Re: The problem is with running the euroc_datasets.launch file.
Posted by ground on
URL: http://official-rtab-map-forum.206.s1.nabble.com/The-problem-is-with-running-the-euroc-datasets-launch-file-tp9873p9883.html
Thank you for your reply. I found the answer in your response to questions from others and solved the problem.
However, I have encountered other issues. I am now trying to use stereo cameras with IMU for rtabmap odometry. I am using the D455 camera.
After running the command "roslaunch rtabmap_launch rtabmap.launch rtabmap_args:="--delete_db_on_start" left_image_topic:=/stereo/left/image_raw right_image_topic:=/stereo/right/image_raw left_camera_info_topic:=/stereo/left/camera_info right_camera_info_topic:=/stereo/right/camera_info stereo:=true wait_imu_to_init:=true imu_topic:=/rtabmap/imu",
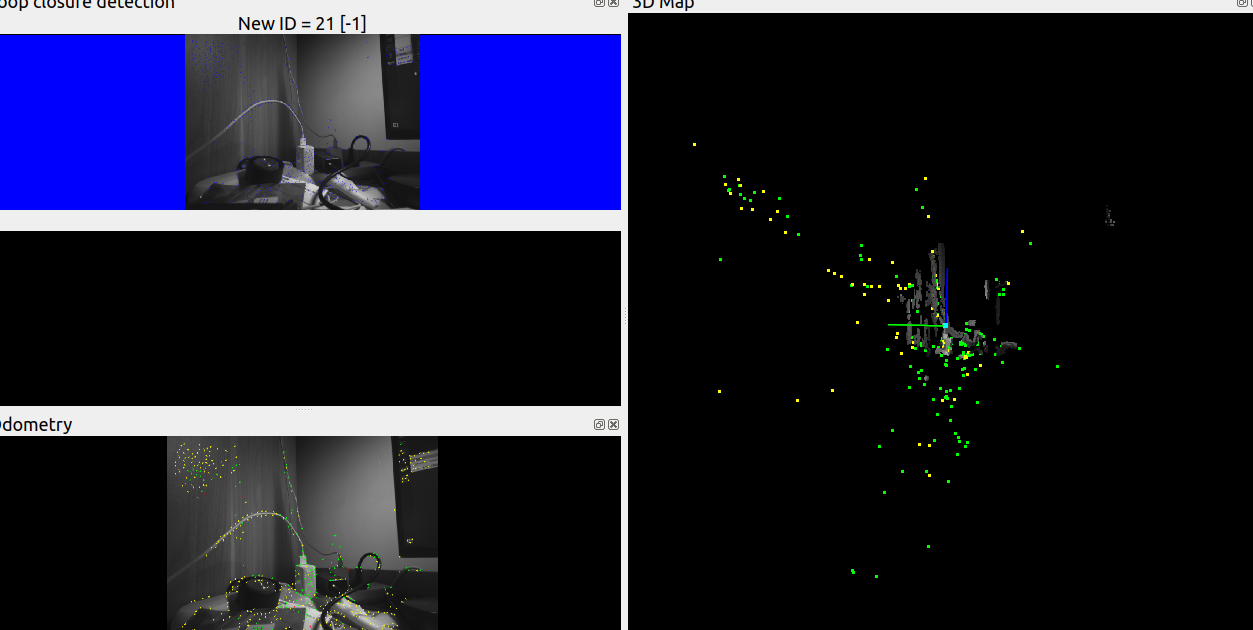
a window pops up with content,
[ INFO] [1703421440.284319928]: Odom: quality=262, std dev=0.023027m|0.060975rad, update time=0.068732s
[ INFO] [1703421440.344247606]: Odom: quality=263, std dev=0.025200m|0.060330rad, update time=0.057547s
[ INFO] [1703421440.408446842]: Odom: quality=245, std dev=0.027512m|0.062208rad, update time=0.062801s
[ INFO] [1703421440.468802214]: Odom: quality=271, std dev=0.025105m|0.060330rad, update time=0.058901s
[ INFO] [1703421440.532898508]: Odom: quality=246, std dev=0.025510m|0.060975rad, update time=0.057006s
[ INFO] [1703421440.602631941]: Odom: quality=248, std dev=0.025627m|0.064474rad, update time=0.059362s
[ INFO] [1703421440.668927937]: Odom: quality=240, std dev=0.025168m|0.064474rad, update time=0.059415s
[ INFO] [1703421440.733355469]: Odom: quality=255, std dev=0.029201m|0.060975rad, update time=0.057126s
but after slight movement, the following errors and warnings appear.
[ERROR] (2023-12-24 20:37:30.458) Rtabmap.cpp:1348::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 1646 is ignored!
