Hi Mathieu,
I am very grateful for your assistance ..
I am sorry i should have explained more about what i am exactly trying to do. The plan is to map the entire environment, (the robot will operate in whole floor with dozen rooms) and then use the saved map for autonomous navigation to certain setpoints.
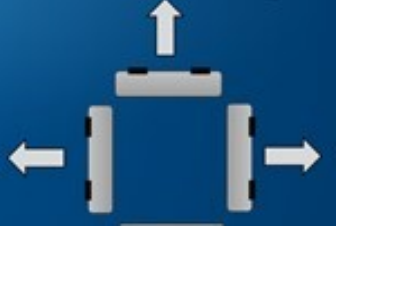
The 3 depth cameras are placed in a pi configuration (front - left and right D435i cams). The problem I am facing now is that rtabmap is making false loop closure detection by comparing a current camera observations with observations recorded by another camera.
For example, if camera A is observing the same view previously recorded by camera B, a loop closure is detected without making any transformation. this results in wrong localization (I could tolerate few centimeters of error but the orientation now has an error of 90 or 180 degrees).
How can i configure the loop closure mechanism to make the correct transformation when this happens.
Also , I would really appreciate your advice about these other issues:
- 3d to 2d mapping: does this have anything to do with rtabmap or should I look into other tools? do you have any recommendations regarding this matter? I am planning to use the 2D mapping for obstacle avoidance and path planning. I think it's much easier to do with 2D maps. Maybe I am wrong but most demos I checked online seem to use 2D maps for obstacle avoidance and path planning.
Thanks and best regards
note : i have changed and add some parameters after my last topic (new launch file in the link below) - if you can please take a look on them..
pi configuration of 3 D435 CAMERAS :
my launch file :
demo_3d_1t.demo_3d_1t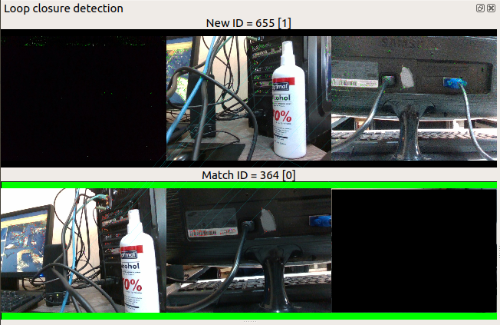
TOM SMITH

