zed camera issues with rviz


|
i can visualize zed in rtabmapviz zed but that is note valable for rviz i tried sevral times with all proposition in rtabmap tutorial but i still get the same error
[ WARN] [1517244647.914949932]: /rtabmap/stereo_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/stereo_odometry subscribed to (exact sync): /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info |
|
Administrator
|
In the stereo tutorial,
the zed is launched in "stereo_camera" namespace instead of "camera": cheers, Mathieu |
|
|
yeah when i opened the rviz i got the
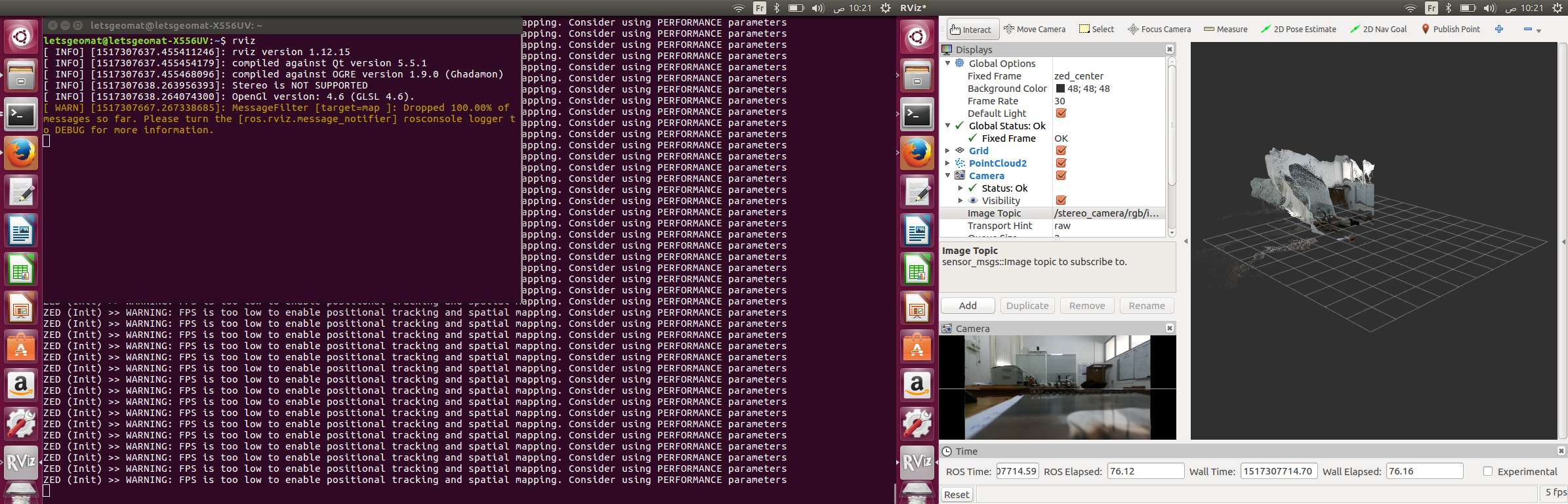 also this error ZED (Init) >> WARNING: FPS is too low to enable positional tracking and spatial mapping. Consider using PERFORMANCE parameters and when i try mapping i keep got the old warning |
|
Administrator
|
Can you write down exactly every commands you used to bringup zed and rtabmap so I can test on my side which step is problematic?
The rviz warning is something else. For the zed warning, it says what it says :P Note that with rtabmap, you don't need positional tracking from zed. However, a high FPS is also required for rtabmap. What is your machine? cheers, Mathieu |
|
|
$ export ROS_NAMESPACE=stereo_camera
$ roslaunch zed_wrapper zed_camera.launch publish_tf:=false $ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true my machine is asus R558U i use ubuntu 16.04 kinetic |
|
|
is enough or i have to add some information :)
|
|
Administrator
|
This post was updated on .
Copy/pasted your lines and it works on my computer.
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.12
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_stereo: True
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: False
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: False
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_stereo: True
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
* /rtabmap/stereo_odometry/approx_sync: False
* /rtabmap/stereo_odometry/config_path:
* /rtabmap/stereo_odometry/frame_id: camera_link
* /rtabmap/stereo_odometry/queue_size: 10
* /rtabmap/stereo_odometry/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
stereo_odometry (rtabmap_ros/stereo_odometry)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/stereo_odometry-1]: started with pid [26811]
process[rtabmap/rtabmap-2]: started with pid [26812]
process[rtabmap/rtabmapviz-3]: started with pid [26813]
[ INFO] [1517363566.024253797]: Starting node...
