Re: How to have nice cloudpoint of depth sensor?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-have-nice-cloudpoint-of-depth-sensor-tp9823p9856.html
I think the main problem is that the lidar is giving max range data instead of NaN for invalid values, which makes ICP not working correctly:
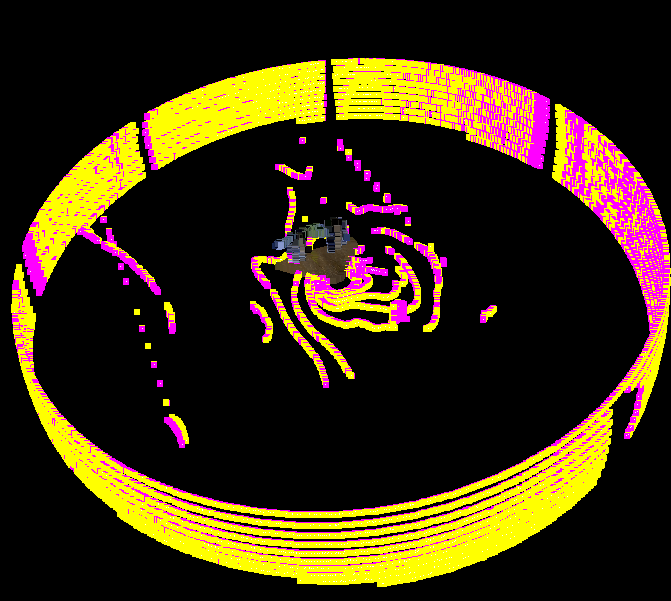
By adding Icp/RangeMax, the resulting point cloud is a lot better:
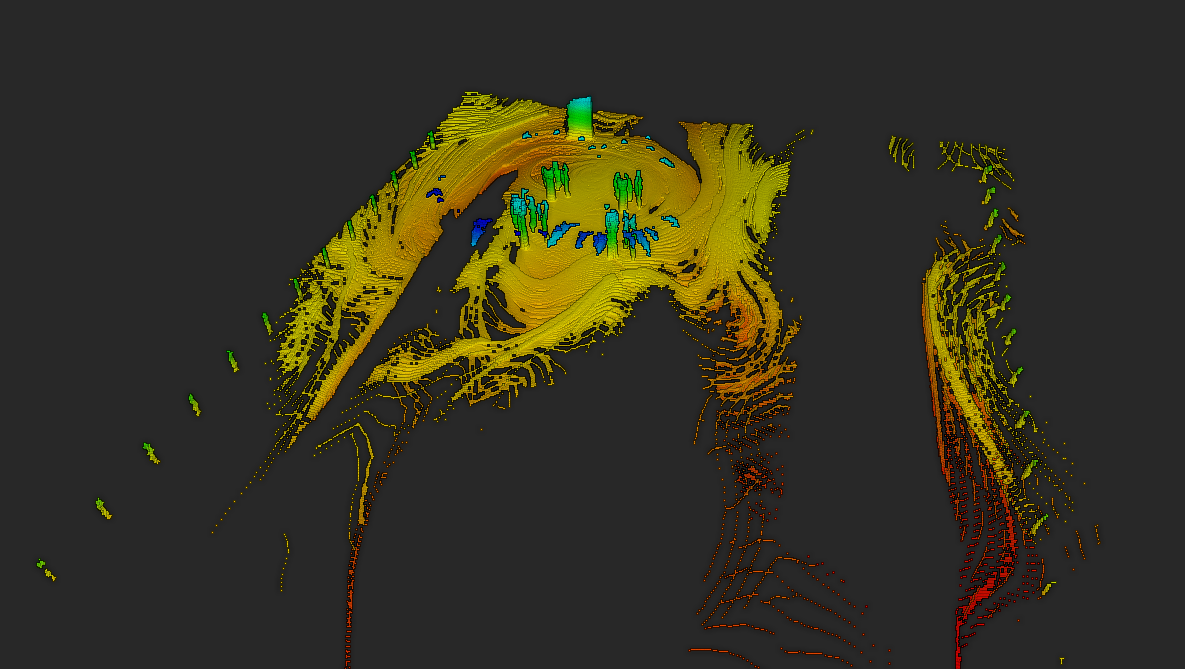
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-have-nice-cloudpoint-of-depth-sensor-tp9823p9856.html
I think the main problem is that the lidar is giving max range data instead of NaN for invalid values, which makes ICP not working correctly:
By adding Icp/RangeMax, the resulting point cloud is a lot better:
cheers,
Mathieu
| Free forum by Nabble | Edit this page |