[ INFO] [1703421450.458865649]: rtabmap (96): Rate=1.00s, Limit=0.000s, Conversion=0.0013s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=12, WM=12)
[ WARN] (2023-12-24 20:37:30.490) Features2d.cpp:837::generateKeypoints3D() A large number (527/822) of stereo correspondences are rejected! Optical flow may have failed because images are not calibrated, the background is too far (no disparity between the images), maximum disparity may be too small (128.000000) or that exposure between left and right images is too different.
[ WARN] (2023-12-24 20:37:30.539) OdometryF2M.cpp:566::computeTransform() Registration failed: "Not enough inliers 10/20 (matches=73) between -1 and 1239" (guess=xyz=0.000000,0.000000,0.000000 rpy=0.092260,0.057604,-0.533286)
[ WARN] (2023-12-24 20:37:30.539) OdometryF2M.cpp:314::computeTransform() Failed to find a transformation with the provided guess (xyz=0.000000,0.000000,0.000000 rpy=0.092260,0.057604,-0.533286), trying again without a guess.
[ WARN] (2023-12-24 20:37:30.628) OdometryF2M.cpp:556::computeTransform() Trial with no guess still fail.
I'm puzzled why it still shows me in RGB-D mode, even though I have already made modifications in the rtabmap.launch file. How can I correctly provide odometry?
Thanks
URL: http://official-rtab-map-forum.206.s1.nabble.com/The-problem-is-with-running-the-euroc-datasets-launch-file-tp9873p9883.html
Thank you for your reply. I found the answer in your response to questions from others and solved the problem.
However, I have encountered other issues. I am now trying to use stereo cameras with IMU for rtabmap odometry. I am using the D455 camera.
After running the command "roslaunch rtabmap_launch rtabmap.launch rtabmap_args:="--delete_db_on_start" left_image_topic:=/stereo/left/image_raw right_image_topic:=/stereo/right/image_raw left_camera_info_topic:=/stereo/left/camera_info right_camera_info_topic:=/stereo/right/camera_info stereo:=true wait_imu_to_init:=true imu_topic:=/rtabmap/imu",
a window pops up with content,
[ INFO] [1703421440.284319928]: Odom: quality=262, std dev=0.023027m|0.060975rad, update time=0.068732s
[ INFO] [1703421440.344247606]: Odom: quality=263, std dev=0.025200m|0.060330rad, update time=0.057547s
[ INFO] [1703421440.408446842]: Odom: quality=245, std dev=0.027512m|0.062208rad, update time=0.062801s
[ INFO] [1703421440.468802214]: Odom: quality=271, std dev=0.025105m|0.060330rad, update time=0.058901s
[ INFO] [1703421440.532898508]: Odom: quality=246, std dev=0.025510m|0.060975rad, update time=0.057006s
[ INFO] [1703421440.602631941]: Odom: quality=248, std dev=0.025627m|0.064474rad, update time=0.059362s
[ INFO] [1703421440.668927937]: Odom: quality=240, std dev=0.025168m|0.064474rad, update time=0.059415s
[ INFO] [1703421440.733355469]: Odom: quality=255, std dev=0.029201m|0.060975rad, update time=0.057126s
but after slight movement, the following errors and warnings appear.
[ERROR] (2023-12-24 20:37:30.458) Rtabmap.cpp:1348::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 1646 is ignored!
[ INFO] [1703421450.458865649]: rtabmap (96): Rate=1.00s, Limit=0.000s, Conversion=0.0013s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=12, WM=12)
[ WARN] (2023-12-24 20:37:30.490) Features2d.cpp:837::generateKeypoints3D() A large number (527/822) of stereo correspondences are rejected! Optical flow may have failed because images are not calibrated, the background is too far (no disparity between the images), maximum disparity may be too small (128.000000) or that exposure between left and right images is too different.
[ WARN] (2023-12-24 20:37:30.539) OdometryF2M.cpp:566::computeTransform() Registration failed: "Not enough inliers 10/20 (matches=73) between -1 and 1239" (guess=xyz=0.000000,0.000000,0.000000 rpy=0.092260,0.057604,-0.533286)
[ WARN] (2023-12-24 20:37:30.539) OdometryF2M.cpp:314::computeTransform() Failed to find a transformation with the provided guess (xyz=0.000000,0.000000,0.000000 rpy=0.092260,0.057604,-0.533286), trying again without a guess.
[ WARN] (2023-12-24 20:37:30.628) OdometryF2M.cpp:556::computeTransform() Trial with no guess still fail.
I'm puzzled why it still shows me in RGB-D mode, even though I have already made modifications in the rtabmap.launch file. How can I correctly provide odometry?
Thanks
| Free forum by Nabble | Edit this page |