[ INFO] [1517363566.254956512]: /rtabmap/rtabmap(maps): grid_cell_size = 0.050000
[ INFO] [1517363566.254998347]: /rtabmap/rtabmap(maps): grid_incremental = false
[ INFO] [1517363566.255038715]: /rtabmap/rtabmap(maps): grid_size = 0.000000
[ INFO] [1517363566.255066511]: /rtabmap/rtabmap(maps): grid_eroded = false
[ INFO] [1517363566.255102899]: /rtabmap/rtabmap(maps): grid_footprint_radius = 0.000000
[ INFO] [1517363566.255130416]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1517363566.255170644]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1517363566.255195996]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1517363566.255227355]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false
[ INFO] [1517363566.255261088]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1517363566.255291469]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1517363566.255317589]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1517363566.257471343]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1517363566.257512410]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000
[ INFO] [1517363566.299195134]: rtabmap: frame_id = camera_link
[ INFO] [1517363566.299240461]: rtabmap: map_frame_id = map
[ INFO] [1517363566.299259318]: rtabmap: tf_delay = 0.050000
[ INFO] [1517363566.299279432]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1517363566.299295286]: rtabmap: odom_sensor_sync = false
[ INFO] [1517363566.301409160]: rtabmap: stereo_to_depth = false
[ INFO] [1517363566.324019941]: rtabmapviz: Using configuration from "/home/mathieu/.ros/rtabmap_gui.ini"
[ INFO] [1517363566.591981030]: Update odometry parameter "Stereo/MaxDisparity"="200" from arguments
[ INFO] [1517363566.592004287]: Update odometry parameter "Vis/CorFlowMaxLevel"="5" from arguments
[ INFO] [1517363566.628458233]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1517363566.629405275]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1517363566.721562226]:
/rtabmap/stereo_odometry subscribed to (exact sync):
/stereo_camera/left/image_rect_color,
/stereo_camera/right/image_rect_color,
/stereo_camera/left/camera_info,
/stereo_camera/right/camera_info
[ INFO] [1517363567.049504145]: Odom: quality=0, std dev=0.010000m|0.010000rad, update time=0.061019s
[ INFO] [1517363567.088944138]: Update RTAB-Map parameter "Stereo/MaxDisparity"="200" from arguments
[ INFO] [1517363567.088983668]: Update RTAB-Map parameter "Vis/CorFlowMaxLevel"="5" from arguments
[ INFO] [1517363567.151497837]: Odom: quality=25, std dev=0.002859m|0.003422rad, update time=0.096955s
[ INFO] [1517363567.257774104]: Odom: quality=216, std dev=0.000238m|0.000498rad, update time=0.099829s
[ INFO] [1517363567.368328893]: Odom: quality=248, std dev=0.000215m|0.000457rad, update time=0.102288s
[ INFO] [1517363567.469824620]: Odom: quality=295, std dev=0.000239m|0.000163rad, update time=0.095959s
[ INFO] [1517363567.527475767]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1517363567.528702103]: rtabmap: Deleted database "/home/mathieu/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1517363567.528747430]: rtabmap: Using database from "/home/mathieu/.ros/rtabmap.db".
[ INFO] [1517363567.547374417]: Odom: quality=306, std dev=0.000199m|0.000397rad, update time=0.072195s
[ INFO] [1517363567.621268951]: Odom: quality=301, std dev=0.000171m|0.000373rad, update time=0.071255s
[ INFO] [1517363567.635386520]: Reading parameters from the ROS server...
[ INFO] [1517363567.706716845]: Odom: quality=303, std dev=0.000194m|0.000467rad, update time=0.082311s
[ INFO] [1517363567.809915712]: Odom: quality=276, std dev=0.000168m|0.000356rad, update time=0.098457s
[ INFO] [1517363567.894966072]: Parameters read = 257
[ INFO] [1517363567.895028161]: Parameters successfully read.
