Indoor Navigation using Realsense D455
Posted by danyal2075 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Indoor-Navigation-using-Realsense-D455-tp9893.html
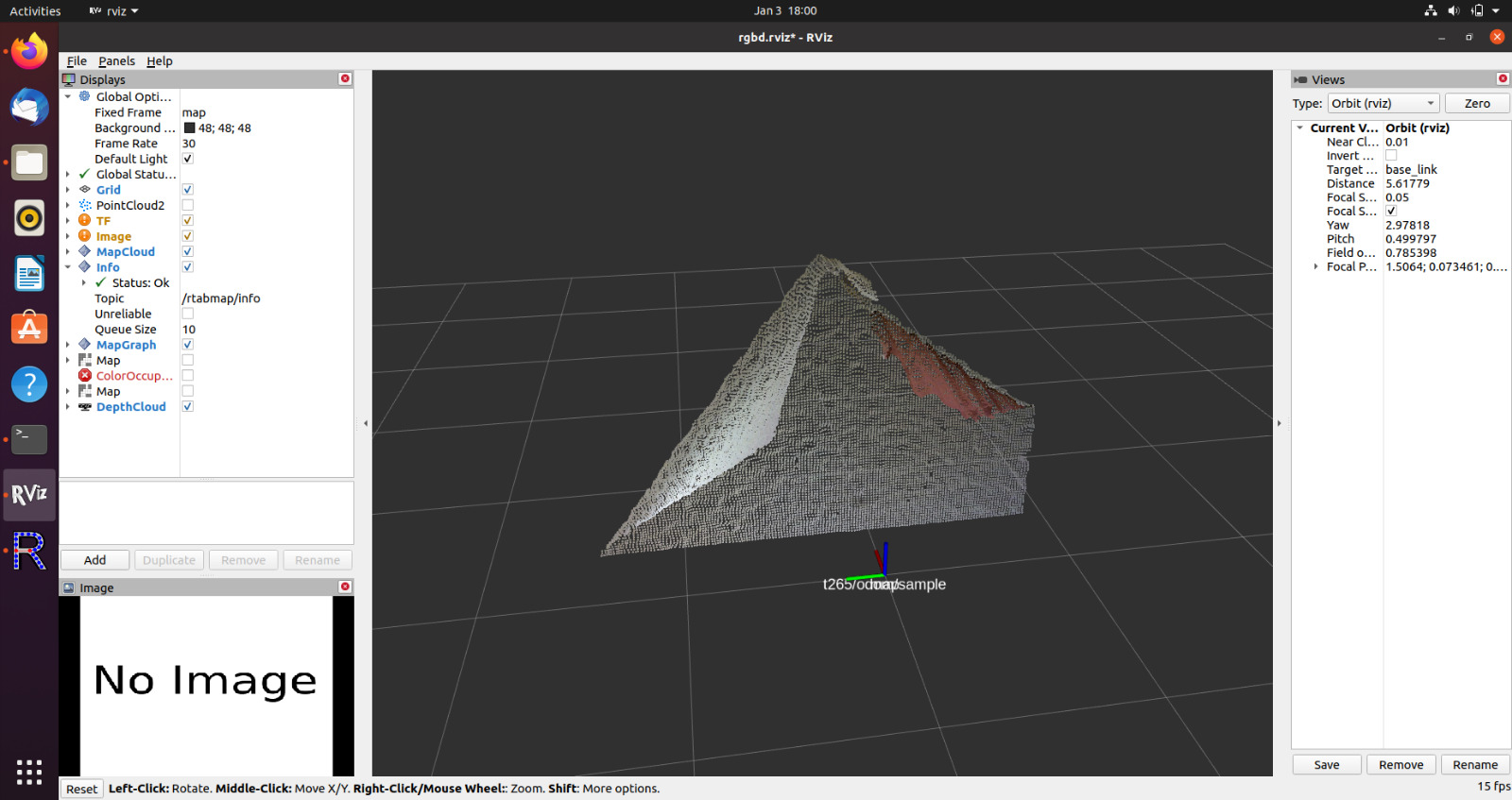
