use RTABMAP with c++


|
hello, im a new user of RTABMAP and Ubuntu
im trying use rtabmap code with a new "myproject" like the link "https://github.com/introlab/rtabmap/wiki/Cplusplus-RGBD-Mapping" but when i make , something wrong with util3d_filtering.h : no such file or directory i check rtabmap/core it exist util3d_filtering.h , so i didnt know what happened? and i make rtabmap/examples/RGBDMapping , has the same problem. can something help me , thx 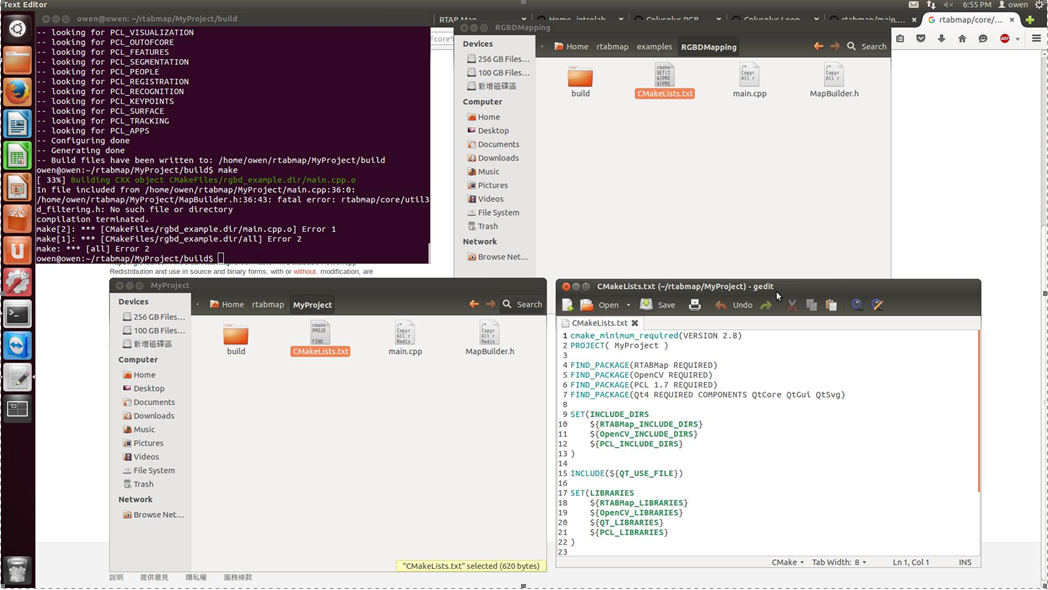
|
|
Administrator
|
Hi,
You should put your project outside the rtabmap source tree. Rtabmap should be also installed ($ make install) so that your project can find it with CMake. Example: $ cd rtabmap/build $ cmake .. $ make $ sudo make install (by default rtabmap is installed in "/usr/local") $ cd ~$ mkdir test ~$ cd test ~/test$ wget https://raw.githubusercontent.com/wiki/introlab/rtabmap/doc/Tutorials/CplusplusExampleRGBD/CMakeLists.txt ~/test$ wget https://raw.githubusercontent.com/introlab/rtabmap/master/examples/RGBDMapping/main.cpp ~/test$ wget https://raw.githubusercontent.com/introlab/rtabmap/master/examples/RGBDMapping/MapBuilder.h ~/test$ cmake . -- The C compiler identification is GNU 4.8.4 -- The CXX compiler identification is GNU 4.8.4 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- checking for module 'eigen3' -- found eigen3, version 3.2.0 -- Found eigen: /usr/include/eigen3 -- Boost version: 1.54.0 -- Found the following Boost libraries: -- system -- filesystem -- thread -- date_time -- iostreams -- serialization -- checking for module 'openni-dev' -- package 'openni-dev' not found -- Found openni: /usr/lib/libOpenNI.so -- Found libusb-1.0: /usr/include -- checking for module 'flann' -- found flann, version 1.8.4 -- Found Flann: /usr/lib/x86_64-linux-gnu/libflann_cpp_s.a -- checking for module 'openni-dev' -- package 'openni-dev' not found -- Found qhull: /usr/lib/x86_64-linux-gnu/libqhull.so -- checking for module 'openni-dev' -- package 'openni-dev' not found -- looking for PCL_COMMON -- Found PCL_COMMON: /usr/lib/libpcl_common.so -- looking for PCL_OCTREE -- Found PCL_OCTREE: /usr/lib/libpcl_octree.so -- looking for PCL_IO -- Found PCL_IO: /usr/lib/libpcl_io.so -- looking for PCL_KDTREE -- Found PCL_KDTREE: /usr/lib/libpcl_kdtree.so -- looking for PCL_SEARCH -- Found PCL_SEARCH: /usr/lib/libpcl_search.so -- looking for PCL_SAMPLE_CONSENSUS -- Found PCL_SAMPLE_CONSENSUS: /usr/lib/libpcl_sample_consensus.so -- looking for PCL_FILTERS -- Found PCL_FILTERS: /usr/lib/libpcl_filters.so -- looking for PCL_FEATURES -- Found PCL_FEATURES: /usr/lib/libpcl_features.so -- looking for PCL_KEYPOINTS -- Found PCL_KEYPOINTS: /usr/lib/libpcl_keypoints.so -- looking for PCL_GEOMETRY -- Found PCL_GEOMETRY: /usr/include/pcl-1.7 -- looking for PCL_SEGMENTATION -- Found PCL_SEGMENTATION: /usr/lib/libpcl_segmentation.so -- looking for PCL_VISUALIZATION -- Found PCL_VISUALIZATION: /usr/lib/libpcl_visualization.so -- looking for PCL_OUTOFCORE -- Found PCL_OUTOFCORE: /usr/lib/libpcl_outofcore.so -- looking for PCL_REGISTRATION -- Found PCL_REGISTRATION: /usr/lib/libpcl_registration.so -- looking for PCL_RECOGNITION -- Found PCL_RECOGNITION: /usr/lib/libpcl_recognition.so -- looking for PCL_SURFACE -- Found PCL_SURFACE: /usr/lib/libpcl_surface.so -- looking for PCL_PEOPLE -- Found PCL_PEOPLE: /usr/lib/libpcl_people.so -- looking for PCL_TRACKING -- Found PCL_TRACKING: /usr/lib/libpcl_tracking.so -- looking for PCL_APPS -- Found PCL_APPS: /usr/lib/libpcl_apps.so -- Found PCL: .... -- Looking for Q_WS_X11 -- Looking for Q_WS_X11 - found -- Looking for Q_WS_WIN -- Looking for Q_WS_WIN - not found -- Looking for Q_WS_QWS -- Looking for Q_WS_QWS - not found -- Looking for Q_WS_MAC -- Looking for Q_WS_MAC - not found -- Found Qt4: /usr/bin/qmake (found version "4.8.6") -- Configuring done -- Generating done -- Build files have been written to: /home/mathieu/test ~/test$ make [ 33%] Generating moc_MapBuilder.cxx Scanning dependencies of target rgbd_example [ 66%] Building CXX object CMakeFiles/rgbd_example.dir/main.cpp.o [100%] Building CXX object CMakeFiles/rgbd_example.dir/moc_MapBuilder.cxx.o Linking CXX executable rgbd_example [100%] Built target rgbd_example ~/test$ ./rgbd_example Usage: rtabmap-rgbd_mapping driver driver Driver number to use: 0=OpenNI-PCL, 1=OpenNI2, 2=Freenect, 3=OpenNI-CV, 4=OpenNI-CV-ASUS cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |