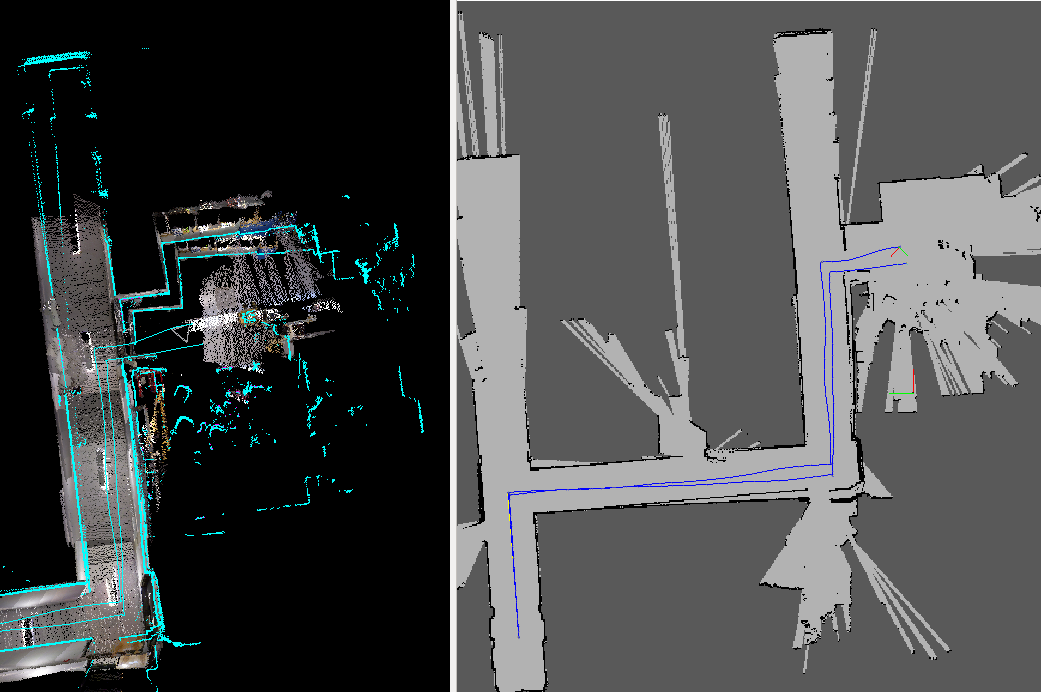
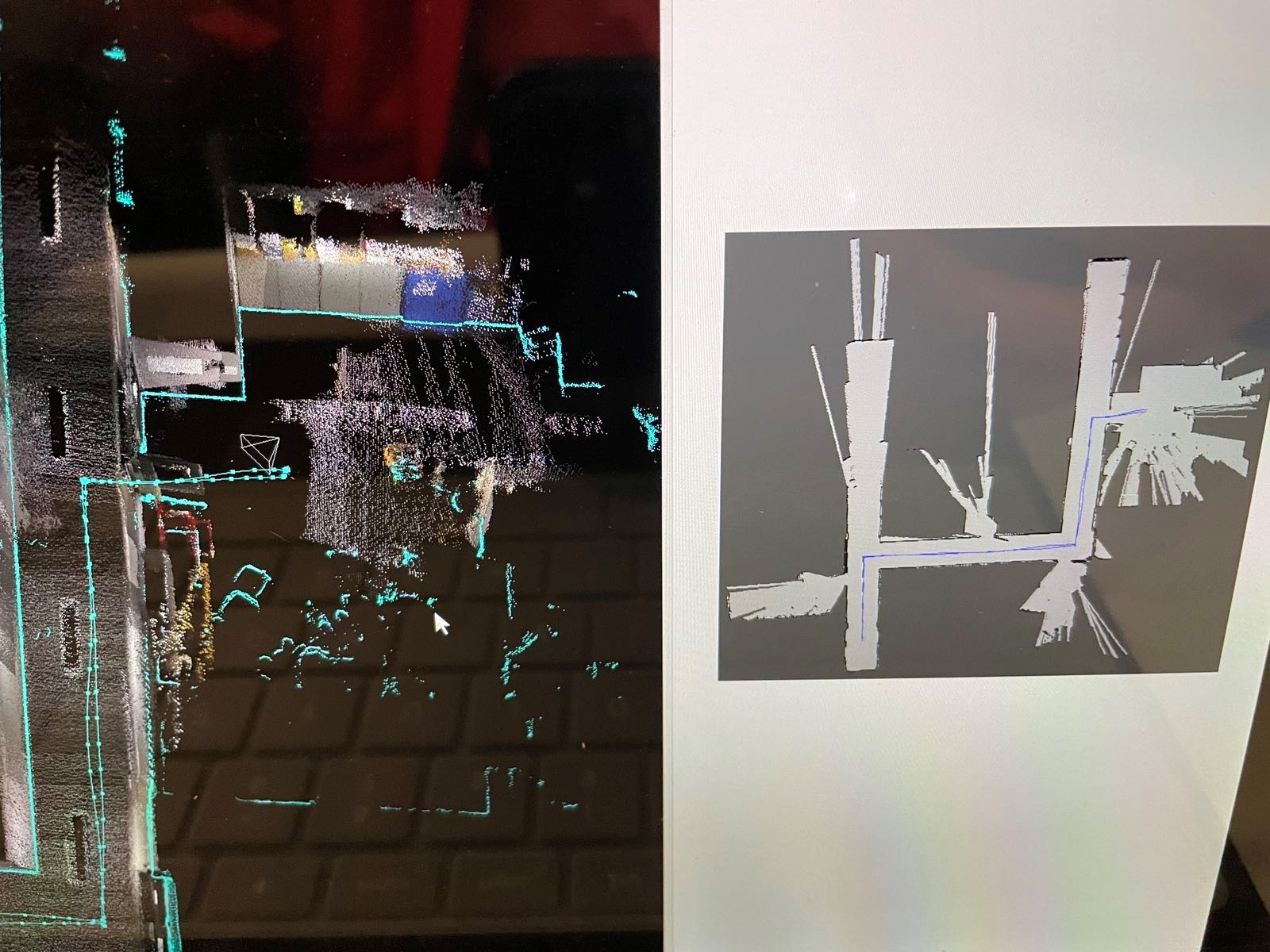
the results are different on VMware ubuntu 16.04 and ubuntu 16.04 computer

the results are different on VMware ubuntu 16.04 and ubuntu 16.04 computer

|
Re: the results are different on VMware ubuntu 16.04 and ubuntu 16.04 computer
|
Administrator
|
| Free forum by Nabble | Edit this page |