Stereo B Mapping Problem
Posted by minato_99 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Stereo-B-Mapping-Problem-tp9801.html
Hi,
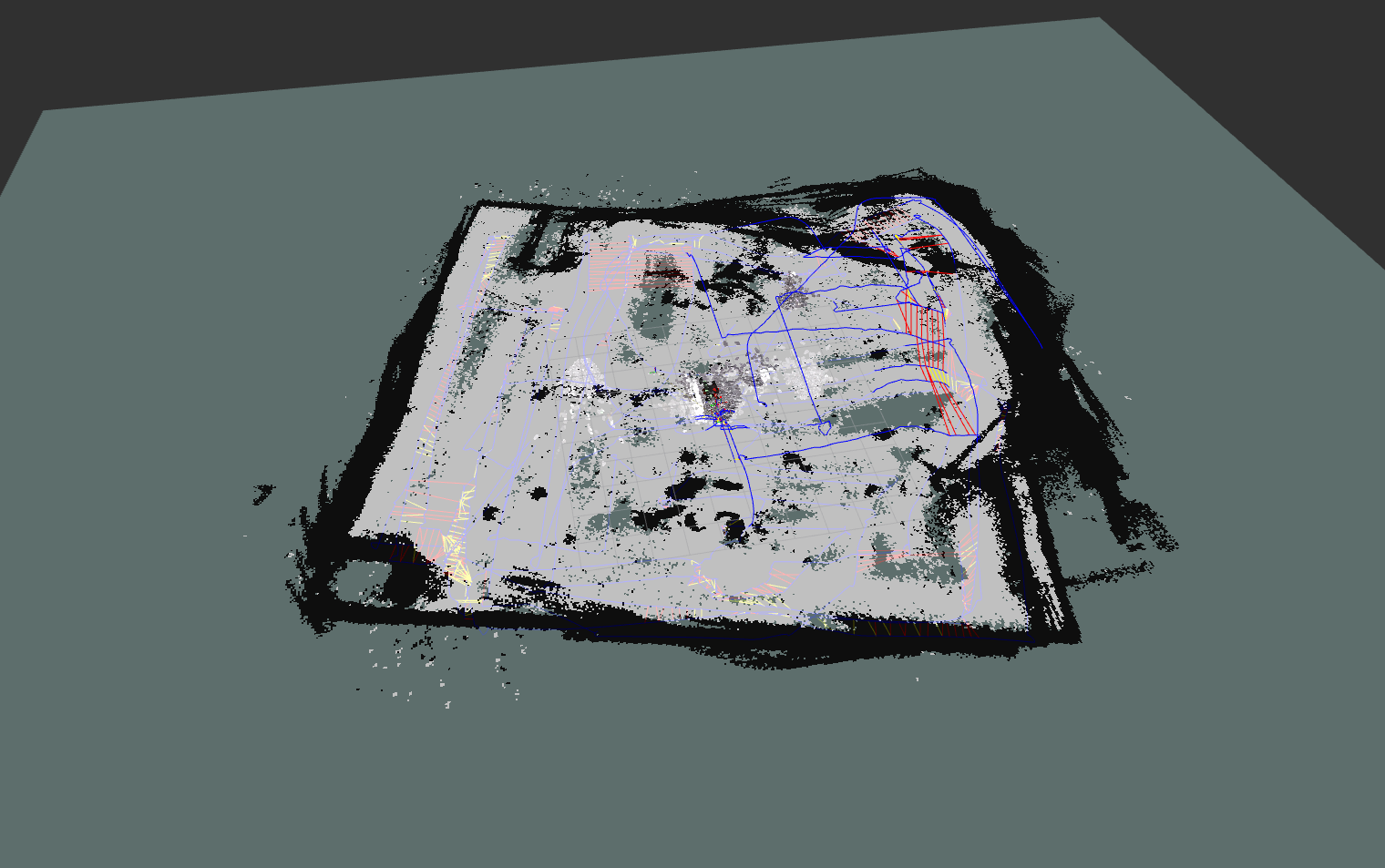
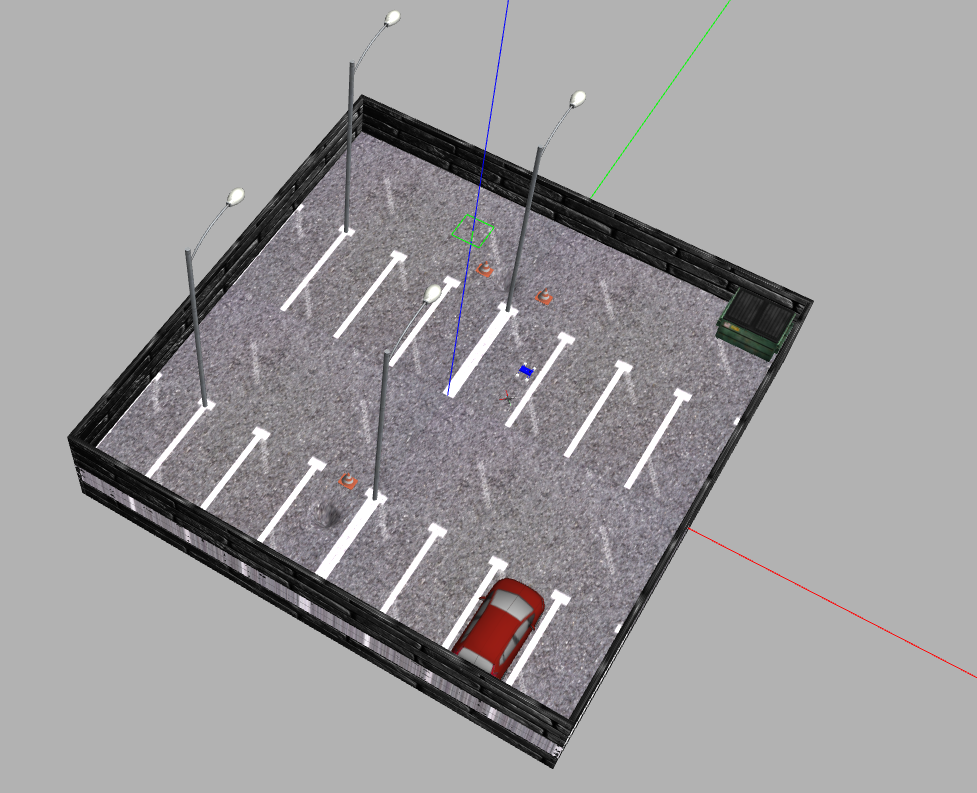
