Re: Demo RTAB-Map on Turtlebot
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p957.html
Hi Marina,
these datasets are challenging because the depth values are over 3-4 meters very often (Kinect-like sensors have poor depth resolution after 4 meters), so we cannot get a very precise odometry. For the red screens, they happen when there are no enough features to track with good depth values. For example, in the large_no_loop dataset at time 1311875875.131870, we have:

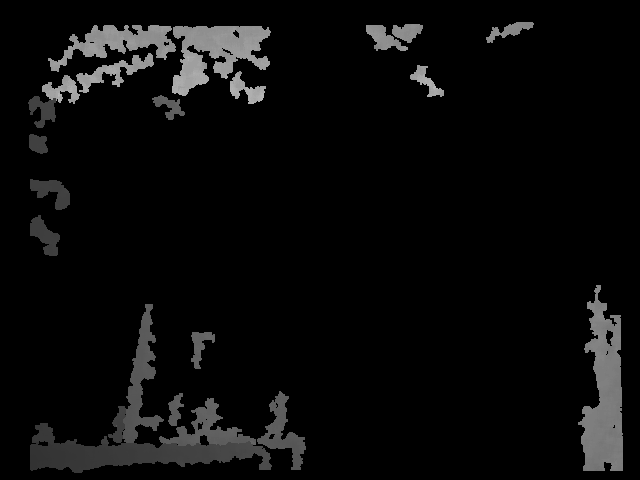
There are almost no valid depth values.
You can try to reduce the framerate (to process more images), try Optical Flow odometry or use datasets similar to "rgbd_dataset_freiburg3_long_office_household". When scanning with such sensors (Kinect v1 or Xtion Live Pro), you should avoid situations where objects are over 4 meters or there are no objects at all (empty spaces). More info about RED screens here:https://github.com/introlab/rtabmap/wiki/Kinect-mapping#lostodometry
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p957.html
Hi Marina,
these datasets are challenging because the depth values are over 3-4 meters very often (Kinect-like sensors have poor depth resolution after 4 meters), so we cannot get a very precise odometry. For the red screens, they happen when there are no enough features to track with good depth values. For example, in the large_no_loop dataset at time 1311875875.131870, we have:
There are almost no valid depth values.
You can try to reduce the framerate (to process more images), try Optical Flow odometry or use datasets similar to "rgbd_dataset_freiburg3_long_office_household". When scanning with such sensors (Kinect v1 or Xtion Live Pro), you should avoid situations where objects are over 4 meters or there are no objects at all (empty spaces). More info about RED screens here:https://github.com/introlab/rtabmap/wiki/Kinect-mapping#lostodometry
cheers,
Mathieu
| Free forum by Nabble | Edit this page |