Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by aninath93 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9650.html
Hi Mathieu,
Opened Issue
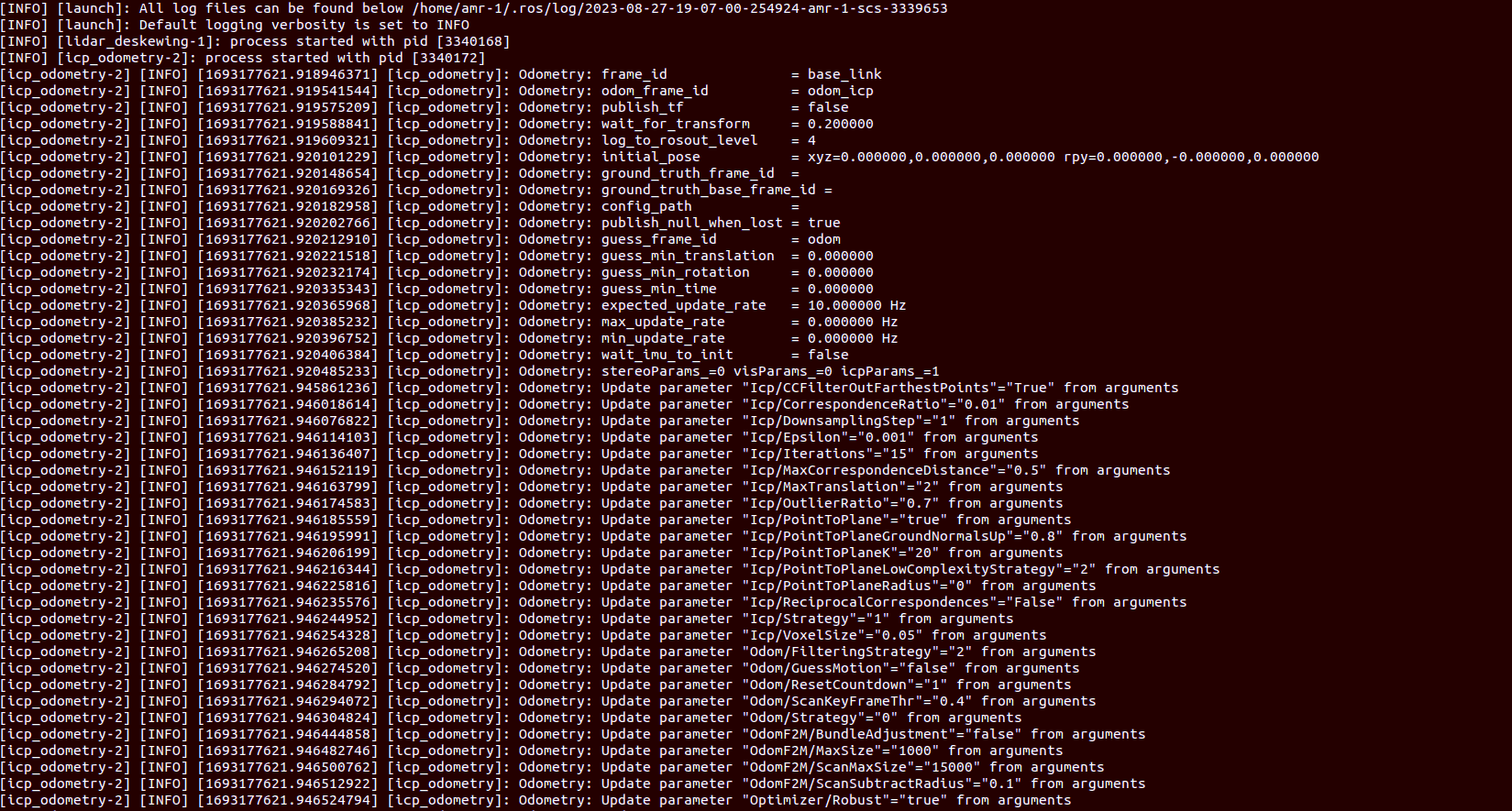