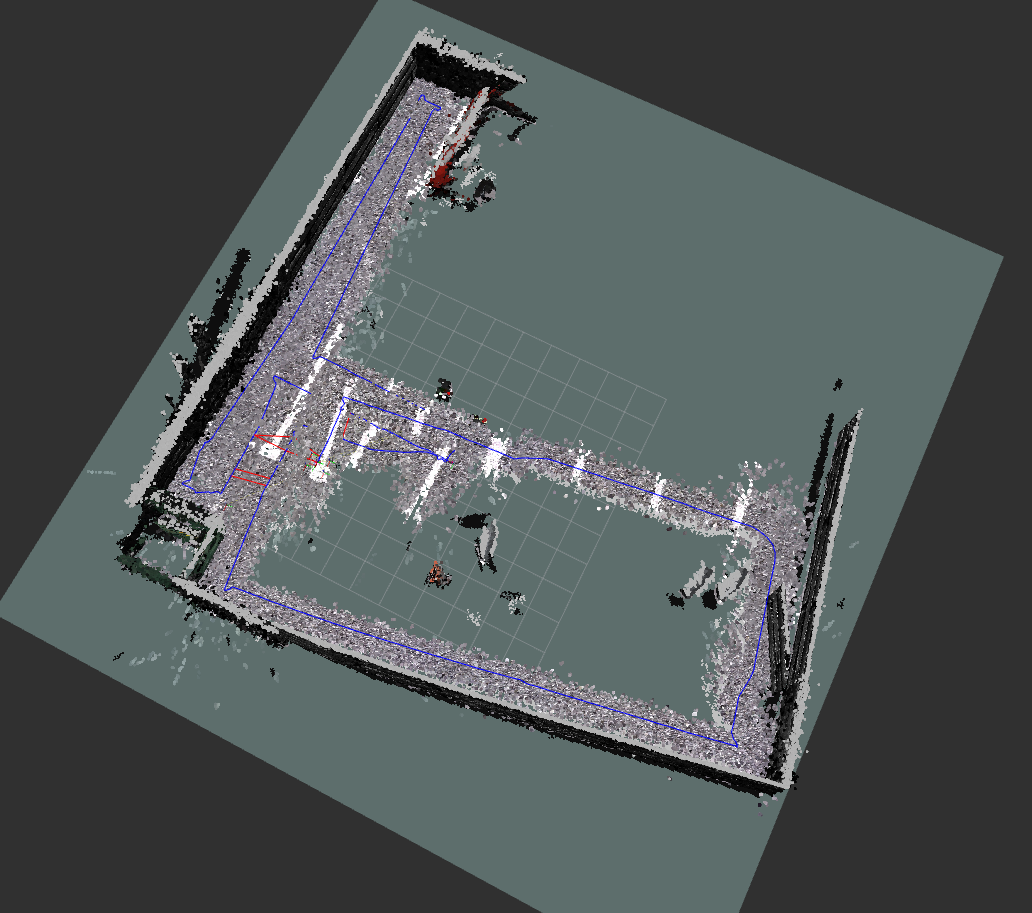
I am using a stereo camera to create a map of the gazebo worlds. I have attached image file of gazebo world and the map I created. The map has many corners and contours.
The launch file I have used is below.
What are the parameters should I choose since I always get wrong loop closure detection error. After spending more time in creating a map in a single run. The update time becomes very large the my computer barely run and states the error of odom transformation lost.
What are the parameters should I tweak to get rid of this error ? Thanks.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Stereo-B-Mapping-Problem-tp9801.html
Hi,
I am using a stereo camera to create a map of the gazebo worlds. I have attached image file of gazebo world and the map I created. The map has many corners and contours.
The launch file I have used is below.
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<!-- Choose visualization -->
<arg name="rtabmapviz" default="false" />
<arg name="rviz" default="true" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2) " /> <!-- roll and yaw = -$(arg pi/2) -->
<node pkg="tf" type="static_transform_publisher" name="camera_base_link"
args="$(arg optical_rotate) chassis camera 50" />
<!-- Run the ROS package stereo_image_proc -->
<group ns="/stereo" >
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc"/>
<!-- Odometry -->
<node pkg="rtabmap_odom" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="left/image_rect_color"/>
<remap from="right/image_rect" to="right/image_rect"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
<param name="frame_id" type="string" value="chassis"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="approx_sync" type="bool" value="true"/>
<param name="queue_size" type="int" value="5"/>
<param name="Odom/MinInliers" type="string" value="12"/>
<param name="Odom/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
</node>
</group>
<!-- Mapping -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen" args="delete_db_on_start"> <!-- delete_db_on_start-->
<param name="frame_id" type="string" value="chassis"/>
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="true"/>
<remap from="left/image_rect" to="/stereo/left/image_raw"/>
<remap from="right/image_rect" to="/stereo/right/image_raw"/>
<remap from="left/camera_info" to="/stereo/left/camera_info"/>
<remap from="right/camera_info" to="/stereo/right/camera_info"/>
<remap from="odom" to="/stereo/odom"/>
<param name="queue_size" type="int" value="30"/>
<!-- RTAB-Map's parameters -->
<param name="Vis/MinInliers" type="string" value="12"/>
<!-- <param name="Mem/IncrementalMemory" type="bool" value="true" /> -->
<!-- RTAB-Map's parameters: do "rosrun rtabmap rtabmap (double-dash)params" to see the list of available parameters. -->
<param name="RGBD/ProximityBySpace" type="string" value="true"/> <!-- Local loop closure detection (using estimated position) with locations in WM -->
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/> <!--false -> <!- Set to false to generate map correction between /map and /odom -->
<param name="Kp/MaxDepth" type="string" value="4.0"/>
<param name="Reg/Strategy" type="string" value="0"/> <!-- 0 --> <!-- Loop closure transformation: 0=Visual, 1=ICP, 2=Visual+ICP -->
<param name="Icp/CorrespondenceRatio" type="string" value="0.1"/>
<param name="Vis/InlierDistance" type="string" value="0.1"/> <!-- 3D visual words correspondence distance -->
<param name="RGBD/AngularUpdate" type="string" value="0.1"/> <!-- Update map only if the robot is moving -->
<param name="RGBD/LinearUpdate" type="string" value="0.1"/> <!-- Update map only if the robot is moving -->
<param name="Rtabmap/DetectionRate" type="string" value="1000"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="1"/> <!-- 1-->
<param name="Rtabmap/TimeThr" type="string" value="700"/> <!-- 700 -->
<param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>
<param name="Optimizer/Slam2D" type="string" value="true"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="RGBD/OptimizeMaxError" type="string" value="1"/>
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
</group>
<!-- Visualisation RTAB-Map -->
<!--
<group ns="rtabmap">
<node pkg="rtabmap_viz" type="rtabmap_viz" name="rtabmap_viz" args="-d $(find rtabmap_viz)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="queue_size" type="int" value="10"/>
<param name="frame_id" type="string" value="chassis"/>
<remap from="left/image_rect" to="/stereo/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo/right/image_rect"/>
<remap from="left/camera_info" to="/stereo/left/camera_info"/>
<remap from="right/camera_info" to="/stereo/right/camera_info"/>
<remap from="odom_info" to="/stereo/odom_info"/>
<remap from="odom" to="/stereo/odom"/>
</node>
</group> -->
<!-- <remap from="odom_info" to="/stereo/odom_info"/> -->
<!-- <remap from="odom" to="/stereo/odom"/> --> <!-- these goes insinde rtabmap_viz -->
<!-- Visualisation RVIZ -->
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_demos)/launch/config/demo_stereo_outdoor.rviz"/>
</launch>
What are the parameters should I choose since I always get wrong loop closure detection error. After spending more time in creating a map in a single run. The update time becomes very large the my computer barely run and states the error of odom transformation lost.
What are the parameters should I tweak to get rid of this error ? Thanks.
| Free forum by Nabble | Edit this page |