Hi,
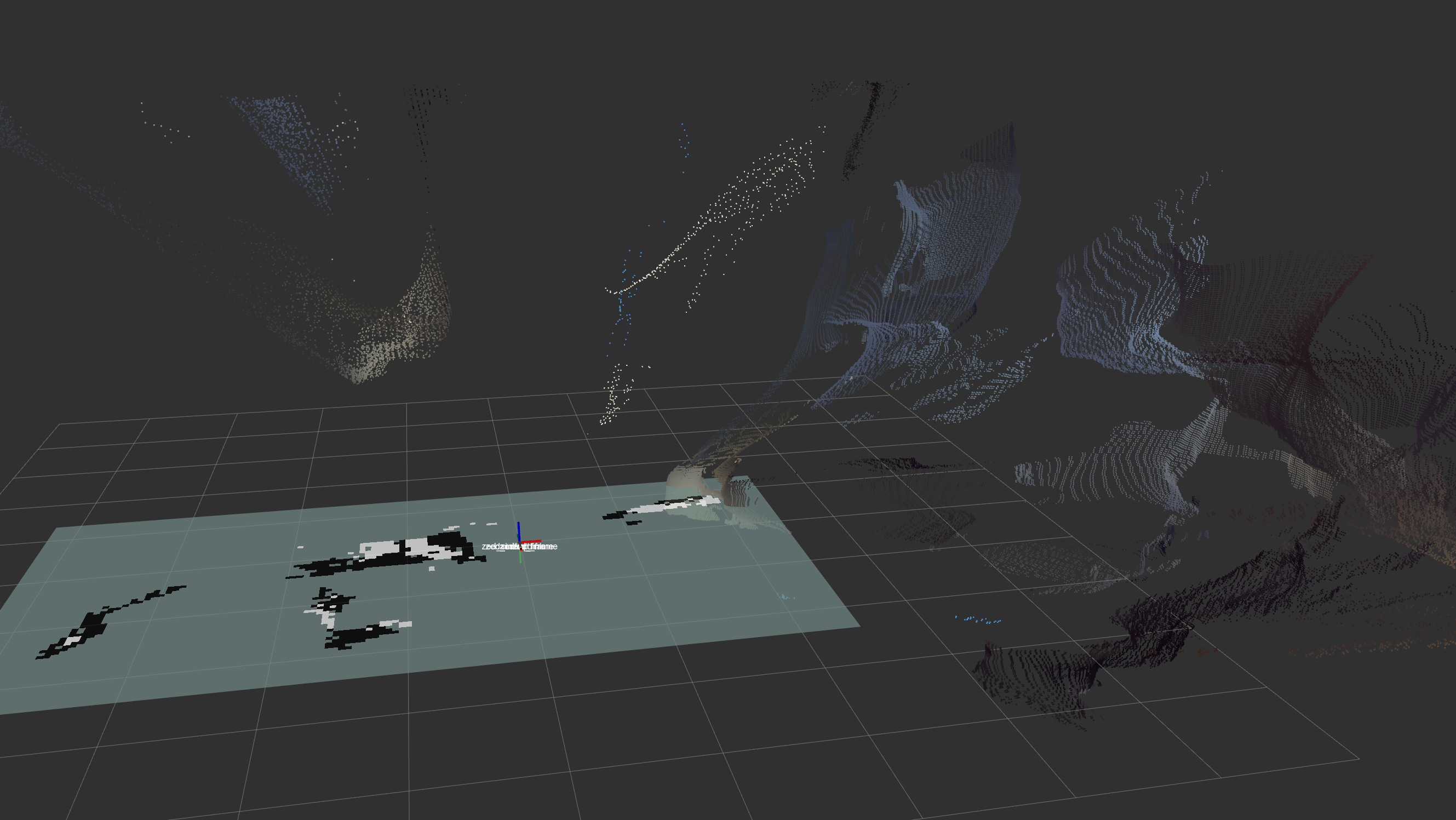
I was too, trying to run rtabmap with zed odometry and i stumble on the upward cloud problem.
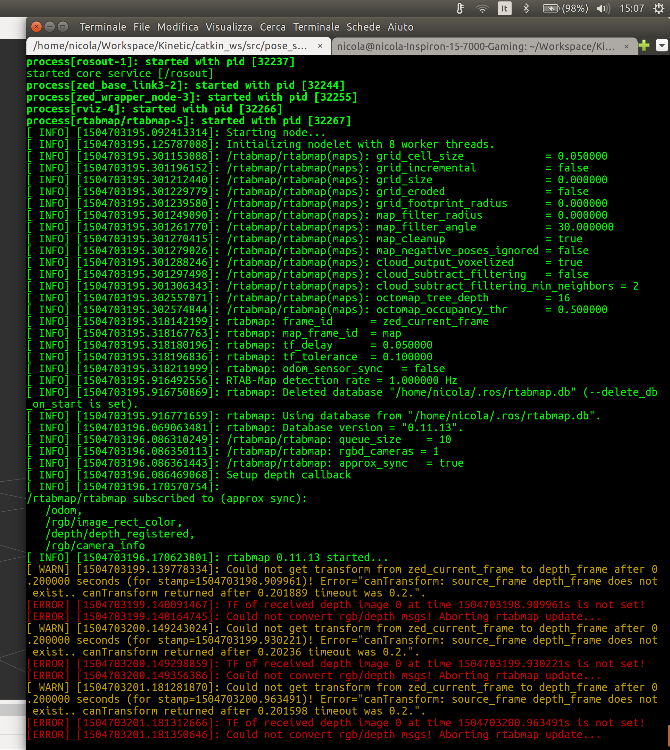
I tried this setup with the latest versions of wrapper and sdk, but i'm still recieving this message,
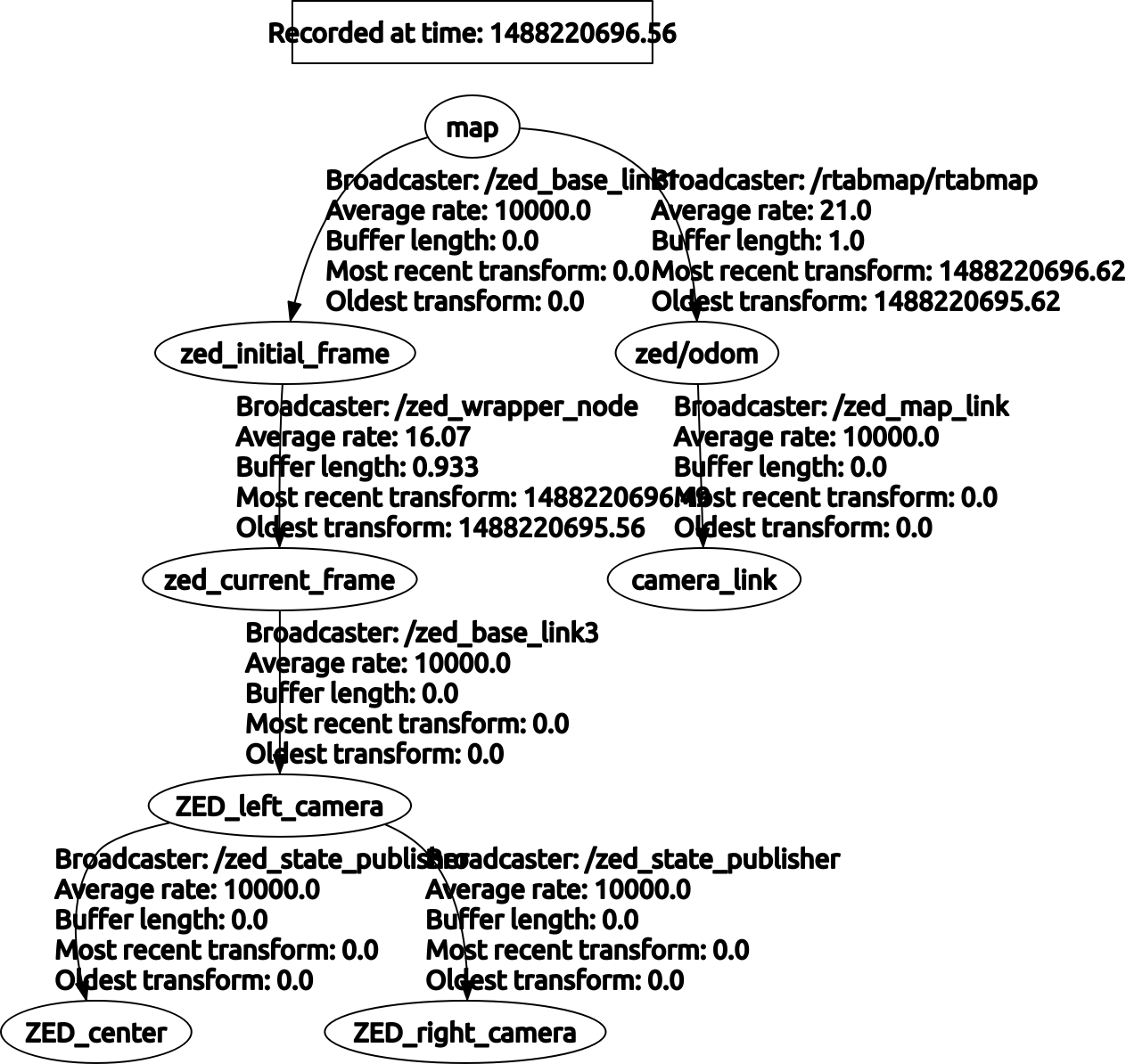
i think i'm missing a static transform or some default frame name has changed since the version you are showing
Thank you very much
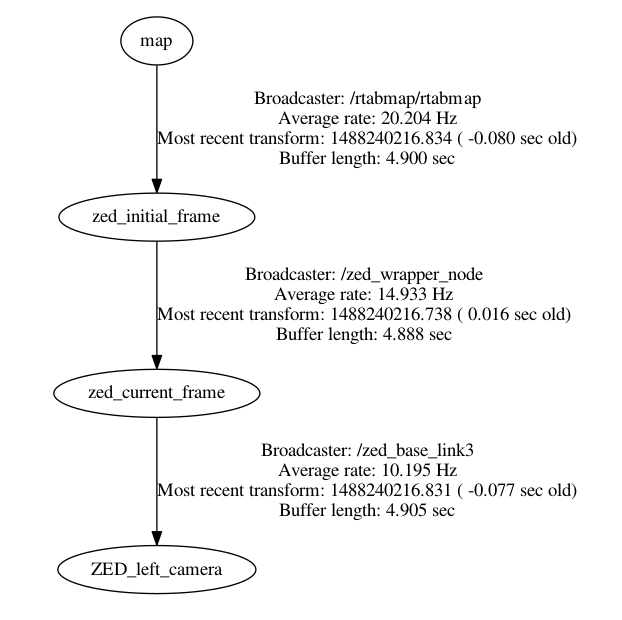
EDIT: Eureka, it works! I needed to add some other transform and specify some other values, here's my launch file:
<launch>
<arg name="camera" default="zed"/>
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2)" />
<arg name="no_rotate" value="0 0 0 0 0 0 1" />
<arg name="tf_prefix" default="" />
<arg name="stereo_namespace" default="zed"/>
<node pkg="tf" type="static_transform_publisher" name="$(arg camera)_base_link3"
args="$(arg optical_rotate) $(arg camera)_current_frame ZED_left_camera 100" />
<node pkg="tf2_ros" type="static_transform_publisher" name="zed_base_link4"
args="0 0 1.0 -$(arg pi/2) 0 -$(arg pi/2) $(arg tf_prefix)/zed_current_frame depth_frame" />
<node name="zed_wrapper_node" pkg="zed_wrapper" type="zed_wrapper_node">
<param name="odometry_frame" value="zed_initial_frame" />
<param name="base_frame" value="zed_current_frame" />
</node>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="$(arg camera)_current_frame"/>
<remap from="rgb/image" to="/rgb/image_rect_color"/>
<remap from="depth/image" to="/depth/depth_registered"/>
<remap from="rgb/camera_info" to="/rgb/camera_info"/>
<remap from="odom" to="/odom"/>
<param name="odom_frame_id" value=""/>
</node>
</launch>