Hello and Thank You Mathieu,
After some snoop into Rviz with
demo_turtlebot_mapping.launch i found topics of navigation stacks already running:
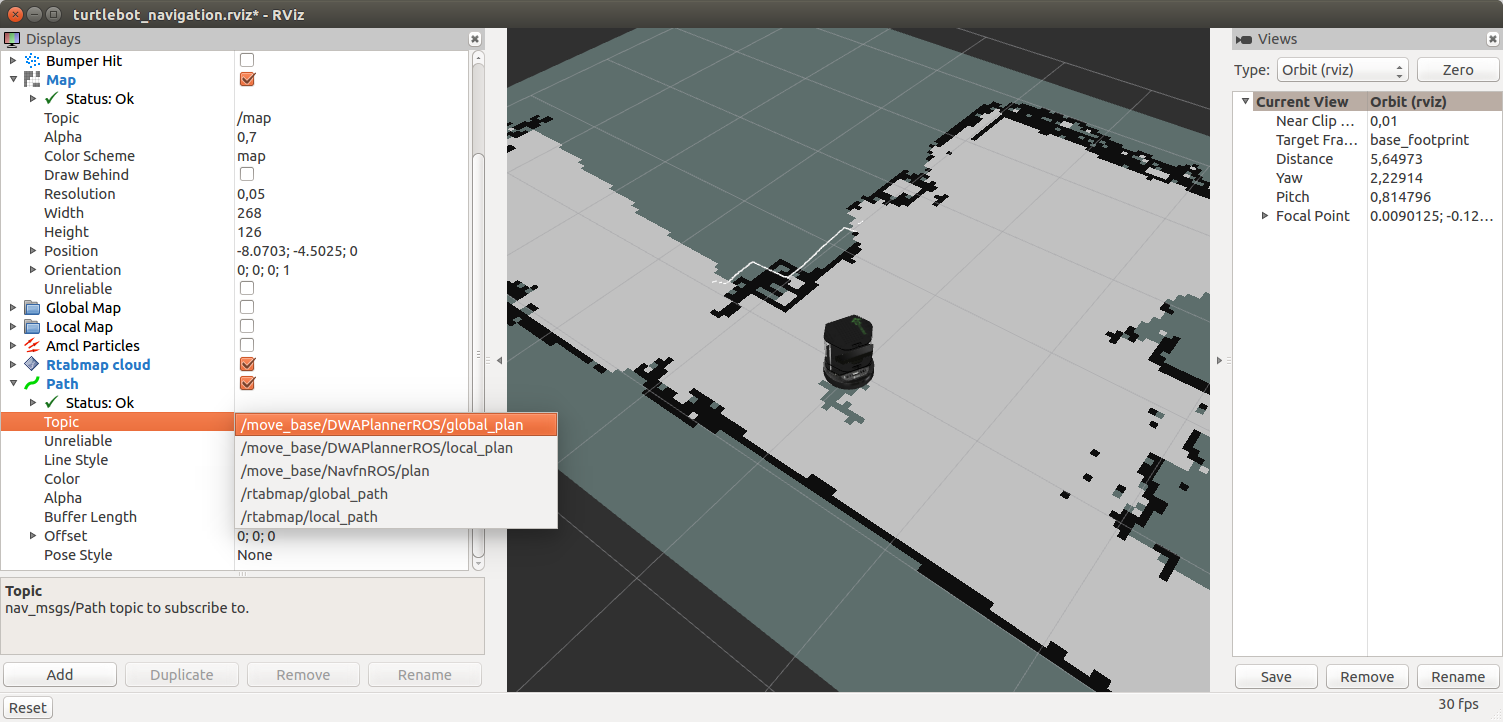
The following topics are working for what i want:
/move_base/DWAPlannerROS/global_plan
/move_base/NavfnROS/plan
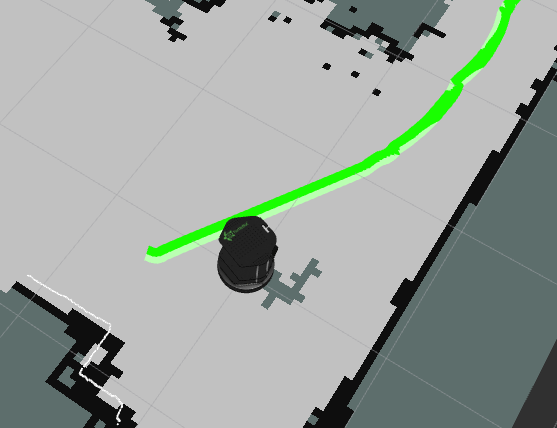
But after the nav goal is set they don't update the path for new locations, only when the visual odometry fails and i have to move the kinect around to find the last localization valid, after that the path is updated.
 I am searching into move_base and its parameters for a way to fix that. Thank you.
I am searching into move_base and its parameters for a way to fix that. Thank you.

