Re: Differences between ROS output vs. desktop
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Differences-between-ROS-output-vs-desktop-tp9333p9334.html
Hi,
after investigating the results, it seems in ROS2 you are not subscribing to a rectified RGB image. Following ROS1 suggestions from my pull request here: https://github.com/microsoft/Azure_Kinect_ROS_Driver/pull/166
here is the corresponding ROS2 version for RGB+Depth:
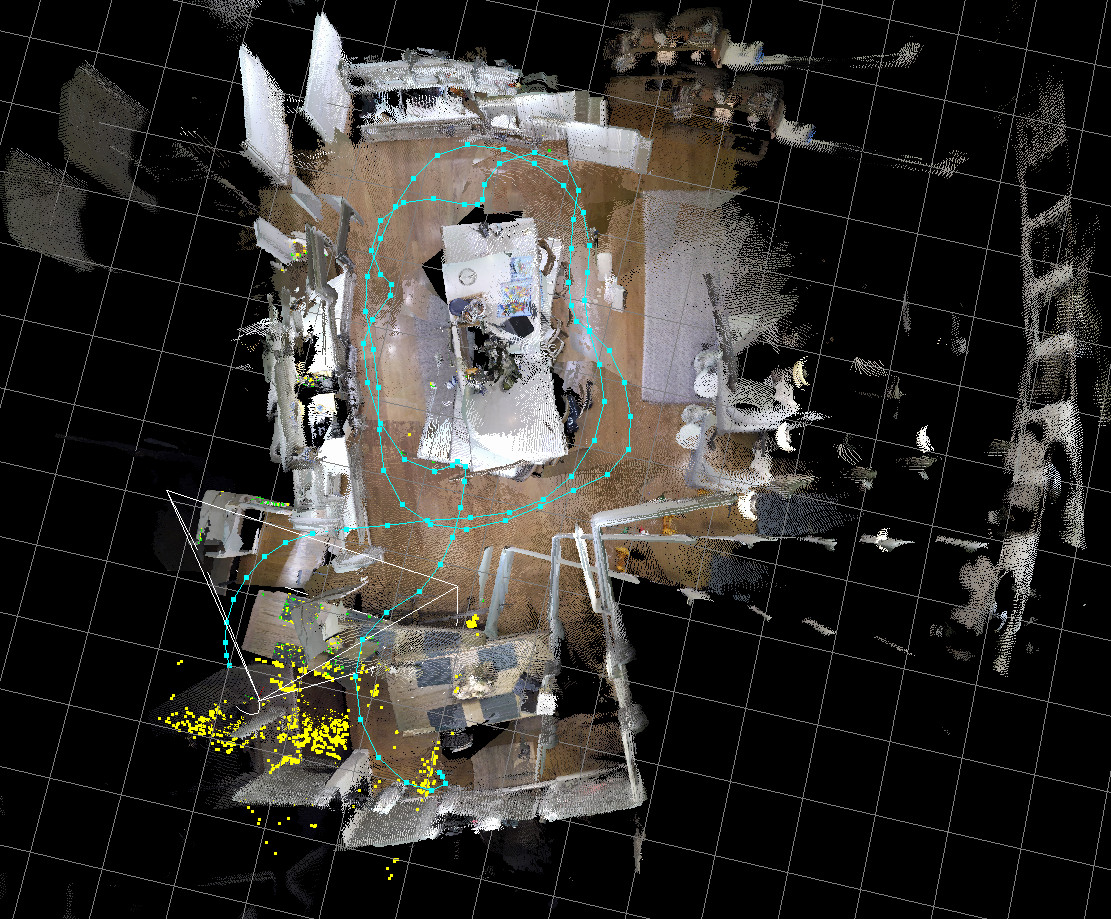
When showing the graph without loop closures, it is easier to see that when using raw RGB images, the visual odometry is drifting a lot:
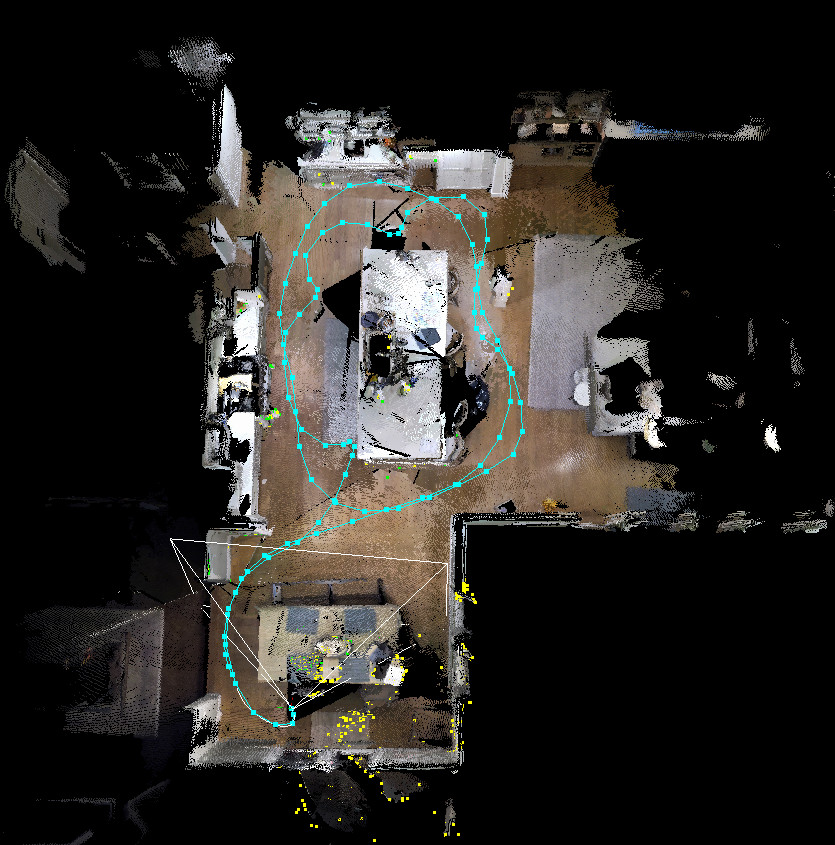
This is visual odometry with rectified RGB images:

This is with rectified RGB and with loop closures (results very similar to RTAB-Map standalone):
EDIT: Thank you for the patch, I integrated it in this commit: https://github.com/introlab/rtabmap/commit/59d220c54f58c66f3d11484176003ba89ef6bdf5
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Differences-between-ROS-output-vs-desktop-tp9333p9334.html
Hi,
after investigating the results, it seems in ROS2 you are not subscribing to a rectified RGB image. Following ROS1 suggestions from my pull request here: https://github.com/microsoft/Azure_Kinect_ROS_Driver/pull/166
here is the corresponding ROS2 version for RGB+Depth:
# compute quaternion of the raw /imu
ros2 run imu_filter_madgwick imu_filter_madgwick_node --ros-args \
-r /imu/data_raw:=/imu \
-p use_mag:=false \
-p publish_tf:=false
# Rectify RGB image /rgb/image_raw -> /rgb/image_rect
ros2 run image_proc image_proc --ros-args \
-r camera_info:=/rgb/camera_info \
-r image:=/rgb/image_raw \
-r image_rect:=/rgb/image_rect
# RTAB-Map
ros2 launch rtabmap_launch rtabmap.launch.py \
rtabmap_args:="--delete_db_on_start" \
rgb_topic:=/rgb/image_rect \
depth_topic:=/depth_to_rgb/image_raw \
camera_info_topic:=/rgb/camera_info \
frame_id:=camera_base \
approx_sync:=true \
approx_sync_max_interval:=0.1 \
wait_imu_to_init:=true \
imu_topic:=/imu/data \
qos:=1 \
queue_size:=30
# Launch the MKV
ros2 run azure_kinect_ros_driver node --ros-args \
-p recording_file:=kitchen_loop19_tilt30_720p_30fps_wfov.mkv \
-p color_enabled:=true \
-p fps:=30 \
-p depth_mode:=WFOV_2X2BINNED
When showing the graph without loop closures, it is easier to see that when using raw RGB images, the visual odometry is drifting a lot:
This is visual odometry with rectified RGB images:
This is with rectified RGB and with loop closures (results very similar to RTAB-Map standalone):
EDIT: Thank you for the patch, I integrated it in this commit: https://github.com/introlab/rtabmap/commit/59d220c54f58c66f3d11484176003ba89ef6bdf5
cheers,
Mathieu
| Free forum by Nabble | Edit this page |