Re: RTAB-Map stereo odometry inaccurate with ZED2i vs ZED
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-stereo-odometry-inaccurate-with-ZED2i-vs-ZED-tp9316p9329.html
Hi,
I tested the two bags like this:
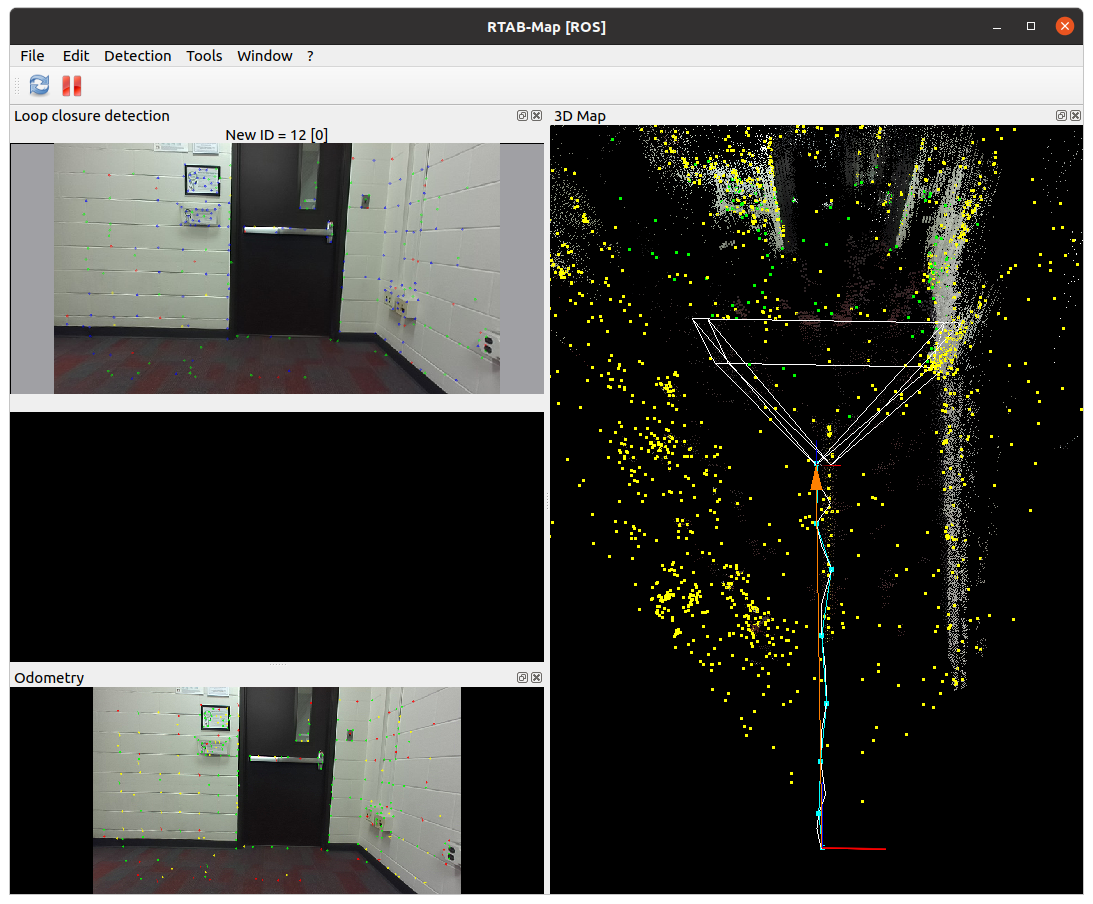
zed:
zed2i:
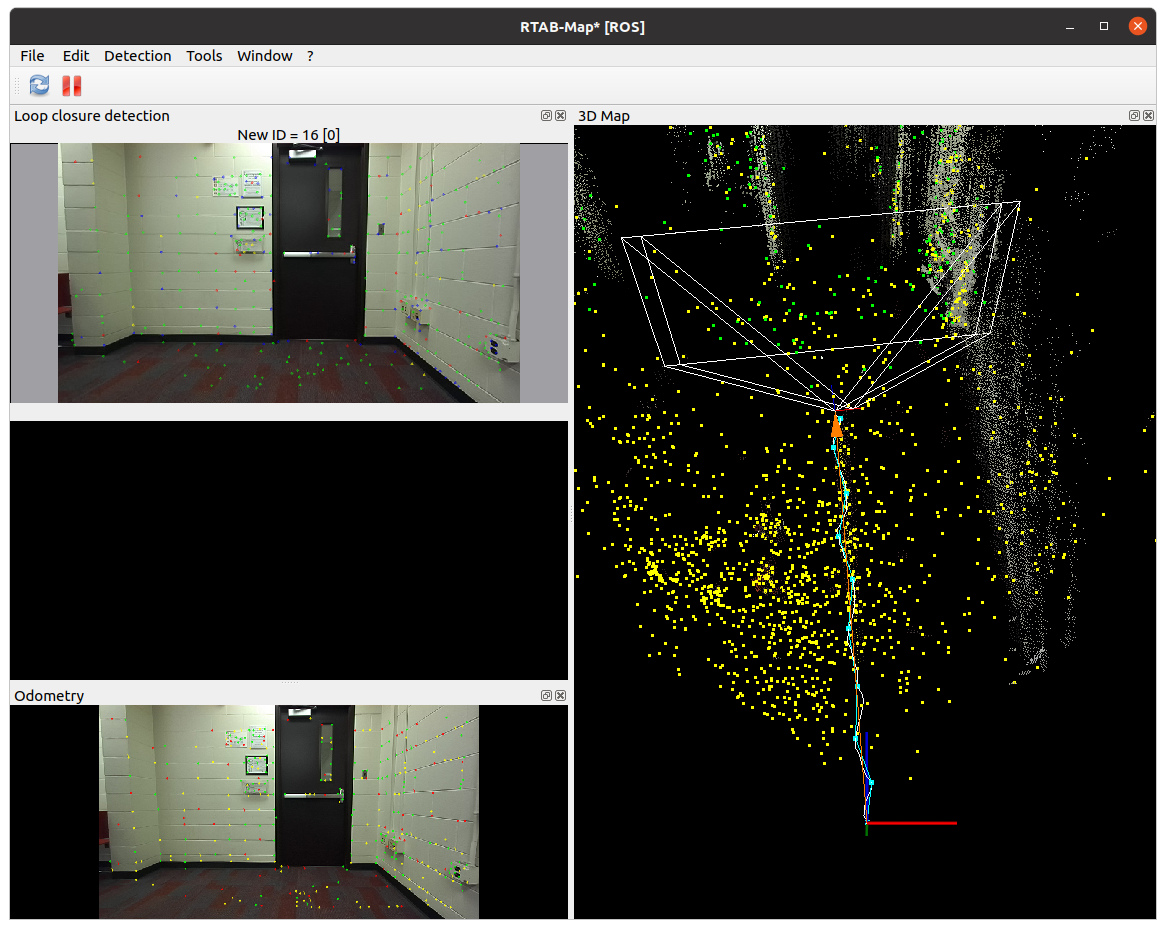
Both trajectories look similar, however the framerate on zed is too slow for visual odometry (only 2 Hz), while zed2i is 10 Hz (not so bad but it could be faster).
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-stereo-odometry-inaccurate-with-ZED2i-vs-ZED-tp9316p9329.html
Hi,
I tested the two bags like this:
zed:
rosbag info zed_rtabmap_vo.bag
path: zed_rtabmap_vo.bag
version: 2.0
duration: 13.6s
start: Jan 31 2023 16:45:29.30 (1675212329.30)
end: Jan 31 2023 16:45:42.87 (1675212342.87)
size: 40.5 MB
messages: 161
compression: none [46/46 chunks]
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /tf 23 msgs : tf2_msgs/TFMessage
/zed_node/left/camera_info 46 msgs : sensor_msgs/CameraInfo
/zed_node/left/image_rect_color 23 msgs : sensor_msgs/Image
/zed_node/right/camera_info 46 msgs : sensor_msgs/CameraInfo
/zed_node/right/image_rect_color 23 msgs : sensor_msgs/Image
roslaunch rtabmap_ros rtabmap.launch \
args:="-d" \
stereo:=true \
left_image_topic:=/zed_node/left/image_rect_color \
left_camera_info_topic:=/zed_node/left/camera_info \
right_image_topic:=/zed_node/right/image_rect_color \
right_camera_info_topic:=/zed_node/right/camera_info \
use_sim_time:=true \
frame_id:=zed_left_camera_optical_frame
rosbag play --clock zed_rtabmap_vo.bag
zed2i:
rosbag info zed2i_rtabmap_vo.bag
path: zed2i_rtabmap_vo.bag
version: 2.0
duration: 16.4s
start: Jan 31 2023 16:40:19.12 (1675212019.12)
end: Jan 31 2023 16:40:35.50 (1675212035.50)
size: 140.9 MB
messages: 642
compression: none [161/161 chunks]
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /tf 162 msgs : tf2_msgs/TFMessage (2 connections)
/zed_node/left/camera_info 160 msgs : sensor_msgs/CameraInfo
/zed_node/left/image_rect_color 80 msgs : sensor_msgs/Image
/zed_node/right/camera_info 160 msgs : sensor_msgs/CameraInfo
/zed_node/right/image_rect_color 80 msgs : sensor_msgs/Image
roslaunch rtabmap_ros rtabmap.launch \
args:="-d" \
stereo:=true \
left_image_topic:=/zed_node/left/image_rect_color \
left_camera_info_topic:=/zed_node/left/camera_info \
right_image_topic:=/zed_node/right/image_rect_color \
right_camera_info_topic:=/zed_node/right/camera_info \
use_sim_time:=true \
frame_id:=zed2i_left_camera_optical_frame
rosbag play --clock zed2i_rtabmap_vo.bag
Both trajectories look similar, however the framerate on zed is too slow for visual odometry (only 2 Hz), while zed2i is 10 Hz (not so bad but it could be faster).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |