Hello
We tried implementing
Rtabmap for autonomous navigation for leo rover but we were facing some issues. We launched these files in sequence:
roslaunch leo_erc_gazebo leo_marsyard.launch
roslaunch leo_erc_viz rviz.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
roslaunch rtabmap_ros rtabmap.launch \
rgb_topic:=/zed2/left/image_rect_color \
camera_info_topic:=/zed2/left/camera_info \
depth_topic:=/zed2/depth/depth_registered \
frame_id:=base_link \
imu_topic:=/zed2/imu/data \
wait_imu_to_init:=true \
args:="-d"
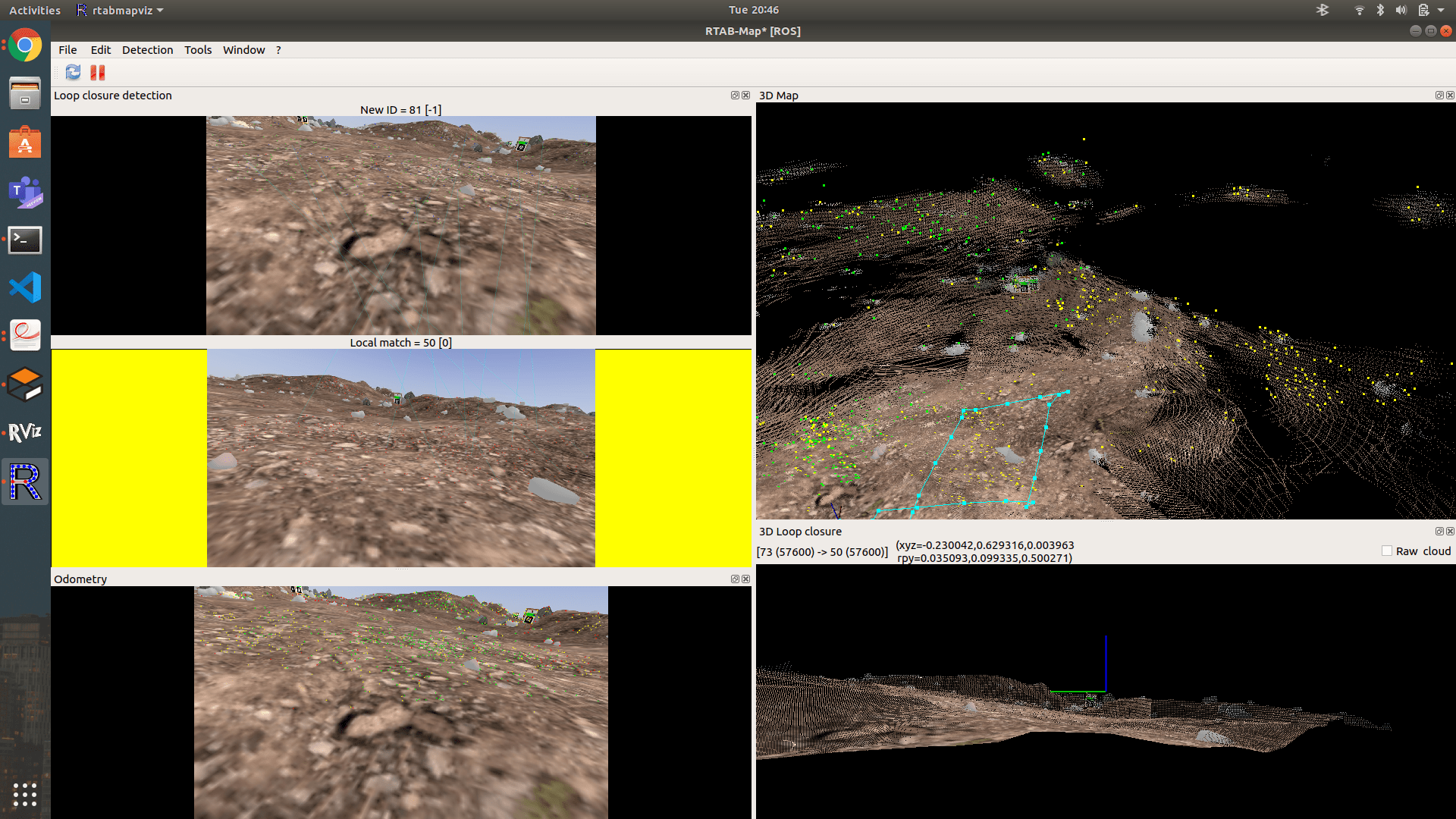
We tried for the loop closure and obtained the following:
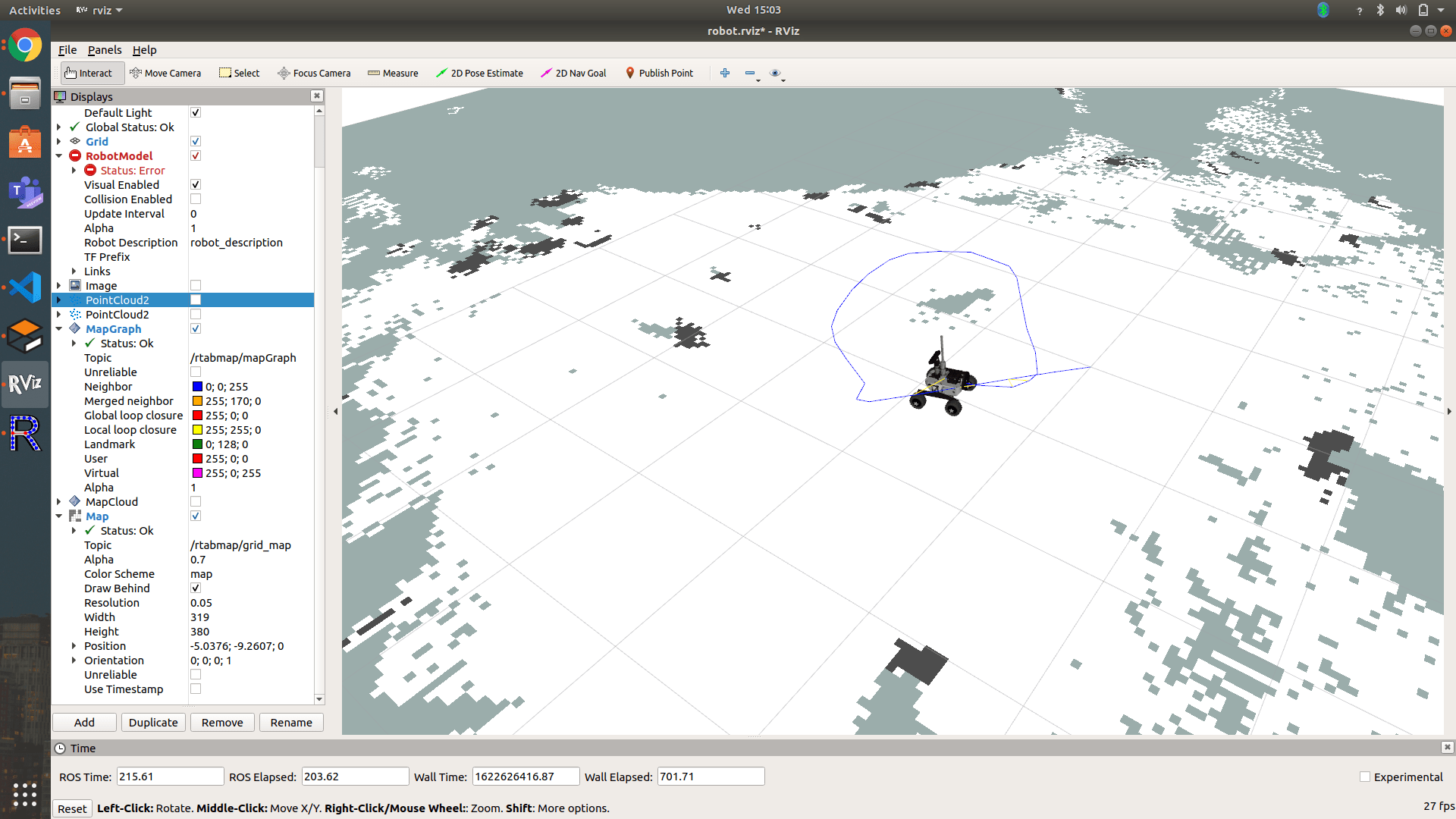 We need to implement move base for autonomously navigating the rover for which we need 2D occupancy grid which we are able to see in rviz. But we are not able to save the 2D occupancy grid and also not able to understand how to publish on /cmd_vel topic after creating the map.
We need to implement move base for autonomously navigating the rover for which we need 2D occupancy grid which we are able to see in rviz. But we are not able to save the 2D occupancy grid and also not able to understand how to publish on /cmd_vel topic after creating the map.
Please help here
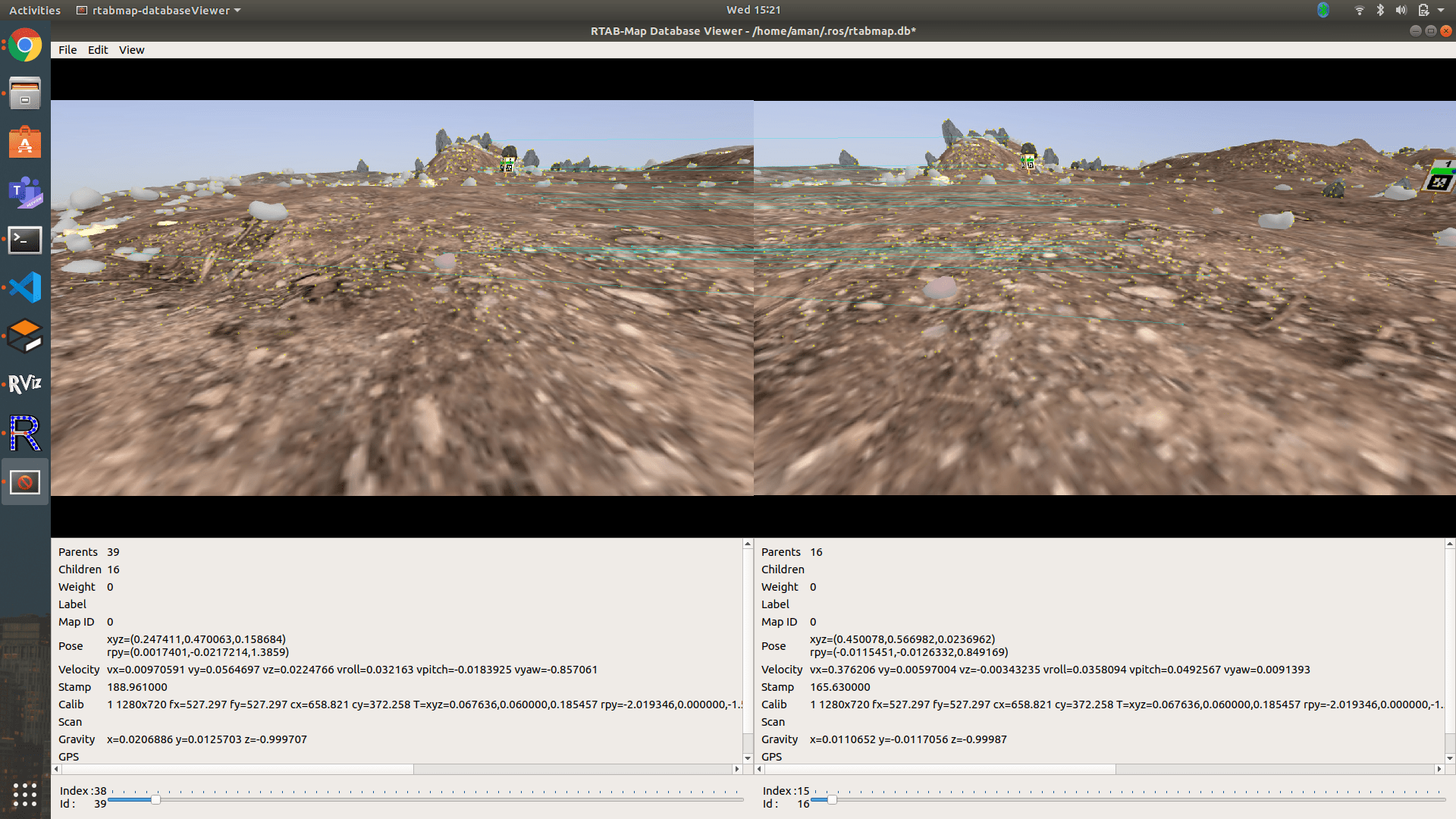
Also we are able to visualise our 3D point cloud on rtabmap data base viewer using command
rtabmap-databaseViewer ~/.ros/rtabmap.db but don't know how to use data saved on database
We found the following resource on ros wiki but we are not able to understand how to implement it on our rover.
http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
We would be highly obliged for your help.
Thanks