[ INFO] [1517363567.896932862]: Odom: quality=300, std dev=0.000234m|0.000425rad, update time=0.083583s
[ INFO] [1517363567.975556602]: Odom: quality=301, std dev=0.000119m|0.000204rad, update time=0.075725s
[ INFO] [1517363568.056600260]: Odom: quality=308, std dev=0.000083m|0.000174rad, update time=0.077633s
[ INFO] [1517363568.138819480]: Odom: quality=292, std dev=0.000333m|0.000548rad, update time=0.079445s
[ INFO] [1517363568.191957508]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1517363568.192065762]: /rtabmap/rtabmapviz: rgbd_cameras = 1
[ INFO] [1517363568.192099076]: /rtabmap/rtabmapviz: approx_sync = false
[ INFO] [1517363568.192177367]: Setup stereo callback
[ INFO] [1517363568.262404626]: Odom: quality=310, std dev=0.000231m|0.000293rad, update time=0.120016s
[ INFO] [1517363568.297930386]:
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom,
/stereo_camera/left/image_rect_color,
/stereo_camera/right/image_rect_color,
/stereo_camera/left/camera_info,
/stereo_camera/right/camera_info,
/rtabmap/odom_info
[ INFO] [1517363568.298071814]: rtabmapviz started.
[ INFO] [1517363568.351333321]: Odom: quality=319, std dev=0.000201m|0.000183rad, update time=0.085150s
[ INFO] [1517363568.430992592]: Odom: quality=312, std dev=0.000183m|0.000317rad, update time=0.076489s
[ INFO] [1517363568.516266094]: Odom: quality=316, std dev=0.000233m|0.000254rad, update time=0.081955s
[ INFO] [1517363568.595666954]: Odom: quality=301, std dev=0.000230m|0.000285rad, update time=0.076560s
[ INFO] [1517363568.765654672]: Odom: quality=313, std dev=0.000246m|0.000193rad, update time=0.085272s
[ INFO] [1517363568.849561877]: Odom: quality=310, std dev=0.000217m|0.010000rad, update time=0.080479s
[ INFO] [1517363568.929819754]: Odom: quality=344, std dev=0.000126m|0.000243rad, update time=0.076937s
[ INFO] [1517363569.011226166]: Odom: quality=289, std dev=0.000208m|0.000295rad, update time=0.077035s
[ INFO] [1517363569.090840250]: Odom: quality=330, std dev=0.000255m|0.000152rad, update time=0.076780s
[ INFO] [1517363569.173047178]: Odom: quality=309, std dev=0.000167m|0.000224rad, update time=0.078382s
[ INFO] [1517363569.252352775]: Odom: quality=311, std dev=0.000160m|0.000269rad, update time=0.076342s
[ INFO] [1517363569.336513572]: Odom: quality=304, std dev=0.000188m|0.000319rad, update time=0.080616s
[ INFO] [1517363569.417947640]: Odom: quality=319, std dev=0.000231m|0.000288rad, update time=0.078270s
[ INFO] [1517363569.502770948]: Odom: quality=327, std dev=0.000155m|0.000244rad, update time=0.080978s
[ INFO] [1517363569.587495431]: Odom: quality=302, std dev=0.000171m|0.000262rad, update time=0.080724s
[ INFO] [1517363569.689728607]: Odom: quality=286, std dev=0.000328m|0.000591rad, update time=0.096937s
[ INFO] [1517363569.771576832]: rtabmap: Database version = "0.11.13".
[ INFO] [1517363569.777392554]: Odom: quality=287, std dev=0.000334m|0.000447rad, update time=0.084014s
[ INFO] [1517363569.817283091]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1517363569.817330862]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1517363569.817363897]: /rtabmap/rtabmap: approx_sync = false
[ INFO] [1517363569.817456576]: Setup stereo callback
[ INFO] [1517363569.851684971]:
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom,
/stereo_camera/left/image_rect_color,
/stereo_camera/right/image_rect_color,
/stereo_camera/left/camera_info,
/stereo_camera/right/camera_info
[ INFO] [1517363569.851789104]: rtabmap 0.11.13 started...
