Re: Velodyne with ROS2 launch file
Posted by Rodolfo on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Velodyne-with-ROS2-launch-file-tp9313p9349.html
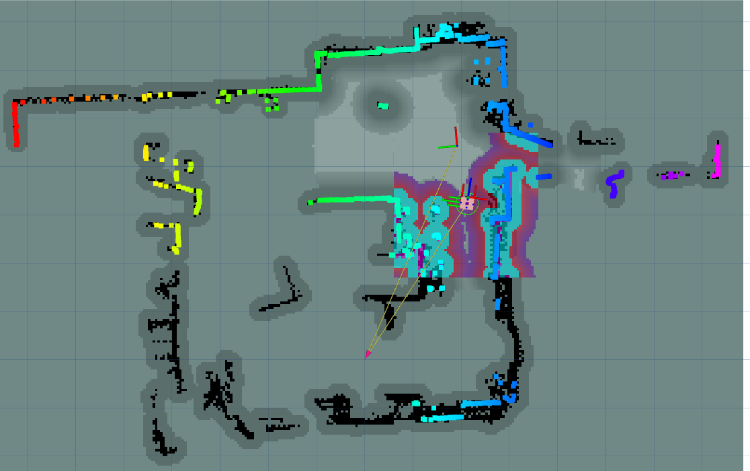
We got it working but had to turn off the deskewing. At this time the Velodyne lidar is the only sensor on this robot. It maps quite well.
Now I have a question about the localization. You see in the map, that the robot odometry and the lidar aren't together. Is it possible to feed the ICP odom from Rtabmap into Robot Localization node, and fuse this with wheel odometry and IMU? I tried it once but it crashed the RL node.
The robot base is Linorobot2 and I'm using Nav2 and Humble. I'm running Rtabmap on the robot without the rtabmapviz node. The host runs complete Nav2 stack and Rviz2.
The Gazebo sim works well but the real robot does this, as shown in graphic.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Velodyne-with-ROS2-launch-file-tp9313p9349.html
We got it working but had to turn off the deskewing. At this time the Velodyne lidar is the only sensor on this robot. It maps quite well.
Now I have a question about the localization. You see in the map, that the robot odometry and the lidar aren't together. Is it possible to feed the ICP odom from Rtabmap into Robot Localization node, and fuse this with wheel odometry and IMU? I tried it once but it crashed the RL node.
The robot base is Linorobot2 and I'm using Nav2 and Humble. I'm running Rtabmap on the robot without the rtabmapviz node. The host runs complete Nav2 stack and Rviz2.
The Gazebo sim works well but the real robot does this, as shown in graphic.
| Free forum by Nabble | Edit this page |