Re: Can I use a bag taken using zed2i? (I used compression.)
Posted by beginner123 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Can-I-use-a-bag-taken-using-zed2i-I-used-compression-tp9395p9488.html
Thank you very much for your reply.
Both problems above have been resolved. thank you.
My skills are better than before, but I'm still a beginner.
I have a few more questions. I would be grateful if you could let me know!!
The closeLoop function could not be used when rtabmap was executed in binary. So, I built rtabmap from the source.
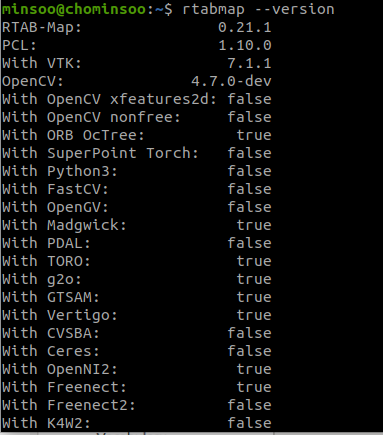
I succeeded in building g2o and gtsam together, and I tried to use it, but an error occurs when I run the command below...
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/rbg/image_rect_color depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data
... logging to /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/roslaunch-chominsoo-31546.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://chominsoo:39401/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rgbd_odometry/
* /rtabmap/rtabmap/
* /rtabmap/rtabmap_viz/
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.16.0
* /rtabmap/rgbd_odometry/approx_sync: False
* /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap_viz/approx_sync: False
* /rtabmap/rtabmap_viz/frame_id: camera_link
* /rtabmap/rtabmap_viz/odom_frame_id:
* /rtabmap/rtabmap_viz/queue_size: 10
* /rtabmap/rtabmap_viz/subscribe_depth: True
* /rtabmap/rtabmap_viz/subscribe_odom_info: True
* /rtabmap/rtabmap_viz/subscribe_rgb: True
* /rtabmap/rtabmap_viz/subscribe_rgbd: False
* /rtabmap/rtabmap_viz/subscribe_scan: False
* /rtabmap/rtabmap_viz/subscribe_scan_cloud: False
* /rtabmap/rtabmap_viz/subscribe_scan_descriptor: False
* /rtabmap/rtabmap_viz/subscribe_stereo: False
* /rtabmap/rtabmap_viz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_odom/rgbd_odometry)
rtabmap (rtabmap_slam/rtabmap)
rtabmap_viz (rtabmap_viz/rtabmap_viz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rgbd_odometry-1]: started with pid [31566]
process[rtabmap/rtabmap-2]: started with pid [31567]
process[rtabmap/rtabmap_viz-3]: started with pid [31568]
[ INFO] [1684165812.513523011]: Starting node...
[ INFO] [1684165812.537593649]: Initializing nodelet with 6 worker threads.
[ INFO] [1684165812.543174222]: Initializing nodelet with 6 worker threads.
[ INFO] [1684165812.578043501]: Starting node...
[ INFO] [1684165812.712573563]: rtabmap_viz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini"
[rtabmap/rgbd_odometry-1] process has died [pid 31566, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_odom/rgbd_odometry --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rgbd_odometry __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1.log].
log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1*.log
[rtabmap/rtabmap-2] process has died [pid 31567, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_slam/rtabmap --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections fiducial_transforms:=/fiducial_transforms odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rtabmap __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2.log].
log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2*.log
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1684165813.581277958]: rtabmap_viz: Reading parameters from the ROS server...
[ INFO] [1684165813.581900024]: rtabmap_viz: Cannot get rtabmap's parameters, waiting max 5 seconds in case the node has just been launched.
^C[rtabmap/rtabmap_viz-3] killing on exit
[rtabmap/rtabmap_viz-3] escalating to SIGTERM
shutting down processing monitor...
... shutting down processing monitor complete
done
URL: http://official-rtab-map-forum.206.s1.nabble.com/Can-I-use-a-bag-taken-using-zed2i-I-used-compression-tp9395p9488.html
Thank you very much for your reply.
Both problems above have been resolved. thank you.
My skills are better than before, but I'm still a beginner.
I have a few more questions. I would be grateful if you could let me know!!
The closeLoop function could not be used when rtabmap was executed in binary. So, I built rtabmap from the source.
I succeeded in building g2o and gtsam together, and I tried to use it, but an error occurs when I run the command below...
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/rbg/image_rect_color depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data
... logging to /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/roslaunch-chominsoo-31546.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://chominsoo:39401/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rgbd_odometry/
* /rtabmap/rtabmap/
* /rtabmap/rtabmap_viz/
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.16.0
* /rtabmap/rgbd_odometry/approx_sync: False
* /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap_viz/approx_sync: False
* /rtabmap/rtabmap_viz/frame_id: camera_link
* /rtabmap/rtabmap_viz/odom_frame_id:
* /rtabmap/rtabmap_viz/queue_size: 10
* /rtabmap/rtabmap_viz/subscribe_depth: True
* /rtabmap/rtabmap_viz/subscribe_odom_info: True
* /rtabmap/rtabmap_viz/subscribe_rgb: True
* /rtabmap/rtabmap_viz/subscribe_rgbd: False
* /rtabmap/rtabmap_viz/subscribe_scan: False
* /rtabmap/rtabmap_viz/subscribe_scan_cloud: False
* /rtabmap/rtabmap_viz/subscribe_scan_descriptor: False
* /rtabmap/rtabmap_viz/subscribe_stereo: False
* /rtabmap/rtabmap_viz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_odom/rgbd_odometry)
rtabmap (rtabmap_slam/rtabmap)
rtabmap_viz (rtabmap_viz/rtabmap_viz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rgbd_odometry-1]: started with pid [31566]
process[rtabmap/rtabmap-2]: started with pid [31567]
process[rtabmap/rtabmap_viz-3]: started with pid [31568]
[ INFO] [1684165812.513523011]: Starting node...
[ INFO] [1684165812.537593649]: Initializing nodelet with 6 worker threads.
[ INFO] [1684165812.543174222]: Initializing nodelet with 6 worker threads.
[ INFO] [1684165812.578043501]: Starting node...
[ INFO] [1684165812.712573563]: rtabmap_viz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini"
[rtabmap/rgbd_odometry-1] process has died [pid 31566, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_odom/rgbd_odometry --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rgbd_odometry __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1.log].
log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1*.log
[rtabmap/rtabmap-2] process has died [pid 31567, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_slam/rtabmap --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections fiducial_transforms:=/fiducial_transforms odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rtabmap __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2.log].
log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2*.log
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1684165813.581277958]: rtabmap_viz: Reading parameters from the ROS server...
[ INFO] [1684165813.581900024]: rtabmap_viz: Cannot get rtabmap's parameters, waiting max 5 seconds in case the node has just been launched.
^C[rtabmap/rtabmap_viz-3] killing on exit
[rtabmap/rtabmap_viz-3] escalating to SIGTERM
shutting down processing monitor...
... shutting down processing monitor complete
done
| Free forum by Nabble | Edit this page |