Re: Did not receive message for 5 seconds, but message are published.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Did-not-receive-message-for-5-seconds-but-message-are-published-tp9786p9831.html
Here some observations:
* I would remove Vis/MaxDepth and Kp/MaxDepth, they are limiting too much the features extracted to find visual loop closures:

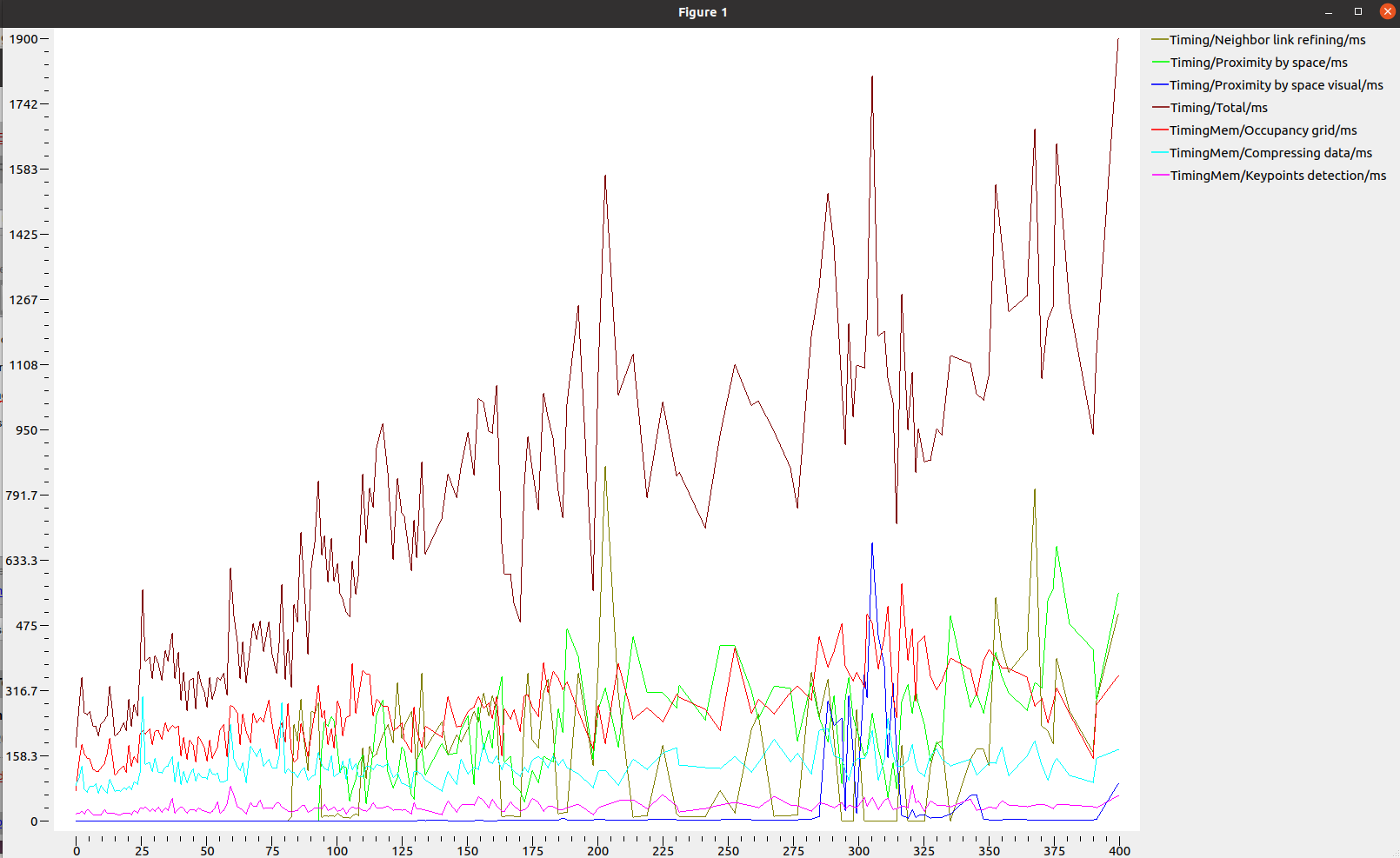
* Here are the steps using the most computation time (with "total" including all those durations):
Which kind of computer is it running on?
If you don't care about the RGB/depth images, you can set Mem/BinDataKept to false to save on compression time.
Do you really need "RGBD/NeighborLinkRefining"? If you are using icp_odometry, that could be removed to save more time.
RGBD/ProximityMaxPaths could be set to 1 to reduce proximity detection time.
Do you need a 3D occupancy grid, or a projected 2D one could be fine? You would save a lot on grid creation with Grid/3D=false
You may increase Icp/VoxelSize to 0.15 or 0.20 m if you are on a constrained computer, this will save time everytime ICP is done.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Did-not-receive-message-for-5-seconds-but-message-are-published-tp9786p9831.html
Here some observations:
* I would remove Vis/MaxDepth and Kp/MaxDepth, they are limiting too much the features extracted to find visual loop closures:
* Here are the steps using the most computation time (with "total" including all those durations):
Which kind of computer is it running on?
If you don't care about the RGB/depth images, you can set Mem/BinDataKept to false to save on compression time.
Do you really need "RGBD/NeighborLinkRefining"? If you are using icp_odometry, that could be removed to save more time.
RGBD/ProximityMaxPaths could be set to 1 to reduce proximity detection time.
Do you need a 3D occupancy grid, or a projected 2D one could be fine? You would save a lot on grid creation with Grid/3D=false
You may increase Icp/VoxelSize to 0.15 or 0.20 m if you are on a constrained computer, this will save time everytime ICP is done.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |