CATKIN_MAKE error while cloning rtabmap_ros package.

12
12

|
This is error I am getting when I am doing the following steps for cloning rtabmap_ros
Commands I gave, sudo apt update sudo apt upgrade sudo apt install ros-melodic-rtabmap-ros sudo apt install ros-melodic-rtabmap cd tk_ws (#workspace) source /opt/ros/melodic/setup.bash cd src git clone https://github.com/introlab/rtabmap_ros.git cd .. catkin_make the error is as below: CMake Error at rtabmap_ros/CMakeLists.txt:34 (find_package): Could not find a configuration file for package "RTABMap" that is compatible with requested version "0.20.9". The following configuration files were considered but not accepted: /opt/ros/melodic/lib/rtabmap-0.20/RTABMapConfig.cmake, version: 0.20.7 -- Configuring incomplete, errors occurred! See also "/home/karishma/tk_ws/build/CMakeFiles/CMakeOutput.log". See also "/home/karishma/tk_ws/build/CMakeFiles/CMakeError.log". Makefile:7418: recipe for target 'cmake_check_build_system' failed make: * [cmake_check_build_system] Error 1 Invoking "make cmake_check_build_system" failed And when I ran "roslaunch rtabmap_ros demo_robot_mapping.launch" The following is the error again, ... logging to /home/karishma/.ros/log/30889af4-7695-11eb-b188-58946b9358f8/roslaunch-karishma-HP-EliteBook-2540p-9155.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://karishma-HP-EliteBook-2540p:33423/ SUMMARY ======== PARAMETERS * /points_xyzrgb/depth/image_transport: compressedDepth * /points_xyzrgb/queue_size: 10 * /points_xyzrgb/rgb/image_transport: compressed * /points_xyzrgb/voxel_size: 0.01 * /rosdistro: melodic * /rosversion: 1.14.10 * /rtabmap/rtabmap/Grid/FromDepth: false * /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.4 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/Mem/STMSize: 30 * /rtabmap/rtabmap/RGBD/LocalRadius: 5 * /rtabmap/rtabmap/RGBD/NeighborLinkRefining: true * /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false * /rtabmap/rtabmap/RGBD/OptimizeMaxError: 3 * /rtabmap/rtabmap/RGBD/ProximityBySpace: true * /rtabmap/rtabmap/RGBD/ProximityByTime: false * /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10 * /rtabmap/rtabmap/Reg/Force3DoF: true * /rtabmap/rtabmap/Reg/Strategy: 1 * /rtabmap/rtabmap/Vis/MinInliers: 12 * /rtabmap/rtabmap/depth/image_transport: compressedDepth * /rtabmap/rtabmap/frame_id: base_footprint * /rtabmap/rtabmap/odom_frame_id: odom * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/rgb/image_transport: compressed * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_scan: True * /rtabmap/rtabmap/wait_for_transform: True * /rtabmap/rtabmapviz/depth/image_transport: compressedDepth * /rtabmap/rtabmapviz/frame_id: base_footprint * /rtabmap/rtabmapviz/rgb/image_transport: compressed * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_scan: True * /rtabmap/rtabmapviz/wait_for_transform: True * /use_sim_time: True NODES / points_xyzrgb (nodelet/nodelet) /rtabmap/ rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) auto-starting new master process[master]: started with pid [9165] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 30889af4-7695-11eb-b188-58946b9358f8 process[rosout-1]: started with pid [9176] started core service [/rosout] ERROR: cannot launch node of type [rtabmap_ros/rtabmap]: Cannot locate node of type [rtabmap] in package [rtabmap_ros]. Make sure file exists in package path and permission is set to executable (chmod +x) ERROR: cannot launch node of type [rtabmap_ros/rtabmapviz]: Cannot locate node of type [rtabmapviz] in package [rtabmap_ros]. Make sure file exists in package path and permission is set to executable (chmod +x) process[points_xyzrgb-4]: started with pid [9183] ^C[points_xyzrgb-4] killing on exit [rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done Kindly please help, Regards, Karishma |
|
Administrator
|
Hi,
The error is that your are using latest rtabmap_ros from source against rtabmap binaries. You should either use rtabmap_ros melodic-devel or build/install latest rtabmap library from source. cheers, Mathieu |
|
|
Thank you sir. I tried as you said. It worked. But there is an issue.
I am successfully able to run the command on one terminal, $ roslaunch rtabmap_ros demo_robot_mapping.launch But when I run the below command on the second terminal, $ rosbag play --clock demo_mapping.bag I get the error as "info 1614183754.782178835 : Opening demo_mapping fatal 1614183754.891050267 : Error opening file demo_mapping.bag" (image - terminal on the right side) 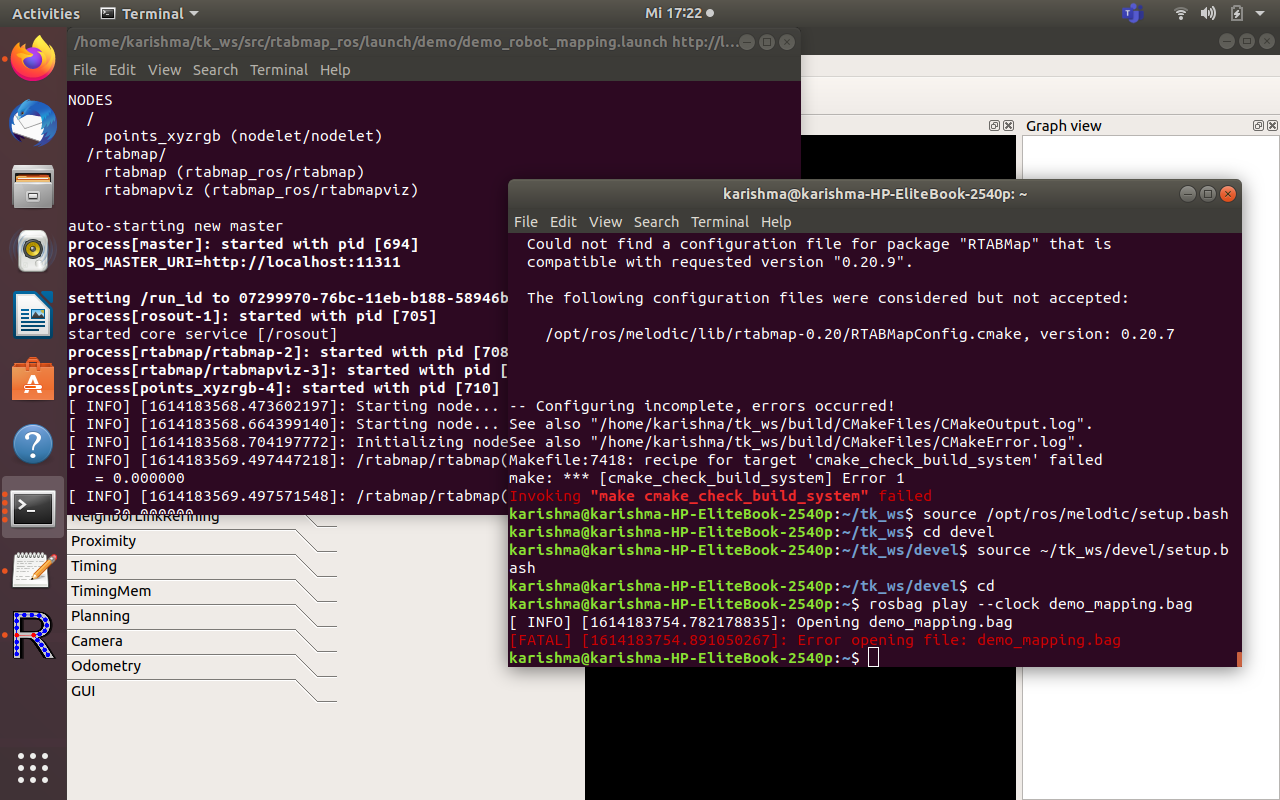 Kindly please help. Regards, Karishma |
|
Administrator
|
Does demo_mapping.bag exist? What is the size of the rosbag? Make sure it has been fully downloaded. |
|
|
Hello sir,
I have downloaded the bag file from this link, http://wiki.ros.org/rtabmap_ros which has directed me to the below link, that I have downloaded. https://docs.google.com/uc?id=0B46akLGdg-uadXhLeURiMTBQU28&export=download Is it because it should be downloaded in any specific folder, like src or devel, etc ? Best regards, Karishma Thumu. 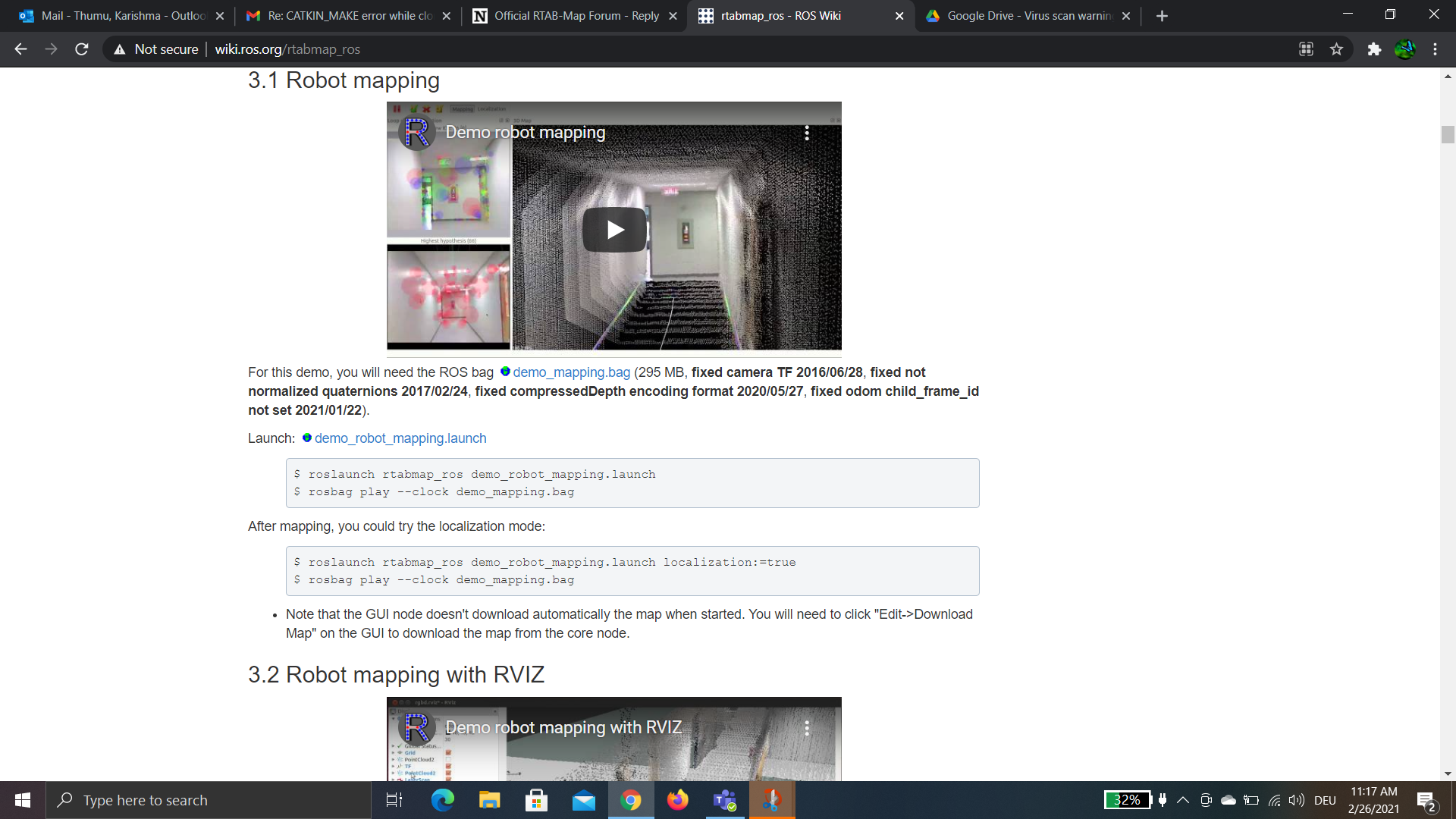
|
|
Administrator
|
There is no particular directory needed, but "rosbag play" should use the path of the bag. For example, if the bag has been downlaoded in your Downloads directory:
rosbag play --clock ~/Downloads/robot_mapping.bag // or cd ~/Downloads rosbag play --clock robot_mapping.bag |
|
|
I have tried as you said sir, but there is nothing showing on the Rtab window.
Here is the long list of warnings that have come when I ran the "rosbag play --clock demo_mapping.bag" it is in the src folder of my workspace (tk_ws/src) and "roslaunch rtabmap_ros demo_robot_mapping.launch Output: karishma@karishma-HP-EliteBook-2540p:~$ roslaunch rtabmap_ros demo_robot_mapping.launch ... logging to /home/karishma/.ros/log/f5bfe7e6-7b8b-11eb-bd34-58946b9358f8/roslaunch-karishma-HP-EliteBook-2540p-12197.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://karishma-HP-EliteBook-2540p:37119/ SUMMARY ======== PARAMETERS * /points_xyzrgb/depth/image_transport: compressedDepth * /points_xyzrgb/queue_size: 10 * /points_xyzrgb/rgb/image_transport: compressed * /points_xyzrgb/voxel_size: 0.01 * /rosdistro: melodic * /rosversion: 1.14.10 * /rtabmap/rtabmap/Grid/FromDepth: false * /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2 * /rtabmap/rtabmap/Icp/MaxCorrespondenceDistance: 0.05 * /rtabmap/rtabmap/Icp/PM: false * /rtabmap/rtabmap/Icp/PointToPlane: false * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/Mem/STMSize: 30 * /rtabmap/rtabmap/RGBD/LocalRadius: 5 * /rtabmap/rtabmap/RGBD/NeighborLinkRefining: true * /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false * /rtabmap/rtabmap/RGBD/OptimizeMaxError: 4 * /rtabmap/rtabmap/RGBD/ProximityBySpace: true * /rtabmap/rtabmap/RGBD/ProximityByTime: false * /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10 * /rtabmap/rtabmap/Reg/Force3DoF: true * /rtabmap/rtabmap/Reg/Strategy: 1 * /rtabmap/rtabmap/Vis/MinInliers: 12 * /rtabmap/rtabmap/depth/image_transport: compressedDepth * /rtabmap/rtabmap/frame_id: base_footprint * /rtabmap/rtabmap/odom_frame_id: odom * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/rgb/image_transport: compressed * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_scan: True * /rtabmap/rtabmap/wait_for_transform: True * /rtabmap/rtabmapviz/depth/image_transport: compressedDepth * /rtabmap/rtabmapviz/frame_id: base_footprint * /rtabmap/rtabmapviz/rgb/image_transport: compressed * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_scan: True * /rtabmap/rtabmapviz/wait_for_transform: True * /use_sim_time: True NODES / points_xyzrgb (nodelet/nodelet) /rtabmap/ rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) auto-starting new master process[master]: started with pid [12207] ROS_MASTER_URI=http://localhost:11311 setting /run_id to f5bfe7e6-7b8b-11eb-bd34-58946b9358f8 process[rosout-1]: started with pid [12218] started core service [/rosout] process[rtabmap/rtabmap-2]: started with pid [12225] process[rtabmap/rtabmapviz-3]: started with pid [12226] process[points_xyzrgb-4]: started with pid [12227] [ INFO] [1614712664.515420325]: Starting node... [ INFO] [1614712664.640662659]: Initializing nodelet with 4 worker threads. [ INFO] [1614712664.811678108]: Starting node... [ INFO] [1614712665.088229299]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1614712665.088306778]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1614712665.088345247]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1614712665.088385143]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1614712665.088429601]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1614712665.088465769]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1614712665.088495867]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1614712665.088532372]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1614712665.091691167]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1614712665.123707101]: rtabmap: frame_id = base_footprint [ INFO] [1614712665.123795194]: rtabmap: odom_frame_id = odom [ INFO] [1614712665.123849618]: rtabmap: map_frame_id = map [ INFO] [1614712665.123892474]: rtabmap: use_action_for_goal = false [ INFO] [1614712665.123946476]: rtabmap: tf_delay = 0.050000 [ INFO] [1614712665.123993443]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1614712665.124037732]: rtabmap: odom_sensor_sync = false [ INFO] [1614712665.124534553]: rtabmap: gen_scan = false [ INFO] [1614712665.124592356]: rtabmap: gen_depth = false [ INFO] [1614712665.185601203]: rtabmapviz: Using configuration from "/home/karishma/tk_ws/src/rtabmap_ros/launch/config/rgbd_gui.ini" [ INFO] [1614712665.274874832]: Setting RTAB-Map parameter "Grid/FromDepth"="false" [ INFO] [1614712665.343711590]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2" [ INFO] [1614712665.353192173]: Setting RTAB-Map parameter "Icp/MaxCorrespondenceDistance"="0.05" [ INFO] [1614712665.358622686]: Setting RTAB-Map parameter "Icp/PM"="false" [ INFO] [1614712665.370547175]: Setting RTAB-Map parameter "Icp/PointToPlane"="false" [ INFO] [1614712665.511558910]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1614712665.512333591]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1614712665.547307609]: Setting RTAB-Map parameter "Mem/STMSize"="30" [ INFO] [1614712665.635461625]: Setting RTAB-Map parameter "RGBD/LocalRadius"="5" [ INFO] [1614712665.652734512]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true" [ INFO] [1614712665.656248215]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false" [ INFO] [1614712665.656926464]: Setting RTAB-Map parameter "RGBD/OptimizeMaxError"="4" [ INFO] [1614712665.667806758]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true" [ INFO] [1614712665.669288262]: Setting RTAB-Map parameter "RGBD/ProximityByTime"="false" [ INFO] [1614712665.678925154]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10" [ INFO] [1614712665.686801701]: Setting RTAB-Map parameter "Reg/Force3DoF"="true" [ INFO] [1614712665.689848254]: Setting RTAB-Map parameter "Reg/Strategy"="1" [ INFO] [1614712665.857605968]: Setting RTAB-Map parameter "Vis/MinInliers"="12" [ INFO] [1614712666.131491825]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan", "subscribe_scan_cloud" or "gen_scan" is true and Grid/FromDepth is false. [ INFO] [1614712666.133588259]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1614712666.134065831]: rtabmap: Deleted database "/home/karishma/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1614712666.134146154]: rtabmap: Using database from "/home/karishma/.ros/rtabmap.db" (0 MB). libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1614712666.598325133]: Reading parameters from the ROS server... [ WARN] [1614712666.599405609]: Parameter BRIEF/Bytes not found [ WARN] [1614712666.599848337]: Parameter BRISK/Octaves not found [ WARN] [1614712666.600269661]: Parameter BRISK/PatternScale not found [ WARN] [1614712666.600729647]: Parameter BRISK/Thresh not found [ WARN] [1614712666.601186113]: Parameter Bayes/FullPredictionUpdate not found [ WARN] [1614712666.601600670]: Parameter Bayes/PredictionLC not found [ WARN] [1614712666.602082395]: Parameter Bayes/VirtualPlacePriorThr not found [ WARN] [1614712666.602609638]: Parameter Db/TargetVersion not found [ WARN] [1614712666.603145964]: Parameter DbSqlite3/CacheSize not found [ WARN] [1614712666.603666292]: Parameter DbSqlite3/InMemory not found [ WARN] [1614712666.604211743]: Parameter DbSqlite3/JournalMode not found [ WARN] [1614712666.604734249]: Parameter DbSqlite3/Synchronous not found [ WARN] [1614712666.605270867]: Parameter DbSqlite3/TempStore not found [ WARN] [1614712666.605712590]: Parameter FAST/CV not found [ WARN] [1614712666.606121667]: Parameter FAST/Gpu not found [ WARN] [1614712666.606533363]: Parameter FAST/GpuKeypointsRatio not found [ WARN] [1614712666.607069954]: Parameter FAST/GridCols not found [ WARN] [1614712666.607571514]: Parameter FAST/GridRows not found [ WARN] [1614712666.608182531]: Parameter FAST/MaxThreshold not found [ WARN] [1614712666.608732832]: Parameter FAST/MinThreshold not found [ WARN] [1614712666.609151311]: Parameter FAST/NonmaxSuppression not found [ WARN] [1614712666.609576170]: Parameter FAST/Threshold not found [ WARN] [1614712666.610080750]: Parameter FREAK/NOctaves not found [ WARN] [1614712666.610541215]: Parameter FREAK/OrientationNormalized not found [ WARN] [1614712666.610943943]: Parameter FREAK/PatternScale not found [ WARN] [1614712666.611394646]: Parameter FREAK/ScaleNormalized not found [ WARN] [1614712666.611895574]: Parameter GFTT/BlockSize not found [ WARN] [1614712666.612430481]: Parameter GFTT/K not found [ WARN] [1614712666.612950890]: Parameter GFTT/MinDistance not found [ WARN] [1614712666.613435296]: Parameter GFTT/QualityLevel not found [ WARN] [1614712666.613956622]: Parameter GFTT/UseHarrisDetector not found [ WARN] [1614712666.614476783]: Parameter GMS/ThresholdFactor not found [ WARN] [1614712666.614923861]: Parameter GMS/WithRotation not found [ WARN] [1614712666.615428271]: Parameter GMS/WithScale not found [ WARN] [1614712666.616161053]: Parameter GTSAM/Optimizer not found [ WARN] [1614712666.616696496]: Parameter Grid/3D not found [ WARN] [1614712666.617316977]: Parameter Grid/CellSize not found [ WARN] [1614712666.617807645]: Parameter Grid/ClusterRadius not found [ WARN] [1614712666.618246253]: Parameter Grid/DepthDecimation not found [ WARN] [1614712666.618707968]: Parameter Grid/DepthRoiRatios not found [ WARN] [1614712666.619099993]: Parameter Grid/FlatObstacleDetected not found [ WARN] [1614712666.619709772]: Parameter Grid/FootprintHeight not found [ WARN] [1614712666.620431449]: Parameter Grid/FootprintLength not found [ WARN] [1614712666.620923945]: Parameter Grid/FootprintWidth not found [ WARN] [1614712666.621407735]: Parameter Grid/FromDepth not found [ WARN] [1614712666.621891654]: Parameter Grid/GroundIsObstacle not found [ WARN] [1614712666.622376435]: Parameter Grid/MapFrameProjection not found [ WARN] [1614712666.622804428]: Parameter Grid/MaxGroundAngle not found [ WARN] [1614712666.623243830]: Parameter Grid/MaxGroundHeight not found [ WARN] [1614712666.623646258]: Parameter Grid/MaxObstacleHeight not found [ WARN] [1614712666.624074446]: Parameter Grid/MinClusterSize not found [ WARN] [1614712666.624562371]: Parameter Grid/MinGroundHeight not found [ WARN] [1614712666.625075728]: Parameter Grid/NoiseFilteringMinNeighbors not found [ WARN] [1614712666.625493183]: Parameter Grid/NoiseFilteringRadius not found [ WARN] [1614712666.625934128]: Parameter Grid/NormalK not found [ WARN] [1614712666.626532386]: Parameter Grid/NormalsSegmentation not found [ WARN] [1614712666.627199483]: Parameter Grid/PreVoxelFiltering not found [ WARN] [1614712666.627724979]: Parameter Grid/RangeMax not found [ WARN] [1614712666.628140876]: Parameter Grid/RangeMin not found [ WARN] [1614712666.628564325]: Parameter Grid/RayTracing not found [ WARN] [1614712666.629186711]: Parameter Grid/Scan2dUnknownSpaceFilled not found [ WARN] [1614712666.629816736]: Parameter Grid/ScanDecimation not found [ WARN] [1614712666.630446166]: Parameter GridGlobal/Eroded not found [ WARN] [1614712666.631116075]: Parameter GridGlobal/FootprintRadius not found [ WARN] [1614712666.631819821]: Parameter GridGlobal/FullUpdate not found [ WARN] [1614712666.632521258]: Parameter GridGlobal/MaxNodes not found [ WARN] [1614712666.632978901]: Parameter GridGlobal/MinSize not found [ WARN] [1614712666.633464297]: Parameter GridGlobal/OccupancyThr not found [ WARN] [1614712666.634019575]: Parameter GridGlobal/ProbClampingMax not found [ WARN] [1614712666.634528817]: Parameter GridGlobal/ProbClampingMin not found [ WARN] [1614712666.635108231]: Parameter GridGlobal/ProbHit not found [ WARN] [1614712666.635567367]: Parameter GridGlobal/ProbMiss not found [ WARN] [1614712666.636052523]: Parameter GridGlobal/UpdateError not found [ WARN] [1614712666.636633388]: Parameter Icp/CorrespondenceRatio not found [ WARN] [1614712666.637178058]: Parameter Icp/DownsamplingStep not found [ WARN] [1614712666.637696219]: Parameter Icp/Epsilon not found [ WARN] [1614712666.638190907]: Parameter Icp/Iterations not found [ WARN] [1614712666.638733083]: Parameter Icp/MaxCorrespondenceDistance not found [ WARN] [1614712666.639264435]: Parameter Icp/MaxRotation not found [ WARN] [1614712666.639799942]: Parameter Icp/MaxTranslation not found [ WARN] [1614712666.640332507]: Parameter Icp/PM not found [ WARN] [1614712666.640853988]: Parameter Icp/PMConfig not found [ WARN] [1614712666.641396785]: Parameter Icp/PMMatcherEpsilon not found [ WARN] [1614712666.641890022]: Parameter Icp/PMMatcherIntensity not found [ WARN] [1614712666.642307924]: Parameter Icp/PMMatcherKnn not found [ WARN] [1614712666.642821994]: Parameter Icp/PMOutlierRatio not found [ WARN] [1614712666.643257439]: Parameter Icp/PointToPlane not found [ WARN] [1614712666.643631263]: Parameter Icp/PointToPlaneGroundNormalsUp not found [ WARN] [1614712666.644105128]: Parameter Icp/PointToPlaneK not found [ WARN] [1614712666.644573537]: Parameter Icp/PointToPlaneLowComplexityStrategy not found [ WARN] [1614712666.644967508]: Parameter Icp/PointToPlaneMinComplexity not found [ WARN] [1614712666.645447534]: Parameter Icp/PointToPlaneRadius not found [ WARN] [1614712666.645908894]: Parameter Icp/RangeMax not found [ WARN] [1614712666.646474860]: Parameter Icp/RangeMin not found [ WARN] [1614712666.646975395]: Parameter Icp/VoxelSize not found [ WARN] [1614712666.647518302]: Parameter ImuFilter/ComplementaryBiasAlpha not found [ WARN] [1614712666.648126854]: Parameter ImuFilter/ComplementaryDoAdpativeGain not found [ WARN] [1614712666.649923750]: Parameter ImuFilter/ComplementaryDoBiasEstimation not found [ WARN] [1614712666.650564960]: Parameter ImuFilter/ComplementaryGainAcc not found [ WARN] [1614712666.651100115]: Parameter ImuFilter/MadgwickGain not found [ WARN] [1614712666.651789012]: Parameter ImuFilter/MadgwickZeta not found [ WARN] [1614712666.652380021]: Parameter KAZE/Diffusivity not found [ WARN] [1614712666.652988658]: Parameter KAZE/Extended not found [ WARN] [1614712666.653468730]: Parameter KAZE/NOctaveLayers not found [ WARN] [1614712666.653961821]: Parameter KAZE/NOctaves not found [ WARN] [1614712666.654410552]: Parameter KAZE/Threshold not found [ WARN] [1614712666.654883714]: Parameter KAZE/Upright not found [ WARN] [1614712666.655375412]: Parameter Kp/BadSignRatio not found [ WARN] [1614712666.655849792]: Parameter Kp/ByteToFloat not found [ WARN] [1614712666.656374120]: Parameter Kp/DetectorStrategy not found [ WARN] [1614712666.656939959]: Parameter Kp/DictionaryPath not found [ WARN] [1614712666.657392118]: Parameter Kp/FlannRebalancingFactor not found [ WARN] [1614712666.657785736]: Parameter Kp/GridCols not found [ WARN] [1614712666.658199133]: Parameter Kp/GridRows not found [ WARN] [1614712666.658736752]: Parameter Kp/IncrementalDictionary not found [ WARN] [1614712666.659272108]: Parameter Kp/IncrementalFlann not found [ WARN] [1614712666.659817031]: Parameter Kp/MaxDepth not found [ WARN] [1614712666.660418640]: Parameter Kp/MaxFeatures not found [ WARN] [1614712666.660811210]: Parameter Kp/MinDepth not found [ WARN] [1614712666.661215057]: Parameter Kp/NNStrategy not found [ WARN] [1614712666.661630431]: Parameter Kp/NewWordsComparedTogether not found [ WARN] [1614712666.662041859]: Parameter Kp/NndrRatio not found [ WARN] [1614712666.662449460]: Parameter Kp/Parallelized not found [ WARN] [1614712666.663030933]: Parameter Kp/RoiRatios not found [ WARN] [1614712666.663543231]: Parameter Kp/SubPixEps not found [ WARN] [1614712666.664140739]: Parameter Kp/SubPixIterations not found [ WARN] [1614712666.664664697]: Parameter Kp/SubPixWinSize not found [ WARN] [1614712666.665282754]: Parameter Kp/TfIdfLikelihoodUsed not found [ WARN] [1614712666.665844583]: Parameter Marker/CornerRefinementMethod not found [ WARN] [1614712666.666313471]: Parameter Marker/Dictionary not found [ WARN] [1614712666.666807429]: Parameter Marker/Length not found [ WARN] [1614712666.667369876]: Parameter Marker/MaxDepthError not found [ WARN] [1614712666.667888213]: Parameter Marker/MaxRange not found [ WARN] [1614712666.668453479]: Parameter Marker/MinRange not found [ WARN] [1614712666.669247053]: Parameter Marker/VarianceAngular not found [ WARN] [1614712666.670024495]: Parameter Marker/VarianceLinear not found [ WARN] [1614712666.670582777]: Parameter Mem/BadSignaturesIgnored not found [ WARN] [1614712666.671072437]: Parameter Mem/BinDataKept not found [ WARN] [1614712666.671519316]: Parameter Mem/CompressionParallelized not found [ WARN] [1614712666.672185276]: Parameter Mem/CovOffDiagIgnored not found [ WARN] [1614712666.672805901]: Parameter Mem/DepthAsMask not found [ WARN] [1614712666.673371209]: Parameter Mem/GenerateIds not found [ WARN] [1614712666.673869235]: Parameter Mem/ImageCompressionFormat not found [ WARN] [1614712666.674280627]: Parameter Mem/ImageKept not found [ WARN] [1614712666.674789737]: Parameter Mem/ImagePostDecimation not found [ WARN] [1614712666.675401927]: Parameter Mem/ImagePreDecimation not found [ WARN] [1614712666.676079793]: Parameter Mem/IncrementalMemory not found [ WARN] [1614712666.676763551]: Parameter Mem/InitWMWithAllNodes not found [ WARN] [1614712666.677427473]: Parameter Mem/IntermediateNodeDataKept not found [ WARN] [1614712666.678036560]: Parameter Mem/LaserScanDownsampleStepSize not found [ WARN] [1614712666.678624106]: Parameter Mem/LaserScanNormalK not found [ WARN] [1614712666.679176572]: Parameter Mem/LaserScanNormalRadius not found [ WARN] [1614712666.679710898]: Parameter Mem/LaserScanVoxelSize not found [ WARN] [1614712666.680227020]: Parameter Mem/LocalizationDataSaved not found [ WARN] [1614712666.680820512]: Parameter Mem/MapLabelsAdded not found [ WARN] [1614712666.681402952]: Parameter Mem/NotLinkedNodesKept not found [ WARN] [1614712666.682159568]: Parameter Mem/RawDescriptorsKept not found [ WARN] [1614712666.683312157]: Parameter Mem/RecentWmRatio not found [ WARN] [1614712666.683853022]: Parameter Mem/ReduceGraph not found [ WARN] [1614712666.684552831]: Parameter Mem/RehearsalIdUpdatedToNewOne not found [ WARN] [1614712666.685180313]: Parameter Mem/RehearsalSimilarity not found [ WARN] [1614712666.685976436]: Parameter Mem/RehearsalWeightIgnoredWhileMoving not found [ WARN] [1614712666.686923694]: Parameter Mem/STMSize not found [ WARN] [1614712666.687568171]: Parameter Mem/SaveDepth16Format not found [ WARN] [1614712666.688182884]: Parameter Mem/StereoFromMotion not found [ WARN] [1614712666.688798103]: Parameter Mem/TransferSortingByWeightId not found [ WARN] [1614712666.689299972]: Parameter Mem/UseOdomFeatures not found [ WARN] [1614712666.689691357]: Parameter Mem/UseOdomGravity not found [ WARN] [1614712666.690084103]: Parameter ORB/EdgeThreshold not found [ WARN] [1614712666.690579458]: Parameter ORB/FirstLevel not found [ WARN] [1614712666.691017002]: Parameter ORB/Gpu not found [ WARN] [1614712666.691524261]: Parameter ORB/NLevels not found [ WARN] [1614712666.692121526]: Parameter ORB/PatchSize not found [ WARN] [1614712666.692634569]: Parameter ORB/ScaleFactor not found [ WARN] [1614712666.693087510]: Parameter ORB/ScoreType not found [ WARN] [1614712666.693511549]: Parameter ORB/WTA_K not found [ WARN] [1614712666.693928611]: Parameter Optimizer/Epsilon not found [ WARN] [1614712666.694321013]: Parameter Optimizer/GravitySigma not found [ WARN] [1614712666.694844203]: Parameter Optimizer/Iterations not found [ WARN] [1614712666.695340102]: Parameter Optimizer/LandmarksIgnored not found [ WARN] [1614712666.695740465]: Parameter Optimizer/PriorsIgnored not found [ WARN] [1614712666.696192150]: Parameter Optimizer/Robust not found [ WARN] [1614712666.696704540]: Parameter Optimizer/Strategy not found [ WARN] [1614712666.697245032]: Parameter Optimizer/VarianceIgnored not found [ WARN] [1614712666.697743789]: Parameter PyMatcher/Cuda not found [ WARN] [1614712666.698282617]: Parameter PyMatcher/Iterations not found [ WARN] [1614712666.698971608]: Parameter PyMatcher/Model not found [ WARN] [1614712666.699606917]: Parameter PyMatcher/Path not found [ WARN] [1614712666.700141060]: Parameter PyMatcher/Threshold not found [ WARN] [1614712666.700666597]: Parameter RGBD/AngularSpeedUpdate not found [ WARN] [1614712666.701251642]: Parameter RGBD/AngularUpdate not found [ WARN] [1614712666.701704630]: Parameter RGBD/CreateOccupancyGrid not found [ WARN] [1614712666.702223729]: Parameter RGBD/Enabled not found [ WARN] [1614712666.702759948]: Parameter RGBD/GoalReachedRadius not found [ WARN] [1614712666.703349061]: Parameter RGBD/GoalsSavedInUserData not found [ WARN] [1614712666.703857233]: Parameter RGBD/LinearSpeedUpdate not found [ WARN] [1614712666.704413773]: Parameter RGBD/LinearUpdate not found [ WARN] [1614712666.705109176]: Parameter RGBD/LocalBundleOnLoopClosure not found [ WARN] [1614712666.705743328]: Parameter RGBD/LocalImmunizationRatio not found [ WARN] [1614712666.706354210]: Parameter RGBD/LocalRadius not found [ WARN] [1614712666.706938191]: Parameter RGBD/LoopClosureReextractFeatures not found [ WARN] [1614712666.707566899]: Parameter RGBD/LoopCovLimited not found [ WARN] [1614712666.708177066]: Parameter RGBD/MarkerDetection not found [ WARN] [1614712666.708787358]: Parameter RGBD/MaxLocalRetrieved not found [ WARN] [1614712666.709419016]: Parameter RGBD/MaxLoopClosureDistance not found [ WARN] [1614712666.710041142]: Parameter RGBD/MaxOdomCacheSize not found [ WARN] [1614712666.710550012]: Parameter RGBD/NeighborLinkRefining not found [ WARN] [1614712666.711204369]: Parameter RGBD/NewMapOdomChangeDistance not found [ WARN] [1614712666.711899605]: Parameter RGBD/OptimizeFromGraphEnd not found [ WARN] [1614712666.712741054]: Parameter RGBD/OptimizeMaxError not found [ WARN] [1614712666.713520816]: Parameter RGBD/PlanAngularVelocity not found [ WARN] [1614712666.714279871]: Parameter RGBD/PlanLinearVelocity not found [ WARN] [1614712666.715100183]: Parameter RGBD/PlanStuckIterations not found [ WARN] [1614712666.715960938]: Parameter RGBD/ProximityAngle not found [ WARN] [1614712666.716603192]: Parameter RGBD/ProximityBySpace not found [ WARN] [1614712666.717209362]: Parameter RGBD/ProximityByTime not found [ WARN] [1614712666.717810326]: Parameter RGBD/ProximityMaxGraphDepth not found [ WARN] [1614712666.718407843]: Parameter RGBD/ProximityMaxPaths not found [ WARN] [1614712666.719001738]: Parameter RGBD/ProximityOdomGuess not found [ WARN] [1614712666.719479878]: Parameter RGBD/ProximityPathFilteringRadius not found [ WARN] [1614712666.719974481]: Parameter RGBD/ProximityPathMaxNeighbors