[ INFO] [1517363569.861977494]: Odom: quality=316, std dev=0.000154m|0.000134rad, update time=0.081321s
[ INFO] [1517363569.946483096]: Odom: quality=293, std dev=0.000201m|0.000355rad, update time=0.080597s
[ INFO] [1517363570.035034440]: Odom: quality=283, std dev=0.000270m|0.000221rad, update time=0.085365s
[ INFO] [1517363570.125719076]: Odom: quality=284, std dev=0.000199m|0.000310rad, update time=0.086529s
[ INFO] [1517363570.210586034]: Odom: quality=287, std dev=0.000154m|0.000313rad, update time=0.079550s
[ INFO] [1517363570.306369893]: Odom: quality=296, std dev=0.000190m|0.000116rad, update time=0.091364s
[ WARN] (2018-01-30 20:52:50.427) OdometryF2M.cpp:372::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=360) between -1 and 0"
[ INFO] [1517363570.428477554]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.116591s
[ INFO] [1517363570.533229473]: Odom: quality=291, std dev=0.000311m|0.000539rad, update time=0.101061s
[ INFO] [1517363570.647976812]: Odom: quality=264, std dev=0.000648m|0.000961rad, update time=0.109762s
[ INFO] [1517363570.669733788]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2843s, Maps update=0.0040s pub=0.0009s (local map=1, WM=1)
[ INFO] [1517363570.817480393]: Odom: quality=232, std dev=0.000524m|0.000945rad, update time=0.156380s
[ INFO] [1517363570.935225652]: Odom: quality=249, std dev=0.000335m|0.000922rad, update time=0.113568s
[ INFO] [1517363571.031878751]: Odom: quality=235, std dev=0.000370m|0.000715rad, update time=0.092904s
[ INFO] [1517363571.129546987]: Odom: quality=216, std dev=0.000442m|0.000483rad, update time=0.094625s
[ INFO] [1517363571.238259514]: Odom: quality=175, std dev=0.000384m|0.000581rad, update time=0.094851s
[ INFO] [1517363571.388019422]: Odom: quality=166, std dev=0.000840m|0.000992rad, update time=0.143628s
[ INFO] [1517363571.423607061]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1788s, Maps update=0.0022s pub=0.0004s (local map=1, WM=1)
[ INFO] [1517363571.507677624]: Odom: quality=173, std dev=0.000571m|0.000657rad, update time=0.100911s
[ INFO] [1517363571.626557658]: Odom: quality=187, std dev=0.000305m|0.000388rad, update time=0.114255s
[ INFO] [1517363571.724489404]: Odom: quality=161, std dev=0.000811m|0.000876rad, update time=0.093489s
[ INFO] [1517363571.831338016]: Odom: quality=163, std dev=0.000898m|0.001014rad, update time=0.102081s
...
I'll update ZED sdk on my computer and see if this could be the problem. EDIT Updated to CUDA 9.1 + ZED 2.3, and zed sdk doesn't recognize correctly my GPU (GT620). The "/usr/local/zed/tools/ZED Depth Viewer" tool says: "An NVidia GPU (arch. kepler or newer) is required to tun this software". It may be an installation issue of the nvidia driver on my computer. Can you use "/usr/local/zed/tools/ZED Depth Viewer" and see the 3D cloud? |
|
|
hello,
yeah i already using CUDA 9.1 + ZED 2.3 and when i used "/usr/local/zed/tools/ZED Depth Viewer" i got  and when i run these lines : $ export ROS_NAMESPACE=stereo_camera $ roslaunch zed_wrapper zed_camera.launch publish_tf:=false $ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true the output is : roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true ... logging to /home/letsgeomat/.ros/log/120796cc-066b-11e8-9b0e-548ca0efeab7/roslaunch-letsgeomat-X556UV-5063.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://letsgeomat-X556UV:43455/ SUMMARY ======== PARAMETERS * /points_xyzrgb/approx_sync: False * /points_xyzrgb/decimation: 4.0 * /points_xyzrgb/voxel_size: 0.0 * /rosdistro: kinetic * /rosversion: 1.12.12 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: False * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: odom * /rtabmap/rtabmap/map_frame_id: map * /rtabmap/rtabmap/odom_frame_id: * /rtabmap/rtabmap/odom_tf_angular_variance: 1.0 * /rtabmap/rtabmap/odom_tf_linear_variance: 1.0 * /rtabmap/rtabmap/queue_size: 30 * /rtabmap/rtabmap/subscribe_depth: False * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_stereo: True * /rtabmap/rtabmap/subscribe_user_data: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/stereo_odometry/approx_sync: False * /rtabmap/stereo_odometry/config_path: * /rtabmap/stereo_odometry/frame_id: odom * /rtabmap/stereo_odometry/odom_frame_id: odom * /rtabmap/stereo_odometry/queue_size: 30 * /rtabmap/stereo_odometry/wait_for_transform_duration: 0.2 NODES /rtabmap/ rtabmap (rtabmap_ros/rtabmap) stereo_odometry (rtabmap_ros/stereo_odometry) / points_xyzrgb (nodelet/nodelet) rviz (rviz/rviz) ROS_MASTER_URI=http://localhost:11311 process[rtabmap/stereo_odometry-1]: started with pid [5081] process[rtabmap/rtabmap-2]: started with pid [5082] process[rviz-3]: started with pid [5083] process[points_xyzrgb-4]: started with pid [5084] [ INFO] [1517391810.746668938]: Starting node... [ INFO] [1517391810.847108001]: Initializing nodelet with 4 worker threads. [ INFO] [1517391810.859456057]: Initializing nodelet with 4 worker threads. [ INFO] [1517391812.558644067]: Odometry: frame_id = odom [ INFO] [1517391812.558683140]: Odometry: odom_frame_id = odom [ INFO] [1517391812.558703964]: Odometry: publish_tf = true [ INFO] [1517391812.558722242]: Odometry: wait_for_transform = true [ INFO] [1517391812.558744050]: Odometry: wait_for_transform_duration = 0.200000 [ INFO] [1517391812.558790916]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1517391812.558808607]: Odometry: ground_truth_frame_id = [ INFO] [1517391812.558827091]: Odometry: ground_truth_base_frame_id = odom [ INFO] [1517391812.558849122]: Odometry: config_path = [ INFO] [1517391812.558865647]: Odometry: publish_null_when_lost = true [ INFO] [1517391812.558883447]: Odometry: guess_frame_id = [ INFO] [1517391812.558901523]: Odometry: guess_min_translation = 0.000000 [ INFO] [1517391812.558924915]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1517391813.014654064]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1517391813.014723384]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1517391813.014746645]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1517391813.014761510]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false [ INFO] [1517391813.014774855]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true [ INFO] [1517391813.014791675]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1517391813.014811327]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1517391813.014824418]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1517391813.019578028]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1517391813.019629781]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000 [ INFO] [1517391813.101539065]: rtabmap: frame_id = odom [ INFO] [1517391813.101695583]: rtabmap: map_frame_id = map [ INFO] [1517391813.101775472]: rtabmap: tf_delay = 0.050000 [ INFO] [1517391813.101843444]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1517391813.101903489]: rtabmap: odom_sensor_sync = false [ INFO] [1517391813.104094561]: rtabmap: stereo_to_depth = false [ INFO] [1517391813.402152415]: Update odometry parameter "Stereo/MaxDisparity"="200" from arguments [ INFO] [1517391813.402199132]: Update odometry parameter "Vis/CorFlowMaxLevel"="5" from arguments [ INFO] [1517391813.807568738]: StereoOdometry: approx_sync = false [ INFO] [1517391813.807678634]: StereoOdometry: queue_size = 30 [ INFO] [1517391813.902336325]: /rtabmap/stereo_odometry subscribed to (exact sync): /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info [ INFO] [1517391814.063368673]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1517391814.064597231]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1517391815.305264580]: Update RTAB-Map parameter "Stereo/MaxDisparity"="200" from arguments [ INFO] [1517391815.305399846]: Update RTAB-Map parameter "Vis/CorFlowMaxLevel"="5" from arguments [ INFO] [1517391816.027765395]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1517391816.050365315]: rtabmap: Deleted database "/home/letsgeomat/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1517391816.050533120]: rtabmap: Using database from "/home/letsgeomat/.ros/rtabmap.db" (0 MB). [ WARN] [1517391818.902717253]: /rtabmap/stereo_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/stereo_odometry subscribed to (exact sync): /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info [ INFO] [1517391819.568601306]: rtabmap: Database version = "0.15.0". [ INFO] [1517391819.651964742]: /rtabmap/rtabmap: queue_size = 30 [ INFO] [1517391819.652187516]: /rtabmap/rtabmap: rgbd_cameras = 1 [ INFO] [1517391819.652482937]: /rtabmap/rtabmap: approx_sync = false [ INFO] [1517391819.652789826]: Setup stereo callback [ INFO] [1517391820.147554652]: /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom, /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info [ INFO] [1517391820.297692304]: rtabmap 0.15.0 started... [ WARN] [1517391823.903056799]: /rtabmap/stereo_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/stereo_odometry subscribed to (exact sync): /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info [ WARN] [1517391825.149046279]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom, /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info [ WARN] [1517391828.903393544]: /rtabmap/stereo_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.  thank you so much for your time :) :) :) |
|
Administrator
|
Hi,
