Re: Demo RTAB-Map on Turtlebot
Posted by Marina on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p951.html
Hello Mr. Mathieu
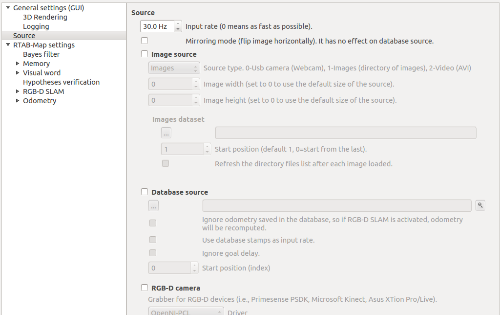
I'm trying to use the Dataset fr2 / large_no_loop by following the steps outlined above could make use of associate.py scritp with the directory of the dataset, and created a file with similar .yaml data which shows the previous post and put them in Documents folder / RTAB-MAP / put here do not have this third folder that had to make the call camera_info. So far so good my difficulty was at the time of RTAB-MAP preparation to enter the Preferences / source not found the options described, for example, the source type found in source image but have nowhere to put the name of calibration as required, or where to upload the rgb_sync and depth_sync (that when using the script did not find these directories as well). In short I could not identify the options for achieving the steps 3,4, and 5 in the previous post.
Using Imagen source menu and uploading just the past rgb within the dataset and give the play the RTAB-map displays the error below:

I thank the attention !!
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p951.html
Hello Mr. Mathieu
I'm trying to use the Dataset fr2 / large_no_loop by following the steps outlined above could make use of associate.py scritp with the directory of the dataset, and created a file with similar .yaml data which shows the previous post and put them in Documents folder / RTAB-MAP / put here do not have this third folder that had to make the call camera_info. So far so good my difficulty was at the time of RTAB-MAP preparation to enter the Preferences / source not found the options described, for example, the source type found in source image but have nowhere to put the name of calibration as required, or where to upload the rgb_sync and depth_sync (that when using the script did not find these directories as well). In short I could not identify the options for achieving the steps 3,4, and 5 in the previous post.
Using Imagen source menu and uploading just the past rgb within the dataset and give the play the RTAB-map displays the error below:
I thank the attention !!
| Free forum by Nabble | Edit this page |