not found [ WARN] [1614712666.720368125]: Parameter RGBD/ProximityPathRawPosesUsed not found [ WARN] [1614712666.720840626]: Parameter RGBD/SavedLocalizationIgnored not found [ WARN] [1614712666.721315730]: Parameter RGBD/ScanMatchingIdsSavedInLinks not found [ WARN] [1614712666.722068768]: Parameter Reg/Force3DoF not found [ WARN] [1614712666.722779456]: Parameter Reg/RepeatOnce not found [ WARN] [1614712666.723502507]: Parameter Reg/Strategy not found [ WARN] [1614712666.724104258]: Parameter Rtabmap/ComputeRMSE not found [ WARN] [1614712666.724704519]: Parameter Rtabmap/CreateIntermediateNodes not found [ WARN] [1614712666.725311656]: Parameter Rtabmap/DetectionRate not found [ WARN] [1614712666.725935048]: Parameter Rtabmap/ImageBufferSize not found [ WARN] [1614712666.726621718]: Parameter Rtabmap/ImagesAlreadyRectified not found [ WARN] [1614712666.727300957]: Parameter Rtabmap/LoopGPS not found [ WARN] [1614712666.728006116]: Parameter Rtabmap/LoopRatio not found [ WARN] [1614712666.728671023]: Parameter Rtabmap/LoopThr not found [ WARN] [1614712666.729296888]: Parameter Rtabmap/MaxRetrieved not found [ WARN] [1614712666.729860357]: Parameter Rtabmap/MemoryThr not found [ WARN] [1614712666.730493388]: Parameter Rtabmap/PublishLastSignature not found [ WARN] [1614712666.731146111]: Parameter Rtabmap/PublishLikelihood not found [ WARN] [1614712666.731671197]: Parameter Rtabmap/PublishPdf not found [ WARN] [1614712666.732085569]: Parameter Rtabmap/PublishRAMUsage not found [ WARN] [1614712666.732532107]: Parameter Rtabmap/PublishStats not found [ WARN] [1614712666.732954104]: Parameter Rtabmap/RectifyOnlyFeatures not found [ WARN] [1614712666.733457030]: Parameter Rtabmap/SaveWMState not found [ WARN] [1614712666.733919509]: Parameter Rtabmap/StartNewMapOnGoodSignature not found [ WARN] [1614712666.734397713]: Parameter Rtabmap/StartNewMapOnLoopClosure not found [ WARN] [1614712666.735133263]: Parameter Rtabmap/StatisticLogged not found [ WARN] [1614712666.735692027]: Parameter Rtabmap/StatisticLoggedHeaders not found [ WARN] [1614712666.736257933]: Parameter Rtabmap/StatisticLogsBufferedInRAM not found [ WARN] [1614712666.736829170]: Parameter Rtabmap/TimeThr not found [ WARN] [1614712666.739138532]: Parameter SIFT/ContrastThreshold not found [ WARN] [1614712666.739778145]: Parameter SIFT/EdgeThreshold not found [ WARN] [1614712666.740462515]: Parameter SIFT/NFeatures not found [ WARN] [1614712666.741168978]: Parameter SIFT/NOctaveLayers not found [ WARN] [1614712666.741772496]: Parameter SIFT/RootSIFT not found [ WARN] [1614712666.742229039]: Parameter SIFT/Sigma not found [ WARN] [1614712666.742909604]: Parameter SURF/Extended not found [ WARN] [1614712666.743608462]: Parameter SURF/GpuKeypointsRatio not found [ WARN] [1614712666.744337892]: Parameter SURF/GpuVersion not found [ WARN] [1614712666.744827086]: Parameter SURF/HessianThreshold not found [ WARN] [1614712666.745287079]: Parameter SURF/OctaveLayers not found [ WARN] [1614712666.745862367]: Parameter SURF/Octaves not found [ WARN] [1614712666.746297877]: Parameter SURF/Upright not found [ WARN] [1614712666.746909925]: Parameter Stereo/DenseStrategy not found [ WARN] [1614712666.747473863]: Parameter Stereo/Eps not found [ WARN] [1614712666.747964184]: Parameter Stereo/Iterations not found [ WARN] [1614712666.748423488]: Parameter Stereo/MaxDisparity not found [ WARN] [1614712666.748954586]: Parameter Stereo/MaxLevel not found [ WARN] [1614712666.749471347]: Parameter Stereo/MinDisparity not found [ WARN] [1614712666.749964302]: Parameter Stereo/OpticalFlow not found [ WARN] [1614712666.751541075]: Parameter Stereo/SSD not found [ WARN] [1614712666.752242480]: Parameter Stereo/WinHeight not found [ WARN] [1614712666.753045567]: Parameter Stereo/WinWidth not found [ WARN] [1614712666.753562157]: Parameter StereoBM/BlockSize not found [ WARN] [1614712666.754129732]: Parameter StereoBM/Disp12MaxDiff not found [ WARN] [1614712666.754702556]: Parameter StereoBM/MinDisparity not found [ WARN] [1614712666.755183855]: Parameter StereoBM/NumDisparities not found [ WARN] [1614712666.755686105]: Parameter StereoBM/PreFilterCap not found [ WARN] [1614712666.756166496]: Parameter StereoBM/PreFilterSize not found [ WARN] [1614712666.756713187]: Parameter StereoBM/SpeckleRange not found [ WARN] [1614712666.757209683]: Parameter StereoBM/SpeckleWindowSize not found [ WARN] [1614712666.757775659]: Parameter StereoBM/TextureThreshold not found [ WARN] [1614712666.758272116]: Parameter StereoBM/UniquenessRatio not found [ WARN] [1614712666.758765824]: Parameter StereoSGBM/BlockSize not found [ WARN] [1614712666.759257148]: Parameter StereoSGBM/Disp12MaxDiff not found [ WARN] [1614712666.759737547]: Parameter StereoSGBM/MinDisparity not found [ WARN] [1614712666.760227368]: Parameter StereoSGBM/Mode not found [ WARN] [1614712666.760796639]: Parameter StereoSGBM/NumDisparities not found [ WARN] [1614712666.761259926]: Parameter StereoSGBM/P1 not found [ WARN] [1614712666.761738257]: Parameter StereoSGBM/P2 not found [ WARN] [1614712666.762204763]: Parameter StereoSGBM/PreFilterCap not found [ WARN] [1614712666.762704083]: Parameter StereoSGBM/SpeckleRange not found [ WARN] [1614712666.763188961]: Parameter StereoSGBM/SpeckleWindowSize not found [ WARN] [1614712666.763718986]: Parameter StereoSGBM/UniquenessRatio not found [ WARN] [1614712666.764234815]: Parameter SuperPoint/Cuda not found [ WARN] [1614712666.764754312]: Parameter SuperPoint/ModelPath not found [ WARN] [1614712666.765270724]: Parameter SuperPoint/NMS