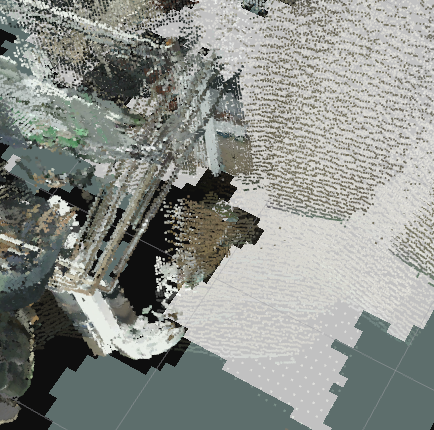
the same object's point cloud can't aligned well after rotate a few times

the same object's point cloud can't aligned well after rotate a few times

|
Re: the same object's point cloud can't aligned well after rotate a few times
|
Administrator
|
Re: the same object's point cloud can't aligned well after rotate a few times
|
|
Re: the same object's point cloud can't aligned well after rotate a few times
|
Administrator
|
Re: the same object's point cloud can't aligned well after rotate a few times
|
|
Re: the same object's point cloud can't aligned well after rotate a few times
|
Administrator
|
| Free forum by Nabble | Edit this page |