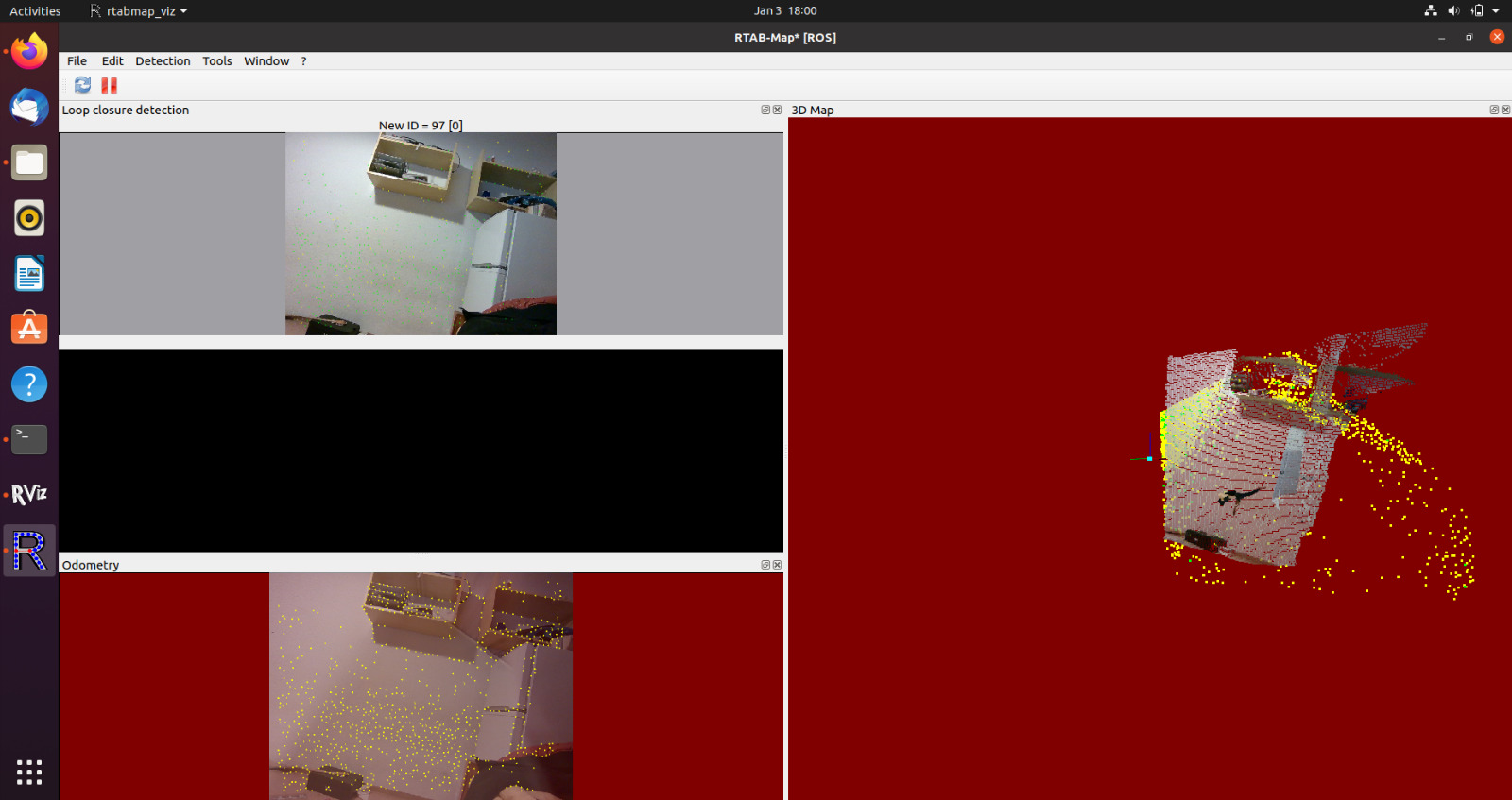
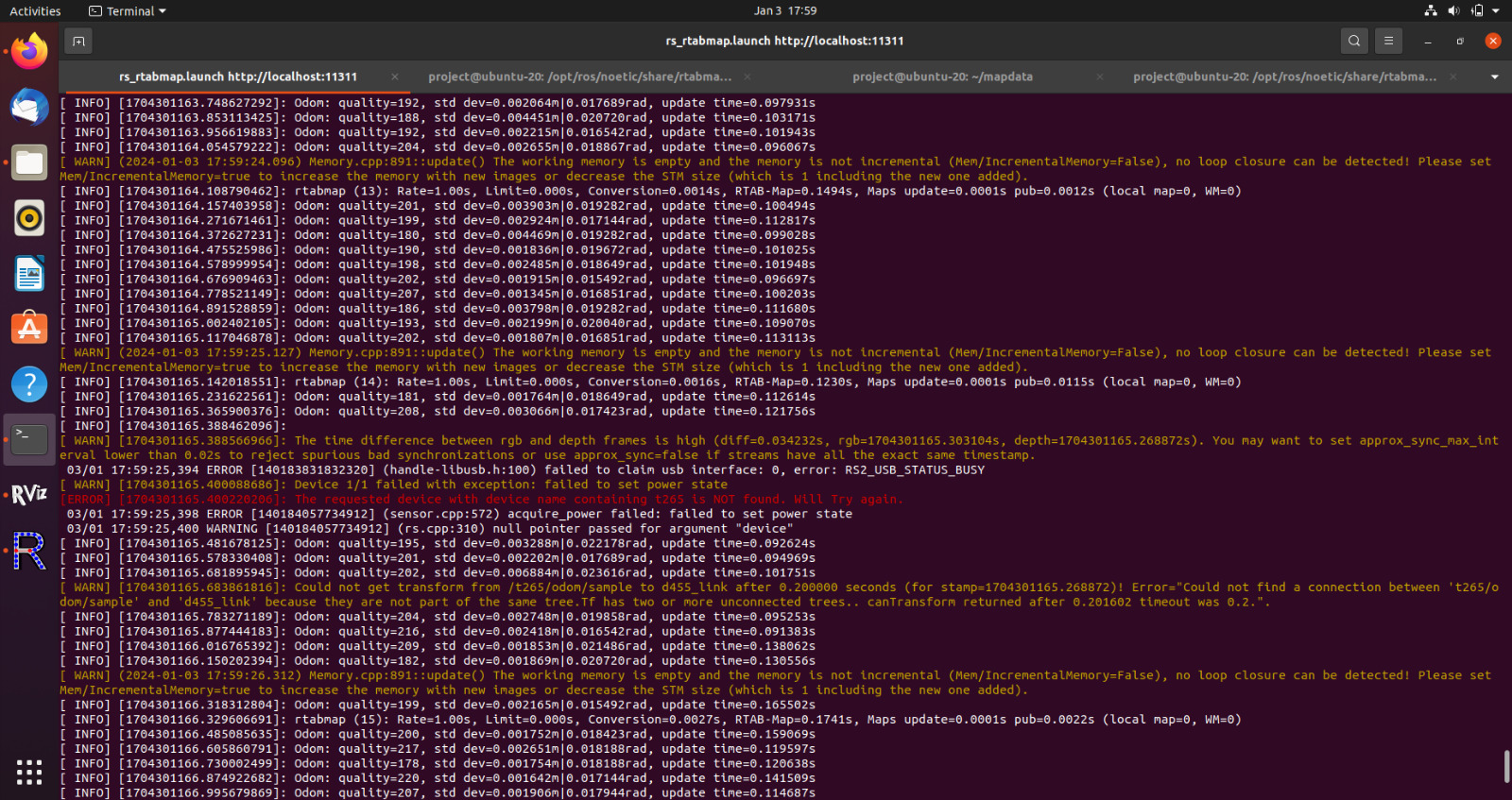
i am new using rtabmap, i have been trying for two month to create indoor map but i could not do it. i am going to share terminal screenshot, RVIZ, Rtabmap, lanuch file.
i am using ros1 neotic package and rtabmap to create map to avoid no go-areas.
i also donot get any data in database i mean map.
******* THis is my lanuch file ******
<launch>
<arg name="device_type_camera1" default="t265"/>
<arg name="device_type_camera2" default="d4.5"/>
<arg name="serial_no_camera1" default=""/>
<arg name="serial_no_camera2" default=""/>
<arg name="camera1" default="t265"/>
<arg name="camera2" default="d455"/>
<arg name="clip_distance" default="-2"/>
<arg name="use_rviz" default="true"/>
<arg name="use_rtabmapviz" default="true"/>
<include file="$(find realsense2_camera)/launch/rs_d400_and_t265.launch">
<arg name="device_type_camera1" value="$(arg device_type_camera1)"/>
<arg name="device_type_camera2" value="$(arg device_type_camera2)"/>
<arg name="serial_no_camera1" value="$(arg serial_no_camera1)"/>
<arg name="serial_no_camera2" value="$(arg serial_no_camera2)"/>
<arg name="camera1" value="$(arg camera1)"/>
<arg name="camera2" value="$(arg camera2)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="depth_topic" value="/$(arg camera2)/aligned_depth_to_color/image_raw"/>
<arg name="frame_id" value="$(arg camera2)_link"/>
<arg name="visual_odometry" value="true"/>
<arg name="odom_topic" value="/$(arg camera1)/odom/sample"/>
<arg name="rgb_topic" value="/$(arg camera2)/color/image_raw"/>
<arg name="camera_info_topic" value="/$(arg camera2)/color/camera_info"/>
<arg name="queue_size" value="200"/>
<arg name="rviz" value="$(arg use_rviz)"/>
<arg name="rtabmapviz" value="$(arg use_rtabmapviz)"/>
<arg name="localization" value="true"/>
</include>
</launch>
URL: http://official-rtab-map-forum.206.s1.nabble.com/Indoor-Navigation-using-Realsense-D455-tp9893.html
i am new using rtabmap, i have been trying for two month to create indoor map but i could not do it. i am going to share terminal screenshot, RVIZ, Rtabmap, lanuch file.
i am using ros1 neotic package and rtabmap to create map to avoid no go-areas.
i also donot get any data in database i mean map.
******* THis is my lanuch file ******
<launch>
<arg name="device_type_camera1" default="t265"/>
<arg name="device_type_camera2" default="d4.5"/>
<arg name="serial_no_camera1" default=""/>
<arg name="serial_no_camera2" default=""/>
<arg name="camera1" default="t265"/>
<arg name="camera2" default="d455"/>
<arg name="clip_distance" default="-2"/>
<arg name="use_rviz" default="true"/>
<arg name="use_rtabmapviz" default="true"/>
<include file="$(find realsense2_camera)/launch/rs_d400_and_t265.launch">
<arg name="device_type_camera1" value="$(arg device_type_camera1)"/>
<arg name="device_type_camera2" value="$(arg device_type_camera2)"/>
<arg name="serial_no_camera1" value="$(arg serial_no_camera1)"/>
<arg name="serial_no_camera2" value="$(arg serial_no_camera2)"/>
<arg name="camera1" value="$(arg camera1)"/>
<arg name="camera2" value="$(arg camera2)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="depth_topic" value="/$(arg camera2)/aligned_depth_to_color/image_raw"/>
<arg name="frame_id" value="$(arg camera2)_link"/>
<arg name="visual_odometry" value="true"/>
<arg name="odom_topic" value="/$(arg camera1)/odom/sample"/>
<arg name="rgb_topic" value="/$(arg camera2)/color/image_raw"/>
<arg name="camera_info_topic" value="/$(arg camera2)/color/camera_info"/>
<arg name="queue_size" value="200"/>
<arg name="rviz" value="$(arg use_rviz)"/>
<arg name="rtabmapviz" value="$(arg use_rtabmapviz)"/>
<arg name="localization" value="true"/>
</include>
</launch>
| Free forum by Nabble | Edit this page |