Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by aninath93 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9708.html
Hi Mathieu,
Firstly thank you, it worked as you mentioned (with slerp I got ~7hz but without slerp I still get max ~3Hz with lidar at 8 hz) . Just had to re-image the controller and build opencv bridge as you stated. Yes, I am using Jetson AGX Orin controller.
I will appreciate if you can please glance my launch file for any further parameter optimizations which I would have missed from the parameter list. I do not have any bag or issue, just hypothetical case consideration. Also in localization mode, can most of the arguments be ported over from mapping ones which I have currently in setup for setting localization/mapping modes ?
https://pastebin.com/guFNx3tV
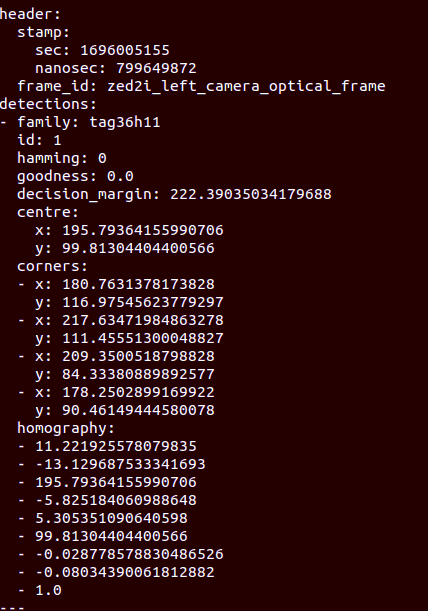
While using external Apriltag_ros library externally, does Marker detection parameters play any role ?
Also how does these tags be saved as labels in RTAB-Map map, Meaning while sending pose to go to, can it be referred to that landmark location for sending goal pose like area1, area2 etc ?
Also Can I use Kp/DetectorStrategy = 10 and Vis/FeatureType=10 for loop closures with my current setup as I am using stereo mode for better accuracy on loop closure ?
question: Why would we need octomap vs occupancy grid for navigation stack (Nav2) (is it better to use octomap in 2D planar environment for moving people so it can clear objects in localization phase, meaning mapping with static environment ) ?
For saving map, is it just terminating the rtabmap and its saved to database and then when in localization mode, remapping map topic should get populated from database and project map ?
Can you please share your views on this constantly moving environment.
Ultimately I want to integrate with full Nav2 stack and Rtab-map.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p9708.html
Hi Mathieu,
Firstly thank you, it worked as you mentioned (with slerp I got ~7hz but without slerp I still get max ~3Hz with lidar at 8 hz) . Just had to re-image the controller and build opencv bridge as you stated. Yes, I am using Jetson AGX Orin controller.
I will appreciate if you can please glance my launch file for any further parameter optimizations which I would have missed from the parameter list. I do not have any bag or issue, just hypothetical case consideration. Also in localization mode, can most of the arguments be ported over from mapping ones which I have currently in setup for setting localization/mapping modes ?
https://pastebin.com/guFNx3tV
While using external Apriltag_ros library externally, does Marker detection parameters play any role ?
Also how does these tags be saved as labels in RTAB-Map map, Meaning while sending pose to go to, can it be referred to that landmark location for sending goal pose like area1, area2 etc ?
Also Can I use Kp/DetectorStrategy = 10 and Vis/FeatureType=10 for loop closures with my current setup as I am using stereo mode for better accuracy on loop closure ?
question: Why would we need octomap vs occupancy grid for navigation stack (Nav2) (is it better to use octomap in 2D planar environment for moving people so it can clear objects in localization phase, meaning mapping with static environment ) ?
For saving map, is it just terminating the rtabmap and its saved to database and then when in localization mode, remapping map topic should get populated from database and project map ?
Can you please share your views on this constantly moving environment.
Ultimately I want to integrate with full Nav2 stack and Rtab-map.
| Free forum by Nabble | Edit this page |