorly tuned parameter. But maybe it is because the odometry is not so good. I used gps+ imu + rtamap in my robot_localization setup.
I Actually do not know the proper behavior of the tf map->odom but it is shaking and drifting and I hoped the lidar odometry to correct that. I do not know if the odom is poor because of the bad results from icp or if icp cannot provides good results because of crappy odom.
The point cloud is fine, but the occupancy grid etc are not. Is it because of an error in map -> odom ? Do you have clues where I should look into ?
So I am on Ubuntu 20.04, ros noetic, rtabmap 0.20.22 and the latest rtabmap_ros. For the floam I did the following :
cd ~/catkin_ws/src
git clone https://github.com/wh200720041/floam && \
cd floam && \
wget https://gist.githubusercontent.com/matlabbe/d8ab56e69146c18afbd1a3b05444c649/raw/f1f37ece5d5787c77f008cb89e9446fc20a40c1f/floam_as_library_support.patch && \
git apply floam_as_library_support.patch
cd ../..
catkin_make
Thank you as always for your availability and help ;)
UPDATE : changed for point to plane -> solved most of my pbm
| Free forum by Nabble | Edit this page |