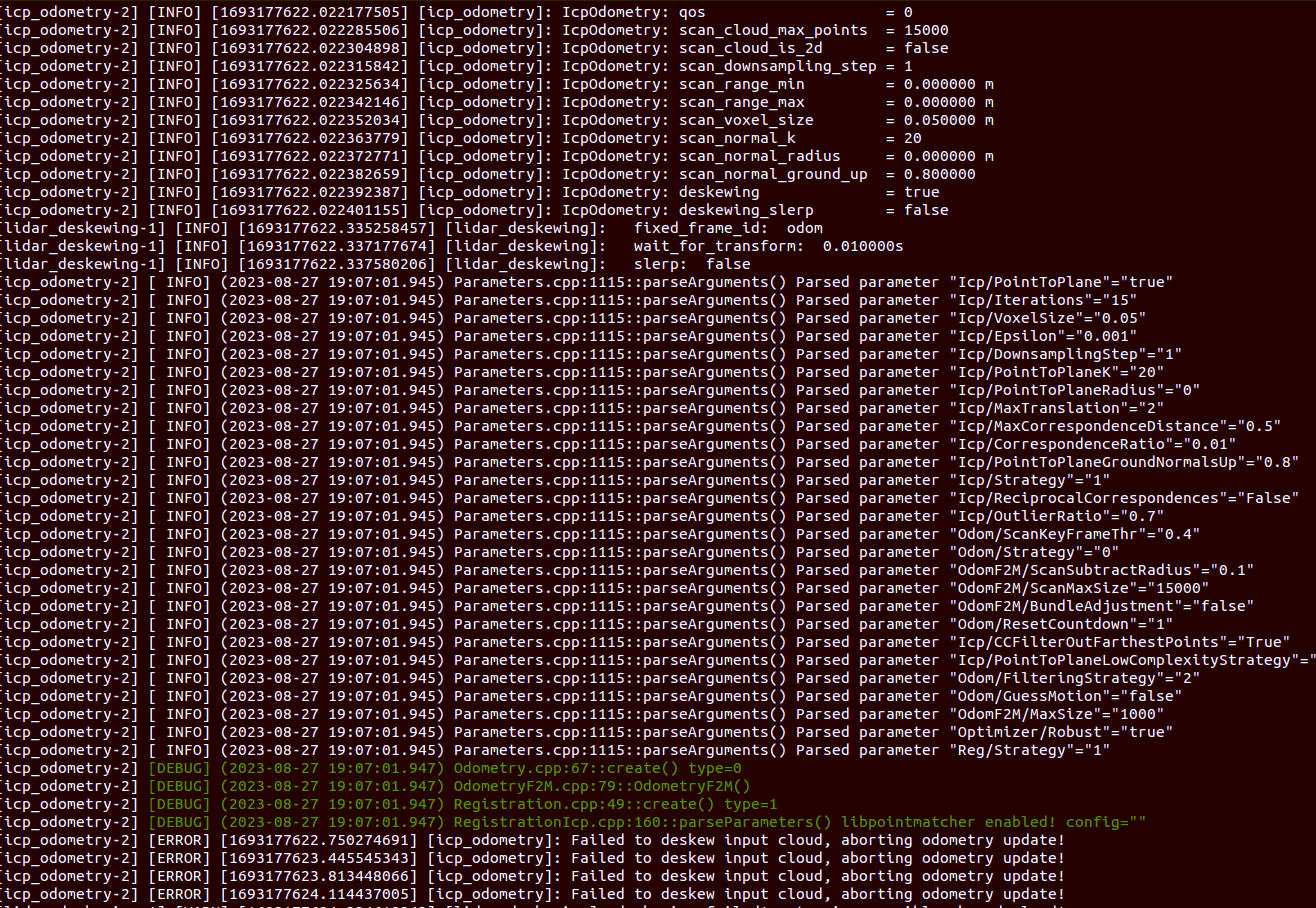
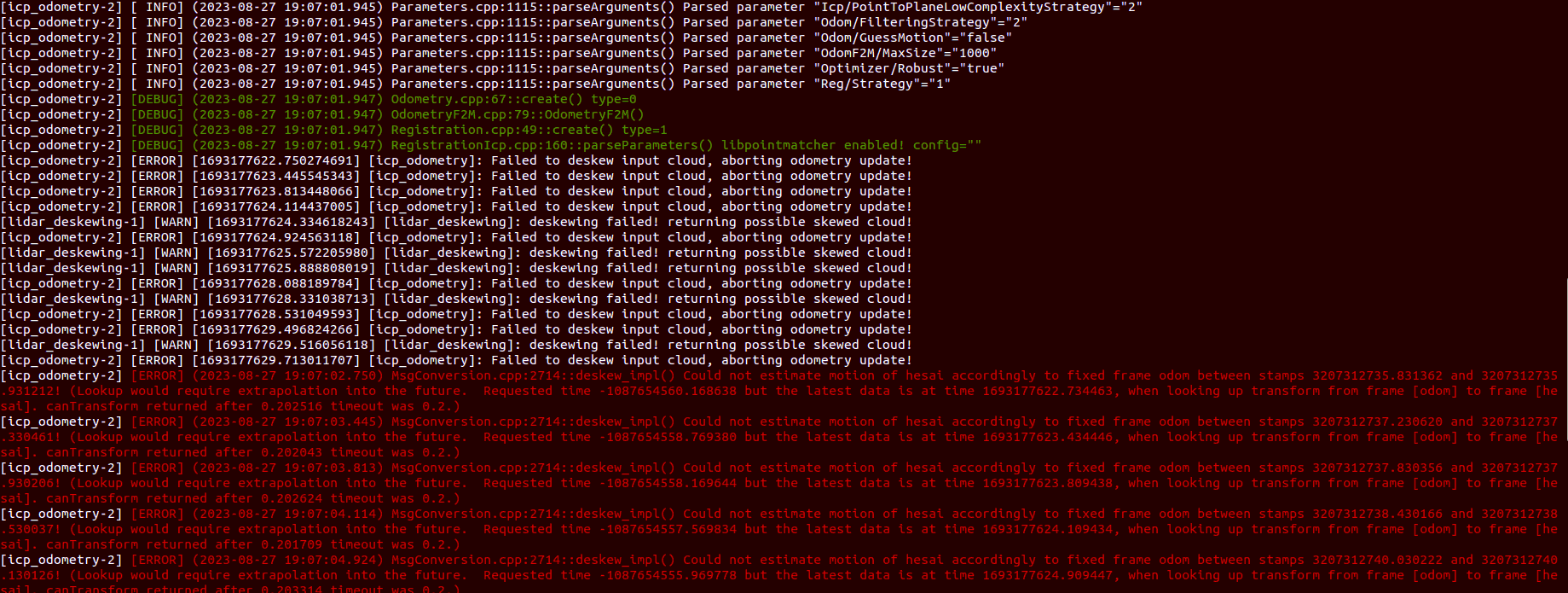
I have a issue opened at GITHUB and just wanted your feedback on this, as I am just trying to figure out lidar_deskewing with LIDAR on ROS2 side trying to follow your example from ROS1. If I compute ICP odometry as you had mentioned, it works. As soon as I plug EKF frame into guess_frame_id and odom_frame for lidar_deskewing. It gives me below error.
ekf_filter_node:
ros__parameters:
frequency: 40.0
two_d_mode: true
publish_tf: true
use_control: false
print_diagnostics: false
debug: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
sensor_timeout: 0.15
#x , y , z,
#roll , pitch , yaw,
#vx , vy , vz,
#vroll , vpitch, vyaw,
#ax , ay , az
odom0: /diffbot/odom
odom0_differential: false
odom0_relative: false
odom0_queue_size: 2
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
imu0: /zed2i/zed_node/imu/data
imu0_remove_gravitational_acceleration: true
imu0_queue_size: 2
imu0_relative: false
imu0_config: [false, false, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]
Node(
package='rtabmap_util', executable='lidar_deskewing', output='screen',
parameters=[{
'fixed_frame_id':'odom',
'slerp':False,
'wait_for_transform':0.01,
}],
remappings=[
('input_cloud', '/lidar_points3') #subs
#('/lidar_points3/deskewed','/lidar_points3/deskewed') #publish
]),
Node(
package='rtabmap_odom', executable='icp_odometry', output='screen',
parameters=[{
'ground_truth_base_frame_id':'',
'frame_id':'base_link',
'odom_frame_id':'odom_icp',
'guess_frame_id':'odom',
'publish_tf':False,
'approx_sync':False,
'tf_prefix':'',
'wait_for_transform':0.2,
'queue_size':5,
'publish_null_when_lost':True,
'expected_update_rate':10.0,
'deskewing':deskewing,
'use_sim_time':use_sim_time,
'deskewing_slerp':False,
'scan_cloud_max_points':15000,
'wait_imu_to_init':False,
}],
remappings=[
('scan_cloud', '/lidar_points3'), #subs
('odom','/odom/icp'), #publis
#('imu','/zed2i/zed_node/imu/data/filtered')
],
arguments=[
'--udebug',
#ICP
'Icp/PointToPlane', 'true',
'Icp/Iterations', '15',
'Icp/VoxelSize', '0.05', #0 means all scans used, check computation power to levrage this
'Icp/Epsilon', '0.001',
'Icp/DownsamplingStep','1',
'Icp/PointToPlaneK', '20',
'Icp/PointToPlaneRadius', '0',
'Icp/MaxTranslation', '2', #to reject ICP jumps
'Icp/MaxCorrespondenceDistance', '0.5', #voxel size res*10
'Icp/CorrespondenceRatio', '0.01',
'Icp/PointToPlaneGroundNormalsUp','0.8',
'Icp/Strategy', '1',
'Icp/ReciprocalCorrespondences','False',
'Icp/OutlierRatio', '0.7',
#Odom
'Odom/ScanKeyFrameThr', '0.4',
'Odom/Strategy', '0', #(F2F) (1=F2F)
'OdomF2M/ScanSubtractRadius', '0.1', #resolution
'OdomF2M/ScanMaxSize', '15000',
'OdomF2M/BundleAdjustment', 'false',
'Odom/ResetCountdown','1',
'Icp/CCFilterOutFarthestPoints','True',
'Icp/PointToPlaneLowComplexityStrategy','2',
'Odom/FilteringStrategy','2',
'Odom/GuessMotion','false',
'OdomF2M/MaxSize','1000',
'Optimizer/Robust','true',
'Reg/Strategy','1',
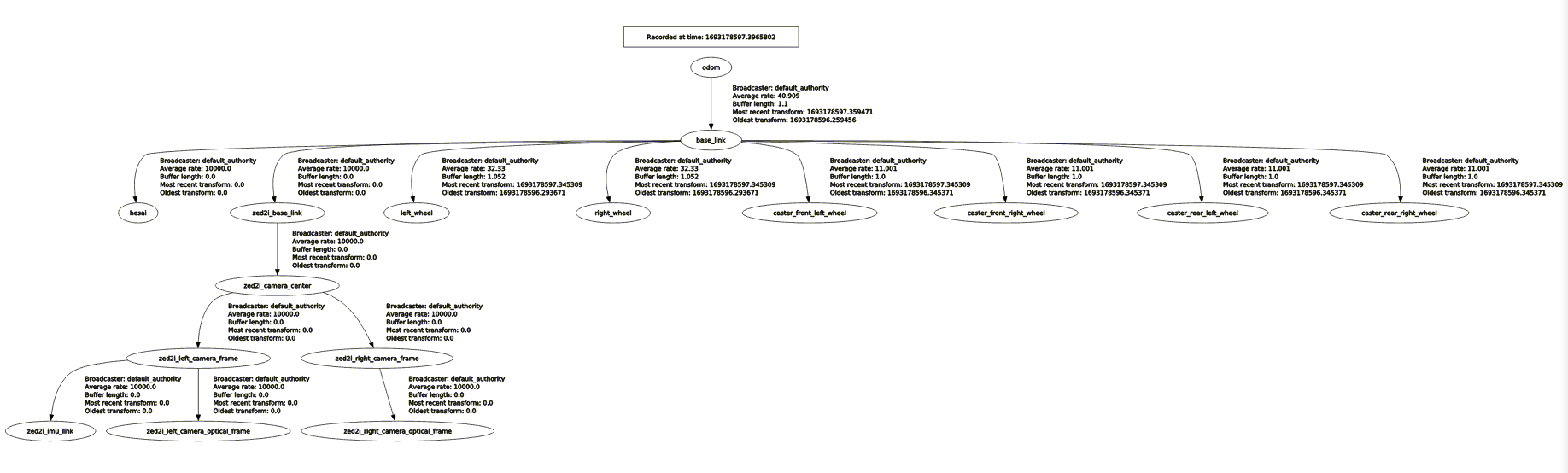
I tried doing echo between frames, just to make sure my lidar frame is connected to odom and base_link and it is. Any thoughts on this please ?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9650.html
Hi Mathieu,
Opened Issue
I have a issue opened at GITHUB and just wanted your feedback on this, as I am just trying to figure out lidar_deskewing with LIDAR on ROS2 side trying to follow your example from ROS1. If I compute ICP odometry as you had mentioned, it works. As soon as I plug EKF frame into guess_frame_id and odom_frame for lidar_deskewing. It gives me below error.
