Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by aninath93 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9652.html
Hi Mathieu,
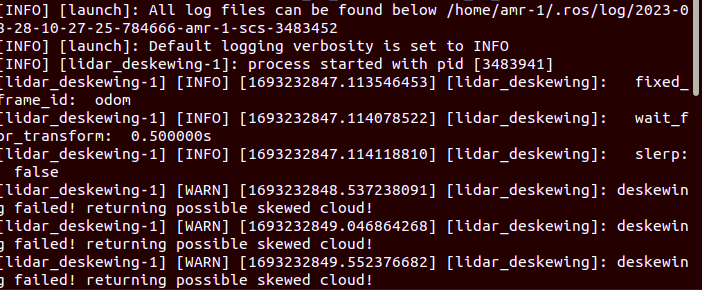
By making the controller as PTP master, syncing the LIDAR with it, time of ROS and LIDAR matches and I can display of Pointcloud2 wrt odom frame, but still when I just launch lidar_deskewing node and no icp_odom I still see warning , deskewing failed, possible skewed cloud with published topic input_cloud/deskewed.
 MsgConversion.cpp
MsgConversion.cpp
Also just to add, I had added datatype 8 for timestamp in this file to support my lidar and changed the references to double, I don't know if anywhere else this needs to be changed, but I did build the project.

It looks to me as if it is issue with tf2 buffer size.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9652.html
Hi Mathieu,
By making the controller as PTP master, syncing the LIDAR with it, time of ROS and LIDAR matches and I can display of Pointcloud2 wrt odom frame, but still when I just launch lidar_deskewing node and no icp_odom I still see warning , deskewing failed, possible skewed cloud with published topic input_cloud/deskewed.
MsgConversion.cppAlso just to add, I had added datatype 8 for timestamp in this file to support my lidar and changed the references to double, I don't know if anywhere else this needs to be changed, but I did build the project.
It looks to me as if it is issue with tf2 buffer size.
| Free forum by Nabble | Edit this page |