for some reasons, rtabmap.launch doesn't use stereo_camera namespace as it should by default, see here: <!-- stereo related topics --> <arg name="stereo_namespace" default="/stereo_camera"/> <arg name="left_image_topic" default="$(arg stereo_namespace)/left/image_rect_color" /> <arg name="right_image_topic" default="$(arg stereo_namespace)/right/image_rect" /> <!-- using grayscale image for efficiency --> <arg name="left_camera_info_topic" default="$(arg stereo_namespace)/left/camera_info" /> <arg name="right_camera_info_topic" default="$(arg stereo_namespace)/right/camera_info" /> You may try to explicitly set it with: roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true stereo_namespace:=/stereo_camera EDIT Instead of /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_infoIt should be /stereo_camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /stereo_camera/left/camera_info, /stereo_camera/right/camera_info cheers, Mathieu |
|
|
sorry but where i have to do this change
Instead of /camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /camera/left/camera_info, /camera/right/camera_info It should be /stereo_camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /stereo_camera/left/camera_info, /stereo_camera/right/camera_info |
|
Administrator
|
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true stereo_namespace:=/stereo_camera(stereo_namespace:=/stereo_camera is explicitly set when calling rtabmap.launch) |
|
|
helloo
i got a new error after i run this lines : $export ROS_NAMESPACE=stereo_camera $ roslaunch zed_wrapper zed_camera.launch publish_tf:=false $ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true stereo_namespace:=/stereo_camera roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true stereo_namespace:=/stereo_camera ... logging to /home/letsgeomat/.ros/log/0d066306-0760-11e8-a99a-548ca0efeab7/roslaunch-letsgeomat-X556UV-15966.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://letsgeomat-X556UV:33221/ SUMMARY ======== PARAMETERS * /points_xyzrgb/approx_sync: False * /points_xyzrgb/decimation: 4.0 * /points_xyzrgb/voxel_size: 0.0 * /rosdistro: kinetic * /rosversion: 1.12.12 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: False * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: odom * /rtabmap/rtabmap/map_frame_id: map * /rtabmap/rtabmap/odom_frame_id: * /rtabmap/rtabmap/odom_tf_angular_variance: 1.0 * /rtabmap/rtabmap/odom_tf_linear_variance: 1.0 * /rtabmap/rtabmap/queue_size: 30 * /rtabmap/rtabmap/subscribe_depth: False * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_stereo: True * /rtabmap/rtabmap/subscribe_user_data: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/stereo_odometry/approx_sync: False * /rtabmap/stereo_odometry/config_path: * /rtabmap/stereo_odometry/frame_id: odom * /rtabmap/stereo_odometry/odom_frame_id: odom * /rtabmap/stereo_odometry/queue_size: 30 * /rtabmap/stereo_odometry/wait_for_transform_duration: 0.2 NODES /rtabmap/ rtabmap (rtabmap_ros/rtabmap) stereo_odometry (rtabmap_ros/stereo_odometry) / points_xyzrgb (nodelet/nodelet) rviz (rviz/rviz) ROS_MASTER_URI=http://localhost:11311 process[rtabmap/stereo_odometry-1]: started with pid [15983] process[rtabmap/rtabmap-2]: started with pid [15984] process[rviz-3]: started with pid [15985] process[points_xyzrgb-4]: started with pid [15986] [ INFO] [1517497022.042696219]: Initializing nodelet with 4 worker threads. [ INFO] [1517497022.049622716]: Starting node... [ INFO] [1517497022.106051952]: Initializing nodelet with 4 worker threads. [ INFO] [1517497022.641716546]: Odometry: frame_id = odom [ INFO] [1517497022.641757261]: Odometry: odom_frame_id = odom [ INFO] [1517497022.641777644]: Odometry: publish_tf = true [ INFO] [1517497022.641792143]: Odometry: wait_for_transform = true [ INFO] [1517497022.641809841]: Odometry: wait_for_transform_duration = 0.200000 [ INFO] [1517497022.641850807]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1517497022.641868833]: Odometry: ground_truth_frame_id = [ INFO] [1517497022.641884099]: Odometry: ground_truth_base_frame_id = odom [ INFO] [1517497022.641899057]: Odometry: config_path = [ INFO] [1517497022.641913919]: Odometry: publish_null_when_lost = true [ INFO] [1517497022.641930376]: Odometry: guess_frame_id = [ INFO] [1517497022.641949675]: Odometry: guess_min_translation = 0.000000 [ INFO] [1517497022.641963529]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1517497022.851676450]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1517497022.851744484]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1517497022.851779391]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1517497022.851811444]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false [ INFO] [1517497022.851838816]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true [ INFO] [1517497022.851864364]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1517497022.851891626]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1517497022.851918087]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1517497022.858091716]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1517497022.858144867]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000 [ INFO] [1517497022.969729988]: rtabmap: frame_id = odom [ INFO] [1517497022.969881413]: rtabmap: map_frame_id = map [ INFO] [1517497022.969953999]: rtabmap: tf_delay = 0.050000 [ INFO] [1517497022.970026512]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1517497022.970086247]: rtabmap: odom_sensor_sync = false [ INFO] [1517497022.975950702]: rtabmap: stereo_to_depth = false [ INFO] [1517497023.967839327]: Update odometry parameter "Stereo/MaxDisparity"="200" from arguments [ INFO] [1517497023.967880772]: Update odometry parameter "Vis/CorFlowMaxLevel"="5" from arguments [ INFO] [1517497024.036798959]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1517497024.039892330]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1517497024.241693589]: StereoOdometry: approx_sync = false [ INFO] [1517497024.241731913]: StereoOdometry: queue_size = 30 [ INFO] [1517497024.325463165]: /rtabmap/stereo_odometry subscribed to (exact sync): /stereo_camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /stereo_camera/left/camera_info, /stereo_camera/right/camera_info [ WARN] [1517497024.667706838]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497024.419306) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202407 timeout was 0.2." [ WARN] [1517497024.890611701]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497024.642385) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.205352 timeout was 0.2." [ WARN] [1517497025.104995775]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497024.846402) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.201737 timeout was 0.2." [ WARN] [1517497025.326799619]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497025.086836) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202997 timeout was 0.2." [ INFO] [1517497025.486331745]: Update RTAB-Map parameter "Stereo/MaxDisparity"="200" from arguments [ INFO] [1517497025.486561470]: Update RTAB-Map parameter "Vis/CorFlowMaxLevel"="5" from arguments [ WARN] [1517497025.541451385]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497025.271142) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204404 timeout was 0.2." [ WARN] [1517497025.762799348]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497025.514359) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202769 timeout was 0.2." [ WARN] [1517497025.973680165]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497025.726826) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202407 timeout was 0.2." [ WARN] [1517497026.187212552]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497025.945454) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204918 timeout was 0.2." [ WARN] [1517497026.400785778]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497026.144975) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.205182 timeout was 0.2." [ INFO] [1517497026.456745196]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1517497026.457001837]: rtabmap: Deleted database "/home/letsgeomat/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1517497026.457062824]: rtabmap: Using database from "/home/letsgeomat/.ros/rtabmap.db" (0 MB). [ WARN] [1517497026.623714538]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497026.383443) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.203797 timeout was 0.2." [ WARN] [1517497026.846038262]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497026.610490) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204761 timeout was 0.2." [ WARN] [1517497027.059851059]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497026.809235) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.2058 timeout was 0.2." [ WARN] [1517497027.270772986]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497027.029518) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.205547 timeout was 0.2." [ WARN] [1517497027.492971032]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497027.255324) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202369 timeout was 0.2." [ WARN] [1517497027.700929851]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497027.457008) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.203245 timeout was 0.2." [ WARN] [1517497027.936475421]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497027.672841) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204826 timeout was 0.2." [ WARN] [1517497028.147574745]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497027.892466) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.203462 timeout was 0.2." [ WARN] [1517497028.368391772]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497028.093839) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204255 timeout was 0.2." [ WARN] [1517497028.572691099]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497028.331892) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.201315 timeout was 0.2." [ WARN] [1517497028.781224822]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497028.536668) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204097 timeout was 0.2." [ WARN] [1517497028.989783758]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497028.736033) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.202653 timeout was 0.2." [ WARN] [1517497029.214207299]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497028.969961) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.205271 timeout was 0.2." [ WARN] [1517497029.430207927]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497029.181408) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.201636 timeout was 0.2." [ WARN] [1517497029.638969011]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497029.390473) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.20403 timeout was 0.2." [ INFO] [1517497029.673533762]: rtabmap: Database version = "0.15.0". [ INFO] [1517497029.739582940]: /rtabmap/rtabmap: queue_size = 30 [ INFO] [1517497029.739791298]: /rtabmap/rtabmap: rgbd_cameras = 1 [ INFO] [1517497029.739884860]: /rtabmap/rtabmap: approx_sync = false [ INFO] [1517497029.740139151]: Setup stereo callback [ INFO] [1517497029.816747125]: /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom, /stereo_camera/left/image_rect_color, /stereo_camera/right/image_rect_color, /stereo_camera/left/camera_info, /stereo_camera/right/camera_info [ INFO] [1517497029.833816957]: rtabmap 0.15.0 started... [ WARN] [1517497029.859801254]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497029.607805) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.205312 timeout was 0.2." [ WARN] [1517497030.079844463]: odometry: Could not get transform from odom to zed_left_camera (stamp=1517497029.841660) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="canTransform: target_frame odom does not exist.. canTransform returned after 0.204093 timeout was 0.2." ^C[points_xyzrgb-4] killing on exit [rviz-3] killing on exit [rtabmap/rtabmap-2] killing on exit [rtabmap/stereo_odometry-1] killing on exit ^C^Crtabmap: Saving database/long-term memory... (located at /home/letsgeomat/.ros/rtabmap.db) rtabmap: Saving database/long-term memory...done! (located at /home/letsgeomat/.ros/rtabmap.db, 0 MB) shutting down processing monitor... ... shutting down processing monitor complete done |
|
Administrator
|
Hi,
Do you use a modified version of rtabmap.launch? Like the strange stereo_namespace not set to default value, the frame_id is set to "odom" as it should be set to "camera_link" by default (if you look in rtabmap.launch). Then try to set also explicitly the frame_id to "camera_link" when launching rtabmap.launch ("frame_id:=camera_link"). After that, if you have "cannot find transform between camera_link and zed_left_camera", post the tf tree here ($ rosrun tf view_frames). In latest zed ros wrapper, they may have renamed the frame in published image topics. Cheers, Mathieu |
|
|
solved
with this line i can use rtabmapvis: $export ROS_NAMESPACE=stereo_camera $roslaunch zed_wrapper zed_camera.launch publish_tf:=false $rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true for rviz these line solved my life : $export ROS_NAMESPACE=stereo_camera $roslaunch zed_wrapper zed_camera.launch publish_tf:=false $rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200 --Odom/Strategy 1 --Odom/GuessMotion true --Vis/EstimationType 1 --Vis/CorType 1 --Odom/ResetCountdown 10" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true rviz:=true rtabmapviz:=false thank you so much for replying |
|
Administrator
|
This post was updated on .
Hi,
These are the same lines you sent previously in this post and those in the tutorial. I think the problem was that roscore was still running between testing multiple rtabmap launch, and parameters from previous tests were used in the next ones. That could explain why the stereo_namespace was not set by default to stereo_camera or that frame_id was not set to its default too. cheers, Mathieu |
|
|
sorry for late i was sick last days :/
yaeh with the line in tutorial : $export ROS_NAMESPACE=stereo_camera $roslaunch zed_wrapper zed_camera.launch publish_tf:=false $rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_center 100 $roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true i can seen just in rtabmapviz but when i try with roslaunch rtabmap_ros stereo_mapping.launch stereo_namespace:="/stereo_camera" rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false to use rvis i keep get warning anyway thank you for replying me :) :) |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |