Re: Modifying parameters in ROS 2
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Modifying-parameters-in-ROS-2-tp9370p9379.html
rtabmap's vo with imu is not a tightly VIO approach, and it won't do dead-reckoning without camera.
rtabmap_args is not defined in realsense_d435i_stereo.launch.py, did you add it? Otherwise, you coudl add in parameters here:
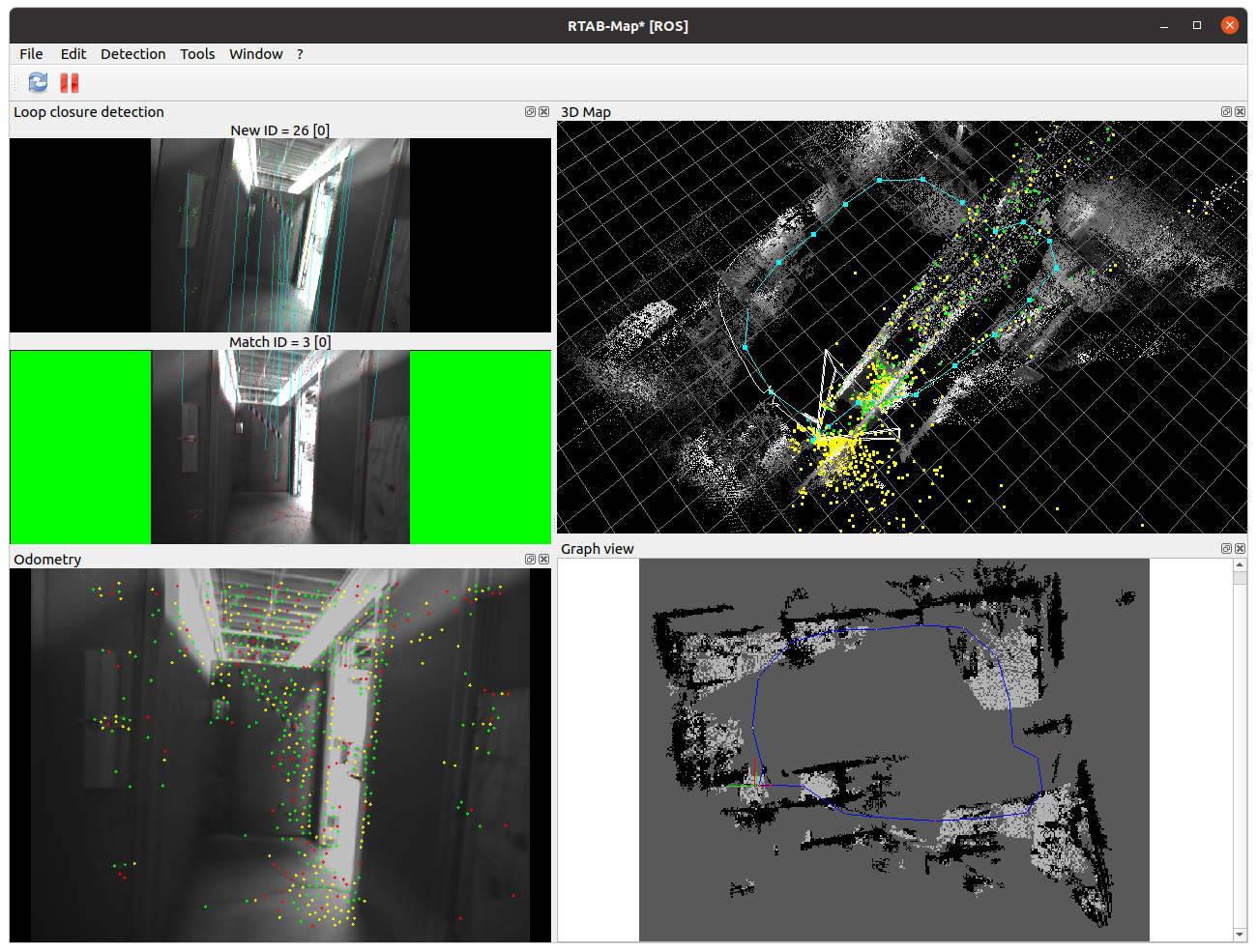
Here example with your bag with Vis/MinInliers=5:
For fun, you may compare with F2F odom :
My computer could compute vo faster than 30 Hz, but the bag is only 15 Hz. With 30 Hz framerate, it may make it less difficult for VO algorithms to estimate fast motions in featureless sections of that kind of trajectory.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Modifying-parameters-in-ROS-2-tp9370p9379.html
rtabmap's vo with imu is not a tightly VIO approach, and it won't do dead-reckoning without camera.
rtabmap_args is not defined in realsense_d435i_stereo.launch.py, did you add it? Otherwise, you coudl add in parameters here:
parameters=[{
'frame_id':'camera_link',
'subscribe_stereo':True,
'subscribe_odom_info':True,
'wait_imu_to_init':True,
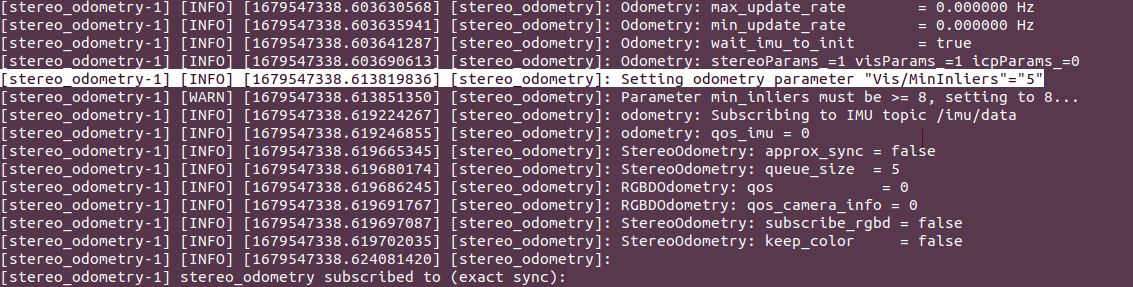
'Vis/MinInliers': '5',
'Rtabmap/DetectionRate', '2'
}]
Note that rtabmap's library parameters should have "string" values. This is how you will know that the parameters are set, looking at the initialization output log:
Here example with your bag with Vis/MinInliers=5:
For fun, you may compare with F2F odom :
'Odom/Strategy':'1', 'Vis/CorType': '1', 'Odom/KeyFrameThr': '0.6'
My computer could compute vo faster than 30 Hz, but the bag is only 15 Hz. With 30 Hz framerate, it may make it less difficult for VO algorithms to estimate fast motions in featureless sections of that kind of trajectory.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |