Loop closure without depth information
Posted by derektan1995 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Loop-closure-without-depth-information-tp9339.html
Hi Mathieu,
Is it possible to obtain loop closure using purely RGB inputs?
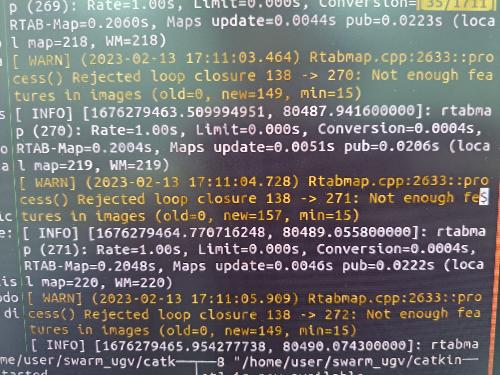
I am currently localizing my robot via lidar pointcloud. I have tried setting both the 'subscribe_depth' and 'subscribe_rgbd' params to false. While it seemed like rtabmap will still work, no loop closures could be detected. All old images stored in memories seem to have 0 features, as seen below.
Warm Regards,
Derek
URL: http://official-rtab-map-forum.206.s1.nabble.com/Loop-closure-without-depth-information-tp9339.html
Hi Mathieu,
Is it possible to obtain loop closure using purely RGB inputs?
I am currently localizing my robot via lidar pointcloud. I have tried setting both the 'subscribe_depth' and 'subscribe_rgbd' params to false. While it seemed like rtabmap will still work, no loop closures could be detected. All old images stored in memories seem to have 0 features, as seen below.
Warm Regards,
Derek
| Free forum by Nabble | Edit this page |