Can I use a bag taken using zed2i? (I used compression.)
Posted by beginner123 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Can-I-use-a-bag-taken-using-zed2i-I-used-compression-tp9395.html
hello! Sorry for always asking questions.
The bag recorded using realsense can be used in rtabmap, but I want to use the bag newly recorded using zed2i in rtabmap.launch, but it does not work. Below is my error.
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/left/image_rect_color/compressed depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data
... logging to /home/minsoo/.ros/log/9a0bc0d6-d3c3-11ed-9ac7-8ffbb74ea8ab/roslaunch-chominsoo-37587.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://chominsoo:33895/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rgbd_odometry/
* /rtabmap/rtabmap/
* /rtabmap/rtabmapviz/
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.15
* /rtabmap/rgbd_odometry/approx_sync: False
* /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: False
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_rgb: True
* /rtabmap/rtabmapviz/subscribe_rgbd: False
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_scan_descriptor: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rgbd_odometry-1]: started with pid [37607]
process[rtabmap/rtabmap-2]: started with pid [37608]
process[rtabmap/rtabmapviz-3]: started with pid [37609]
[ INFO] [1680717220.083015836]: Starting node...
[ INFO] [1680717220.100167566]: Initializing nodelet with 6 worker threads.
[ INFO] [1680717220.104406169]: Initializing nodelet with 6 worker threads.
[ INFO] [1680717220.143230866]: Odometry: frame_id = camera_link
[ INFO] [1680717220.143258317]: Odometry: odom_frame_id = odom
[ INFO] [1680717220.143271271]: Odometry: publish_tf = true
[ INFO] [1680717220.143283253]: Odometry: wait_for_transform = true
[ INFO] [1680717220.143301777]: Odometry: wait_for_transform_duration = 0.200000
[ INFO] [1680717220.143314361]: Odometry: log_to_rosout_level = 4
[ INFO] [1680717220.143341131]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] [1680717220.143353754]: Odometry: ground_truth_frame_id =
[ INFO] [1680717220.143365376]: Odometry: ground_truth_base_frame_id =
[ INFO] [1680717220.143376967]: Odometry: config_path =
[ INFO] [1680717220.143388569]: Odometry: publish_null_when_lost = true
[ INFO] [1680717220.143399670]: Odometry: guess_frame_id =
[ INFO] [1680717220.143411471]: Odometry: guess_min_translation = 0.000000
[ INFO] [1680717220.143423514]: Odometry: guess_min_rotation = 0.000000
[ INFO] [1680717220.143436318]: Odometry: guess_min_time = 0.000000
[ INFO] [1680717220.143448180]: Odometry: expected_update_rate = 0.000000 Hz
[ INFO] [1680717220.143460032]: Odometry: max_update_rate = 0.000000 Hz
[ INFO] [1680717220.143471784]: Odometry: min_update_rate = 0.000000 Hz
[ INFO] [1680717220.143483205]: Odometry: wait_imu_to_init = false
[ INFO] [1680717220.143506318]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0
[ INFO] [1680717220.158928300]: Starting node...
[ INFO] [1680717220.187731899]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1680717220.187768637]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1680717220.187784767]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1680717220.187799214]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1680717220.187813330]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1680717220.187827296]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1680717220.187856240]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1680717220.187871429]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1680717220.188157230]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1680717220.216558681]: rtabmap: frame_id = camera_link
[ INFO] [1680717220.216618413]: rtabmap: map_frame_id = map
[ INFO] [1680717220.216659870]: rtabmap: log_to_rosout_level = 4
[ INFO] [1680717220.216703511]: rtabmap: initial_pose =
[ INFO] [1680717220.216743315]: rtabmap: use_action_for_goal = false
[ INFO] [1680717220.216784822]: rtabmap: tf_delay = 0.050000
[ INFO] [1680717220.216825187]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1680717220.216863809]: rtabmap: odom_sensor_sync = false
[ INFO] [1680717220.217788930]: rtabmap: gen_scan = false
[ INFO] [1680717220.217841367]: rtabmap: gen_depth = false
[ INFO] [1680717220.315254388]: rtabmapviz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini"
[ INFO] [1680717220.422601924]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1680717220.422922050]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1680717220.566819302]: RGBDOdometry: approx_sync = false
[ INFO] [1680717220.566841554]: RGBDOdometry: queue_size = 10
[ INFO] [1680717220.566852785]: RGBDOdometry: subscribe_rgbd = false
[ INFO] [1680717220.566863124]: RGBDOdometry: rgbd_cameras = 1
[ INFO] [1680717220.566876258]: RGBDOdometry: keep_color = false
[ WARN] [1680717220.570413918]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717220.579472235]:
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ INFO] [1680717220.682460634]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1680717220.682805595]: rtabmap: Deleted database "/home/minsoo/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1680717220.682847063]: rtabmap: Using database from "/home/minsoo/.ros/rtabmap.db" (0 MB).
[ INFO] [1680717220.826390818]: rtabmap: Database version = "0.20.23".
[ INFO] [1680717220.826423148]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
[ INFO] [1680717220.840330012]: /rtabmap/rtabmap: subscribe_depth = true
[ INFO] [1680717220.840355309]: /rtabmap/rtabmap: subscribe_rgb = true
[ INFO] [1680717220.840369134]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1680717220.840383151]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1680717220.840397988]: /rtabmap/rtabmap: subscribe_odom_info = true
[ INFO] [1680717220.840411183]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1680717220.840424578]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1680717220.840439295]: /rtabmap/rtabmap: subscribe_scan_cloud = false
[ INFO] [1680717220.840455144]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1680717220.840467848]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1680717220.840480602]: /rtabmap/rtabmap: approx_sync = false
[ INFO] [1680717220.840503625]: Setup depth callback
[ WARN] [1680717220.843662891]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717220.876645071]:
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ INFO] [1680717220.948194611]: rtabmap 0.20.23 started...
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1680717221.153764272]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1680717221.285350640]: rtabmapviz: Parameters read = 359
[ INFO] [1680717221.285374384]: rtabmapviz: Parameters successfully read.
[ INFO] [1680717221.567339808]: /rtabmap/rtabmapviz: subscribe_depth = true
[ INFO] [1680717221.567364614]: /rtabmap/rtabmapviz: subscribe_rgb = true
[ INFO] [1680717221.567375174]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1680717221.567386044]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1680717221.567396644]: /rtabmap/rtabmapviz: subscribe_odom_info = true
[ INFO] [1680717221.567409087]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1680717221.567418805]: /rtabmap/rtabmapviz: subscribe_scan = false
[ INFO] [1680717221.567429695]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false
[ INFO] [1680717221.567443231]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1680717221.567454021]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1680717221.567464200]: /rtabmap/rtabmapviz: approx_sync = false
[ INFO] [1680717221.567490759]: Setup depth callback
[ WARN] [1680717221.586636597]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717221.616280048]:
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ INFO] [1680717221.616382418]: rtabmapviz started.
[ WARN] [1680717228.613786654, 1680143339.556442282]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717228.613933747, 1680143339.556442282]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717228.613955578, 1680143339.556442282]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717233.613834677, 1680143344.556560696]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717233.613859423, 1680143344.556560696]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717233.614639424, 1680143344.556560696]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717238.620441742, 1680143349.563269350]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717238.620979391, 1680143349.563269350]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
I want to use only compressed bags. What should I do? This is my bag file.
rosbag info my_bag_record4_2023-03-30-11-28-54.bag
path: my_bag_record4_2023-03-30-11-28-54.bag
version: 2.0
duration: 5:22s (322s)
start: Mar 30 2023 11:28:54.55 (1680143334.55)
end: Mar 30 2023 11:34:16.89 (1680143656.89)
size: 6.7 GB
messages: 126521
compression: none [5138/5138 chunks]
types: geometry_msgs/PoseStamped [d3812c3cbc69362b77dc0b19b345f8f5]
nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7]
sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/CompressedImage [8f7a12909da2c9d3332d540a0977563f]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /ouster/imu 32232 msgs : sensor_msgs/Imu
/ouster/points 3224 msgs : sensor_msgs/PointCloud2
/tf_static 2 msgs : tf2_msgs/TFMessage (2 connections)
/zed2i/zed_node/depth/camera_info 1914 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/depth/depth_registered 1914 msgs : sensor_msgs/Image
/zed2i/zed_node/depth/depth_registered/compressedDepth 1914 msgs : sensor_msgs/CompressedImage
/zed2i/zed_node/imu/data 64172 msgs : sensor_msgs/Imu
/zed2i/zed_node/left/camera_info 3828 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/left/image_rect_color/compressed 1914 msgs : sensor_msgs/CompressedImage
/zed2i/zed_node/odom 4834 msgs : nav_msgs/Odometry
/zed2i/zed_node/pose 4834 msgs : geometry_msgs/PoseStamped
/zed2i/zed_node/right/camera_info 3826 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/right/image_rect_color/compressed 1913 msgs : sensor_msgs/CompressedImage
-------------------------------------------------------------------------------------
topic hz
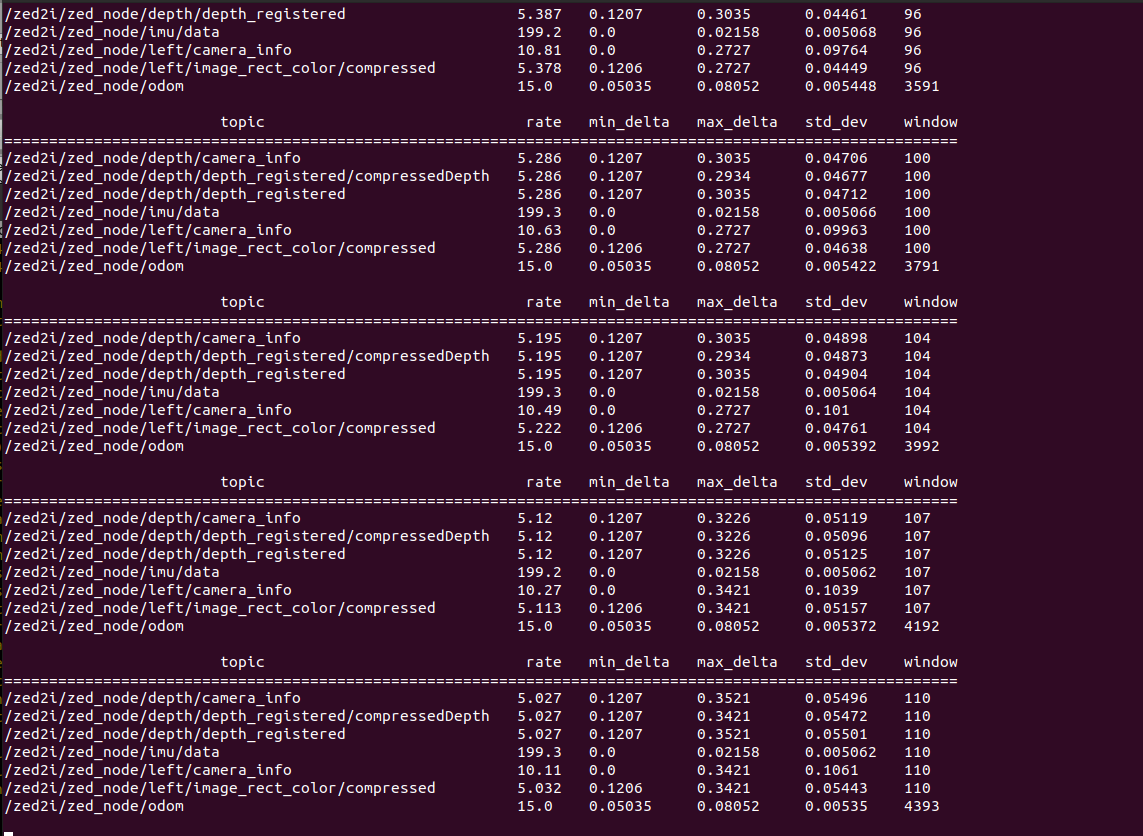
------------------------------------------------------------------------------------
Bag file information if you need more! Please tell me how to upload bag file.
thank you
URL: http://official-rtab-map-forum.206.s1.nabble.com/Can-I-use-a-bag-taken-using-zed2i-I-used-compression-tp9395.html
hello! Sorry for always asking questions.
The bag recorded using realsense can be used in rtabmap, but I want to use the bag newly recorded using zed2i in rtabmap.launch, but it does not work. Below is my error.
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/left/image_rect_color/compressed depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data
... logging to /home/minsoo/.ros/log/9a0bc0d6-d3c3-11ed-9ac7-8ffbb74ea8ab/roslaunch-chominsoo-37587.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://chominsoo:33895/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rgbd_odometry/
* /rtabmap/rtabmap/
* /rtabmap/rtabmapviz/
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.15
* /rtabmap/rgbd_odometry/approx_sync: False
* /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: False
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_rgb: True
* /rtabmap/rtabmapviz/subscribe_rgbd: False
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_scan_descriptor: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rgbd_odometry-1]: started with pid [37607]
process[rtabmap/rtabmap-2]: started with pid [37608]
process[rtabmap/rtabmapviz-3]: started with pid [37609]
[ INFO] [1680717220.083015836]: Starting node...
[ INFO] [1680717220.100167566]: Initializing nodelet with 6 worker threads.
[ INFO] [1680717220.104406169]: Initializing nodelet with 6 worker threads.
[ INFO] [1680717220.143230866]: Odometry: frame_id = camera_link
[ INFO] [1680717220.143258317]: Odometry: odom_frame_id = odom
[ INFO] [1680717220.143271271]: Odometry: publish_tf = true
[ INFO] [1680717220.143283253]: Odometry: wait_for_transform = true
[ INFO] [1680717220.143301777]: Odometry: wait_for_transform_duration = 0.200000
[ INFO] [1680717220.143314361]: Odometry: log_to_rosout_level = 4
[ INFO] [1680717220.143341131]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] [1680717220.143353754]: Odometry: ground_truth_frame_id =
[ INFO] [1680717220.143365376]: Odometry: ground_truth_base_frame_id =
[ INFO] [1680717220.143376967]: Odometry: config_path =
[ INFO] [1680717220.143388569]: Odometry: publish_null_when_lost = true
[ INFO] [1680717220.143399670]: Odometry: guess_frame_id =
[ INFO] [1680717220.143411471]: Odometry: guess_min_translation = 0.000000
[ INFO] [1680717220.143423514]: Odometry: guess_min_rotation = 0.000000
[ INFO] [1680717220.143436318]: Odometry: guess_min_time = 0.000000
[ INFO] [1680717220.143448180]: Odometry: expected_update_rate = 0.000000 Hz
[ INFO] [1680717220.143460032]: Odometry: max_update_rate = 0.000000 Hz
[ INFO] [1680717220.143471784]: Odometry: min_update_rate = 0.000000 Hz
[ INFO] [1680717220.143483205]: Odometry: wait_imu_to_init = false
[ INFO] [1680717220.143506318]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0
[ INFO] [1680717220.158928300]: Starting node...
[ INFO] [1680717220.187731899]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1680717220.187768637]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1680717220.187784767]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1680717220.187799214]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1680717220.187813330]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1680717220.187827296]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1680717220.187856240]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1680717220.187871429]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1680717220.188157230]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1680717220.216558681]: rtabmap: frame_id = camera_link
[ INFO] [1680717220.216618413]: rtabmap: map_frame_id = map
[ INFO] [1680717220.216659870]: rtabmap: log_to_rosout_level = 4
[ INFO] [1680717220.216703511]: rtabmap: initial_pose =
[ INFO] [1680717220.216743315]: rtabmap: use_action_for_goal = false
[ INFO] [1680717220.216784822]: rtabmap: tf_delay = 0.050000
[ INFO] [1680717220.216825187]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1680717220.216863809]: rtabmap: odom_sensor_sync = false
[ INFO] [1680717220.217788930]: rtabmap: gen_scan = false
[ INFO] [1680717220.217841367]: rtabmap: gen_depth = false
[ INFO] [1680717220.315254388]: rtabmapviz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini"
[ INFO] [1680717220.422601924]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1680717220.422922050]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1680717220.566819302]: RGBDOdometry: approx_sync = false
[ INFO] [1680717220.566841554]: RGBDOdometry: queue_size = 10
[ INFO] [1680717220.566852785]: RGBDOdometry: subscribe_rgbd = false
[ INFO] [1680717220.566863124]: RGBDOdometry: rgbd_cameras = 1
[ INFO] [1680717220.566876258]: RGBDOdometry: keep_color = false
[ WARN] [1680717220.570413918]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717220.579472235]:
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ INFO] [1680717220.682460634]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1680717220.682805595]: rtabmap: Deleted database "/home/minsoo/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1680717220.682847063]: rtabmap: Using database from "/home/minsoo/.ros/rtabmap.db" (0 MB).
[ INFO] [1680717220.826390818]: rtabmap: Database version = "0.20.23".
[ INFO] [1680717220.826423148]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
[ INFO] [1680717220.840330012]: /rtabmap/rtabmap: subscribe_depth = true
[ INFO] [1680717220.840355309]: /rtabmap/rtabmap: subscribe_rgb = true
[ INFO] [1680717220.840369134]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1680717220.840383151]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1680717220.840397988]: /rtabmap/rtabmap: subscribe_odom_info = true
[ INFO] [1680717220.840411183]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1680717220.840424578]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1680717220.840439295]: /rtabmap/rtabmap: subscribe_scan_cloud = false
[ INFO] [1680717220.840455144]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1680717220.840467848]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1680717220.840480602]: /rtabmap/rtabmap: approx_sync = false
[ INFO] [1680717220.840503625]: Setup depth callback
[ WARN] [1680717220.843662891]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717220.876645071]:
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ INFO] [1680717220.948194611]: rtabmap 0.20.23 started...
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1680717221.153764272]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1680717221.285350640]: rtabmapviz: Parameters read = 359
[ INFO] [1680717221.285374384]: rtabmapviz: Parameters successfully read.
[ INFO] [1680717221.567339808]: /rtabmap/rtabmapviz: subscribe_depth = true
[ INFO] [1680717221.567364614]: /rtabmap/rtabmapviz: subscribe_rgb = true
[ INFO] [1680717221.567375174]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1680717221.567386044]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1680717221.567396644]: /rtabmap/rtabmapviz: subscribe_odom_info = true
[ INFO] [1680717221.567409087]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1680717221.567418805]: /rtabmap/rtabmapviz: subscribe_scan = false
[ INFO] [1680717221.567429695]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false
[ INFO] [1680717221.567443231]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1680717221.567454021]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1680717221.567464200]: /rtabmap/rtabmapviz: approx_sync = false
[ INFO] [1680717221.567490759]: Setup depth callback
[ WARN] [1680717221.586636597]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details.
[ INFO] [1680717221.616280048]:
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ INFO] [1680717221.616382418]: rtabmapviz started.
[ WARN] [1680717228.613786654, 1680143339.556442282]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717228.613933747, 1680143339.556442282]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717228.613955578, 1680143339.556442282]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717233.613834677, 1680143344.556560696]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717233.613859423, 1680143344.556560696]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
[ WARN] [1680717233.614639424, 1680143344.556560696]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717238.620441742, 1680143349.563269350]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info
[ WARN] [1680717238.620979391, 1680143349.563269350]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom \
/zed2i/zed_node/left/image_rect_color/compressed \
/zed2i/zed_node/depth/depth_registered \
/zed2i/zed_node/depth/camera_info \
/rtabmap/odom_info
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
I want to use only compressed bags. What should I do? This is my bag file.
rosbag info my_bag_record4_2023-03-30-11-28-54.bag
path: my_bag_record4_2023-03-30-11-28-54.bag
version: 2.0
duration: 5:22s (322s)
start: Mar 30 2023 11:28:54.55 (1680143334.55)
end: Mar 30 2023 11:34:16.89 (1680143656.89)
size: 6.7 GB
messages: 126521
compression: none [5138/5138 chunks]
types: geometry_msgs/PoseStamped [d3812c3cbc69362b77dc0b19b345f8f5]
nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7]
sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/CompressedImage [8f7a12909da2c9d3332d540a0977563f]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /ouster/imu 32232 msgs : sensor_msgs/Imu
/ouster/points 3224 msgs : sensor_msgs/PointCloud2
/tf_static 2 msgs : tf2_msgs/TFMessage (2 connections)
/zed2i/zed_node/depth/camera_info 1914 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/depth/depth_registered 1914 msgs : sensor_msgs/Image
/zed2i/zed_node/depth/depth_registered/compressedDepth 1914 msgs : sensor_msgs/CompressedImage
/zed2i/zed_node/imu/data 64172 msgs : sensor_msgs/Imu
/zed2i/zed_node/left/camera_info 3828 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/left/image_rect_color/compressed 1914 msgs : sensor_msgs/CompressedImage
/zed2i/zed_node/odom 4834 msgs : nav_msgs/Odometry
/zed2i/zed_node/pose 4834 msgs : geometry_msgs/PoseStamped
/zed2i/zed_node/right/camera_info 3826 msgs : sensor_msgs/CameraInfo
/zed2i/zed_node/right/image_rect_color/compressed 1913 msgs : sensor_msgs/CompressedImage
-------------------------------------------------------------------------------------
topic hz
------------------------------------------------------------------------------------
Bag file information if you need more! Please tell me how to upload bag file.
thank you
| Free forum by Nabble | Edit this page |