Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by aninath93 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9698.html
Hi Mathieu,
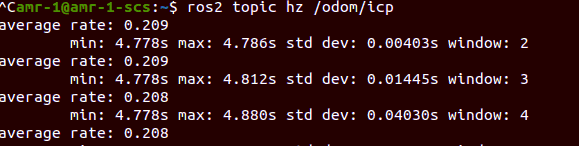
Thank you for the explanation, I appreciate you. I have made changes to the file link below and looks like ICP odometry is working fine, just when deskewing is set to True, I get "deskewing failed, aborting odometry" at 10Hz Lidar, but when Lidar is at 20Hz, it works but the rate is 0.2Hz of the resulting /odom/icp node which is very slow and my guess towards the addition of "for" loop computation where the width of Hesai cloud is too large, can you please take a look at it.
I tried opening a PR request but could not as I am not a collaborator.
https://github.com/introlab/rtabmap_ros/issues/1035
https://easyupload.io/m/awgm2t
I am trying to achieve dolly docking application in lab (pick from location and place to different location), Nav2 still has a long standing ticket for the same so other alternate I was thinking was to use reflectors behind cart and use intensity of LIDAR to drive under using Nav2 plugin but have not come to conclusion yet on this part as Nav2 will still detect object as obstacle (still need reading how to avoid obstacle avoidance at that pose). Environment is complex, have enough details like lab equipment.
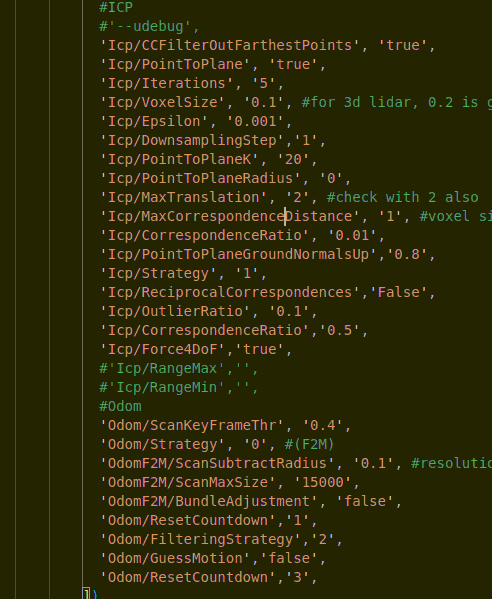
I did try to go through most of the parameters and found this based on relevance, can you please suggest any improvements or changes to this ? Also RangeMax and Min are for robot hitting laser scans in units of meters ? Or what is the purpose of that ? Also is F2F better for match ?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9698.html
Hi Mathieu,
Thank you for the explanation, I appreciate you. I have made changes to the file link below and looks like ICP odometry is working fine, just when deskewing is set to True, I get "deskewing failed, aborting odometry" at 10Hz Lidar, but when Lidar is at 20Hz, it works but the rate is 0.2Hz of the resulting /odom/icp node which is very slow and my guess towards the addition of "for" loop computation where the width of Hesai cloud is too large, can you please take a look at it.
I tried opening a PR request but could not as I am not a collaborator.
https://github.com/introlab/rtabmap_ros/issues/1035
https://easyupload.io/m/awgm2t
I am trying to achieve dolly docking application in lab (pick from location and place to different location), Nav2 still has a long standing ticket for the same so other alternate I was thinking was to use reflectors behind cart and use intensity of LIDAR to drive under using Nav2 plugin but have not come to conclusion yet on this part as Nav2 will still detect object as obstacle (still need reading how to avoid obstacle avoidance at that pose). Environment is complex, have enough details like lab equipment.
I did try to go through most of the parameters and found this based on relevance, can you please suggest any improvements or changes to this ? Also RangeMax and Min are for robot hitting laser scans in units of meters ? Or what is the purpose of that ? Also is F2F better for match ?
| Free forum by Nabble | Edit this page |