Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by aninath93 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9700.html
Hi Mathieu,
I tried the ICP_odom node with deskewing, cannot get more than 05Hz (incoming robot_localization running at 100hz and ros2_control at 150hz) where as on the odom generated by this node but with deskewing false I can get 15hz at LIDAR = 20Hz (Is deskewing required if Lidar is running at 20 Hz? and what is the minimum Hz the deskewing is required for LIDAR, is it when LIDAR is slower than Robot travel speed)
After adding camera to SLAM node and feeding odom, Rtabmap complains about no data at 5sec, and get error message for node crashing, ICP odometry still computes. This is my launch file, can you please suggest:
https://pastebin.com/AD9CQf08
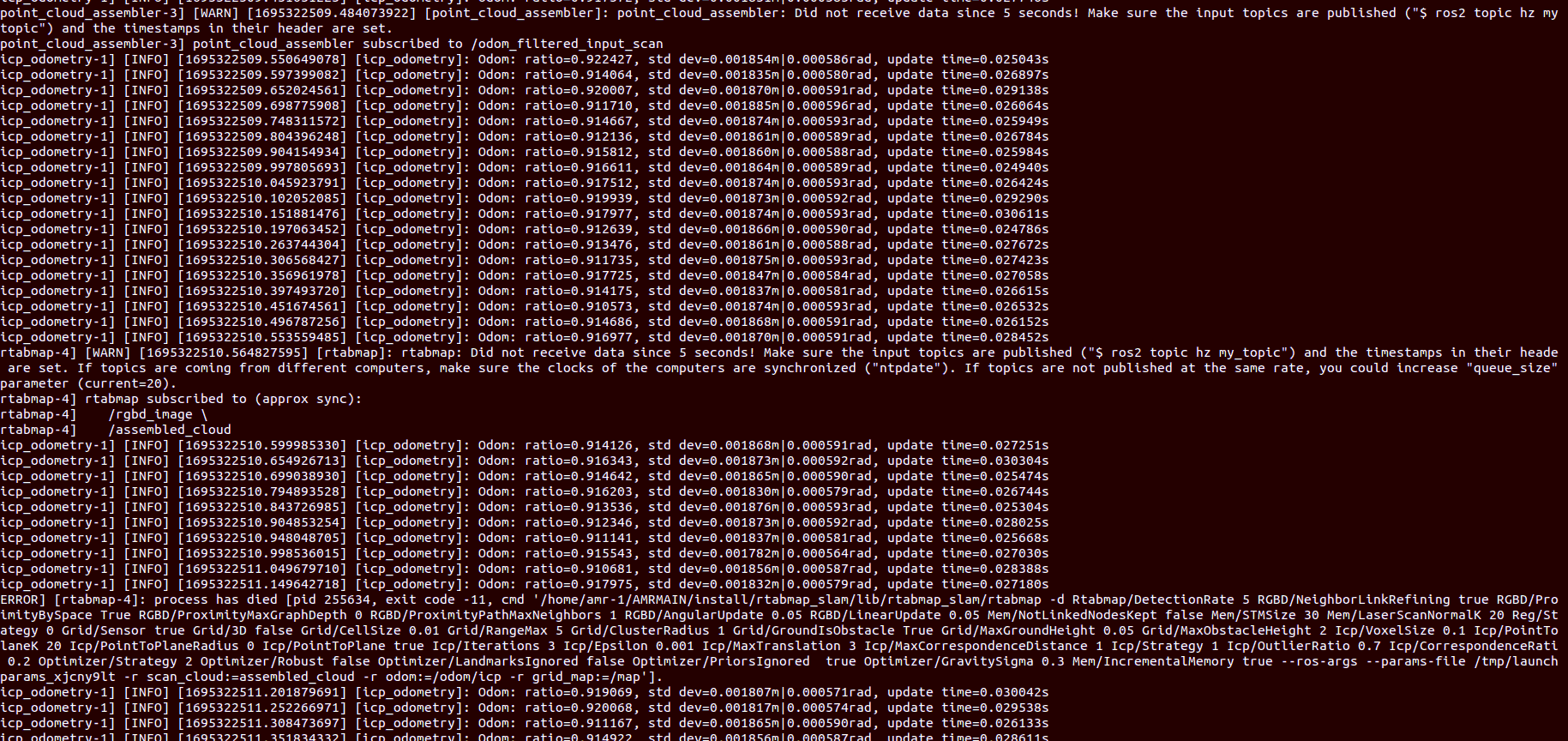
But when I turn that subscribe rgb to false, it works fine.
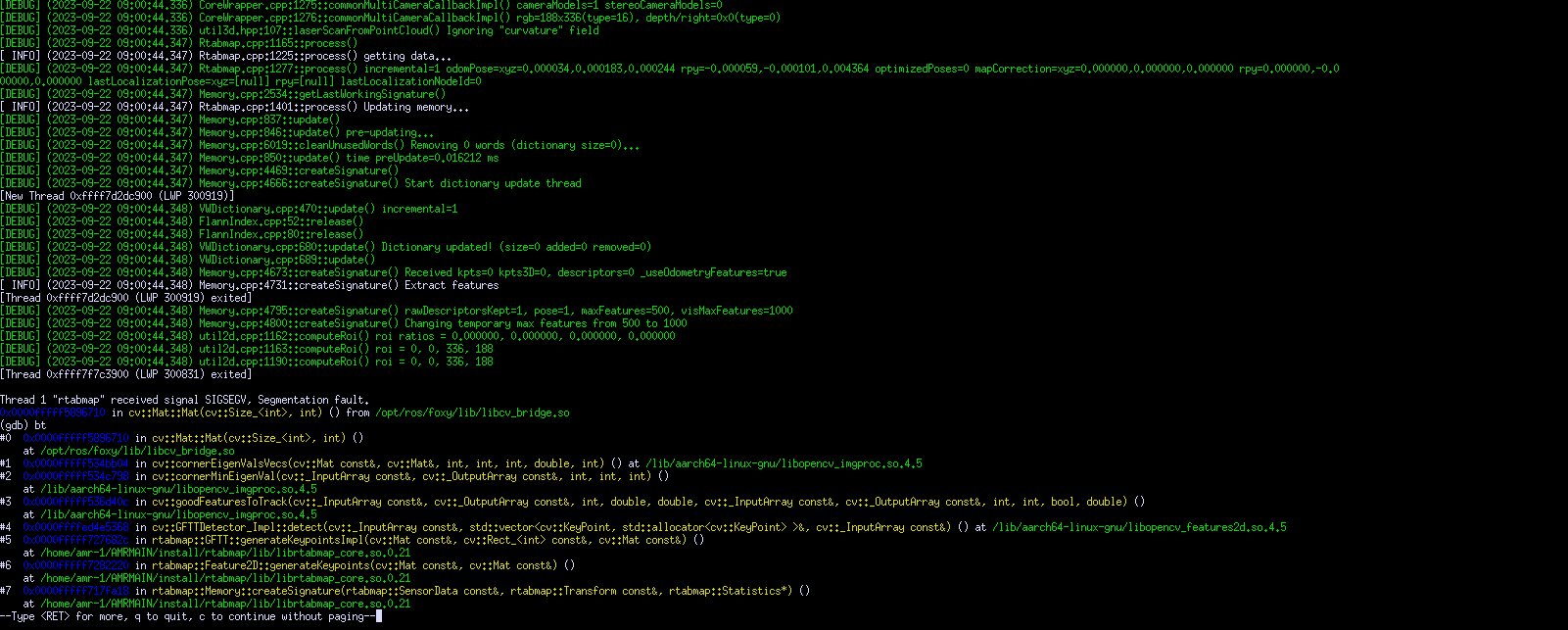
Using gdb debugging, is it because of opencv version ? I am on Jetpack 5.1
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9700.html
Hi Mathieu,
I tried the ICP_odom node with deskewing, cannot get more than 05Hz (incoming robot_localization running at 100hz and ros2_control at 150hz) where as on the odom generated by this node but with deskewing false I can get 15hz at LIDAR = 20Hz (Is deskewing required if Lidar is running at 20 Hz? and what is the minimum Hz the deskewing is required for LIDAR, is it when LIDAR is slower than Robot travel speed)
After adding camera to SLAM node and feeding odom, Rtabmap complains about no data at 5sec, and get error message for node crashing, ICP odometry still computes. This is my launch file, can you please suggest:
https://pastebin.com/AD9CQf08
But when I turn that subscribe rgb to false, it works fine.
Using gdb debugging, is it because of opencv version ? I am on Jetpack 5.1
| Free forum by Nabble | Edit this page |