ekf_filter_node:
ros__parameters:
frequency: 40.0
two_d_mode: true
publish_tf: true
use_control: false
print_diagnostics: false
debug: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
sensor_timeout: 0.15
#x , y , z,
#roll , pitch , yaw,
#vx , vy , vz,
#vroll , vpitch, vyaw,
#ax , ay , az
odom0: /diffbot/odom
odom0_differential: false
odom0_relative: false
odom0_queue_size: 2
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
imu0: /zed2i/zed_node/imu/data
imu0_remove_gravitational_acceleration: true
imu0_queue_size: 2
imu0_relative: false
imu0_config: [false, false, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]
Node(
package='rtabmap_util', executable='lidar_deskewing', output='screen',
parameters=[{
'fixed_frame_id':'odom',
'slerp':False,
'wait_for_transform':0.01,
}],
remappings=[
('input_cloud', '/lidar_points3') #subs
#('/lidar_points3/deskewed','/lidar_points3/deskewed') #publish
]),
Node(
package='rtabmap_odom', executable='icp_odometry', output='screen',
parameters=[{
'ground_truth_base_frame_id':'',
'frame_id':'base_link',
'odom_frame_id':'odom_icp',
'guess_frame_id':'odom',
'publish_tf':False,
'approx_sync':False,
'tf_prefix':'',
'wait_for_transform':0.2,
'queue_size':5,
'publish_null_when_lost':True,
'expected_update_rate':10.0,
'deskewing':deskewing,
'use_sim_time':use_sim_time,
'deskewing_slerp':False,
'scan_cloud_max_points':15000,
'wait_imu_to_init':False,
}],
remappings=[
('scan_cloud', '/lidar_points3'), #subs
('odom','/odom/icp'), #publis
#('imu','/zed2i/zed_node/imu/data/filtered')
],
arguments=[
'--udebug',
#ICP
'Icp/PointToPlane', 'true',
'Icp/Iterations', '15',
'Icp/VoxelSize', '0.05', #0 means all scans used, check computation power to levrage this
'Icp/Epsilon', '0.001',
'Icp/DownsamplingStep','1',
'Icp/PointToPlaneK', '20',
'Icp/PointToPlaneRadius', '0',
'Icp/MaxTranslation', '2', #to reject ICP jumps
'Icp/MaxCorrespondenceDistance', '0.5', #voxel size res*10
'Icp/CorrespondenceRatio', '0.01',
'Icp/PointToPlaneGroundNormalsUp','0.8',
'Icp/Strategy', '1',
'Icp/ReciprocalCorrespondences','False',
'Icp/OutlierRatio', '0.7',
#Odom
'Odom/ScanKeyFrameThr', '0.4',
'Odom/Strategy', '0', #(F2F) (1=F2F)
'OdomF2M/ScanSubtractRadius', '0.1', #resolution
'OdomF2M/ScanMaxSize', '15000',
'OdomF2M/BundleAdjustment', 'false',
'Odom/ResetCountdown','1',
'Icp/CCFilterOutFarthestPoints','True',
'Icp/PointToPlaneLowComplexityStrategy','2',
'Odom/FilteringStrategy','2',
'Odom/GuessMotion','false',
'OdomF2M/MaxSize','1000',
'Optimizer/Robust','true',
'Reg/Strategy','1',
I tried doing echo between frames, just to make sure my lidar frame is connected to odom and base_link and it is. Any thoughts on this please ?
| Free forum by Nabble | Edit this page |