not found [ WARN] [1614712666.765755978]: Parameter SuperPoint/NMSRadius not found [ WARN] [1614712666.766222031]: Parameter SuperPoint/Threshold not found [ WARN] [1614712666.766718941]: Parameter VhEp/Enabled not found [ WARN] [1614712666.767182573]: Parameter VhEp/MatchCountMin not found [ WARN] [1614712666.767601919]: Parameter VhEp/RansacParam1 not found [ WARN] [1614712666.768022652]: Parameter VhEp/RansacParam2 not found [ WARN] [1614712666.768427234]: Parameter Vis/BundleAdjustment not found [ WARN] [1614712666.768896603]: Parameter Vis/CorFlowEps not found [ WARN] [1614712666.769465106]: Parameter Vis/CorFlowIterations not found [ WARN] [1614712666.770083376]: Parameter Vis/CorFlowMaxLevel not found [ WARN] [1614712666.770618888]: Parameter Vis/CorFlowWinSize not found [ WARN] [1614712666.771286313]: Parameter Vis/CorGuessMatchToProjection not found [ WARN] [1614712666.771818827]: Parameter Vis/CorGuessWinSize not found [ WARN] [1614712666.772253272]: Parameter Vis/CorNNDR not found [ WARN] [1614712666.772873651]: Parameter Vis/CorNNType not found [ WARN] [1614712666.773560595]: Parameter Vis/CorType not found [ WARN] [1614712666.774219411]: Parameter Vis/DepthAsMask not found [ WARN] [1614712666.774798071]: Parameter Vis/EpipolarGeometryVar not found [ WARN] [1614712666.775428408]: Parameter Vis/EstimationType not found [ WARN] [1614712666.776015571]: Parameter Vis/FeatureType not found [ WARN] [1614712666.776419380]: Parameter Vis/ForwardEstOnly not found [ WARN] [1614712666.776958526]: Parameter Vis/GridCols not found [ WARN] [1614712666.777652326]: Parameter Vis/GridRows not found [ WARN] [1614712666.778263647]: Parameter Vis/InlierDistance not found [ WARN] [1614712666.778869954]: Parameter Vis/Iterations not found [ WARN] [1614712666.779589492]: Parameter Vis/MaxDepth not found [ WARN] [1614712666.780353920]: Parameter Vis/MaxFeatures not found [ WARN] [1614712666.780982342]: Parameter Vis/MeanInliersDistance not found [ WARN] [1614712666.781811276]: Parameter Vis/MinDepth not found [ WARN] [1614712666.782441454]: Parameter Vis/MinInliers not found [ WARN] [1614712666.783120886]: Parameter Vis/MinInliersDistribution not found [ WARN] [1614712666.783771830]: Parameter Vis/PnPFlags not found [ WARN] [1614712666.784436815]: Parameter Vis/PnPRefineIterations not found [ WARN] [1614712666.786511259]: Parameter Vis/PnPReprojError not found [ WARN] [1614712666.787288755]: Parameter Vis/RefineIterations not found [ WARN] [1614712666.787775301]: Parameter Vis/RoiRatios not found [ WARN] [1614712666.788332243]: Parameter Vis/SubPixEps not found [ WARN] [1614712666.788884759]: Parameter Vis/SubPixIterations not found [ WARN] [1614712666.789450167]: Parameter Vis/SubPixWinSize not found [ WARN] [1614712666.790082024]: Parameter g2o/Baseline not found [ WARN] [1614712666.790531342]: Parameter g2o/Optimizer not found [ WARN] [1614712666.791003367]: Parameter g2o/PixelVariance not found [ WARN] [1614712666.791562949]: Parameter g2o/RobustKernelDelta not found [ WARN] [1614712666.792168845]: Parameter g2o/Solver not found [ INFO] [1614712666.792241089]: Parameters read = 0 [ INFO] [1614712669.393013899]: rtabmap: Database version = "0.20.7". [ INFO] [1614712669.452927858]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1614712669.453052475]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1614712669.453141517]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1614712669.453231289]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1614712669.453300748]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1614712669.453366120]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1614712669.453444709]: /rtabmap/rtabmap: subscribe_scan = true [ INFO] [1614712669.453514395]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1614712669.453572531]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1614712669.453639842]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1614712669.453702684]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1614712669.453865265]: Setup depth callback [ INFO] [1614712669.516314851]: /rtabmap/rtabmap subscribed to (approx sync): /data_throttled_image/compressed \ /data_throttled_image_depth/compressedDepth \ /data_throttled_camera_info \ /jn0/base_scan [ INFO] [1614712669.756795446]: rtabmap 0.20.9 started... [ INFO] [1614712670.092785781]: /rtabmap/rtabmapviz: subscribe_depth = true [ INFO] [1614712670.092893747]: /rtabmap/rtabmapviz: subscribe_rgb = false [ INFO] [1614712670.092951039]: /rtabmap/rtabmapviz: subscribe_stereo = false [ INFO] [1614712670.092987811]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1614712670.093017141]: /rtabmap/rtabmapviz: subscribe_odom_info = false [ INFO] [1614712670.093051723]: /rtabmap/rtabmapviz: subscribe_user_data = false [ INFO] [1614712670.093100928]: /rtabmap/rtabmapviz: subscribe_scan = true [ INFO] [1614712670.093138484]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false [ INFO] [1614712670.093173085]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false [ INFO] [1614712670.093213535]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1614712670.093264861]: /rtabmap/rtabmapviz: approx_sync = true [ INFO] [1614712670.093311845]: Setup depth callback [ INFO] [1614712670.229332184]: /rtabmap/rtabmapviz subscribed to (approx sync): /az3/base_controller/odom \ /data_throttled_image/compressed \ /data_throttled_image_depth/compressedDepth \ /data_throttled_camera_info \ /jn0/base_scan [ INFO] [1614712670.229545472]: rtabmapviz started. How shall I fix this, sir. Karishma 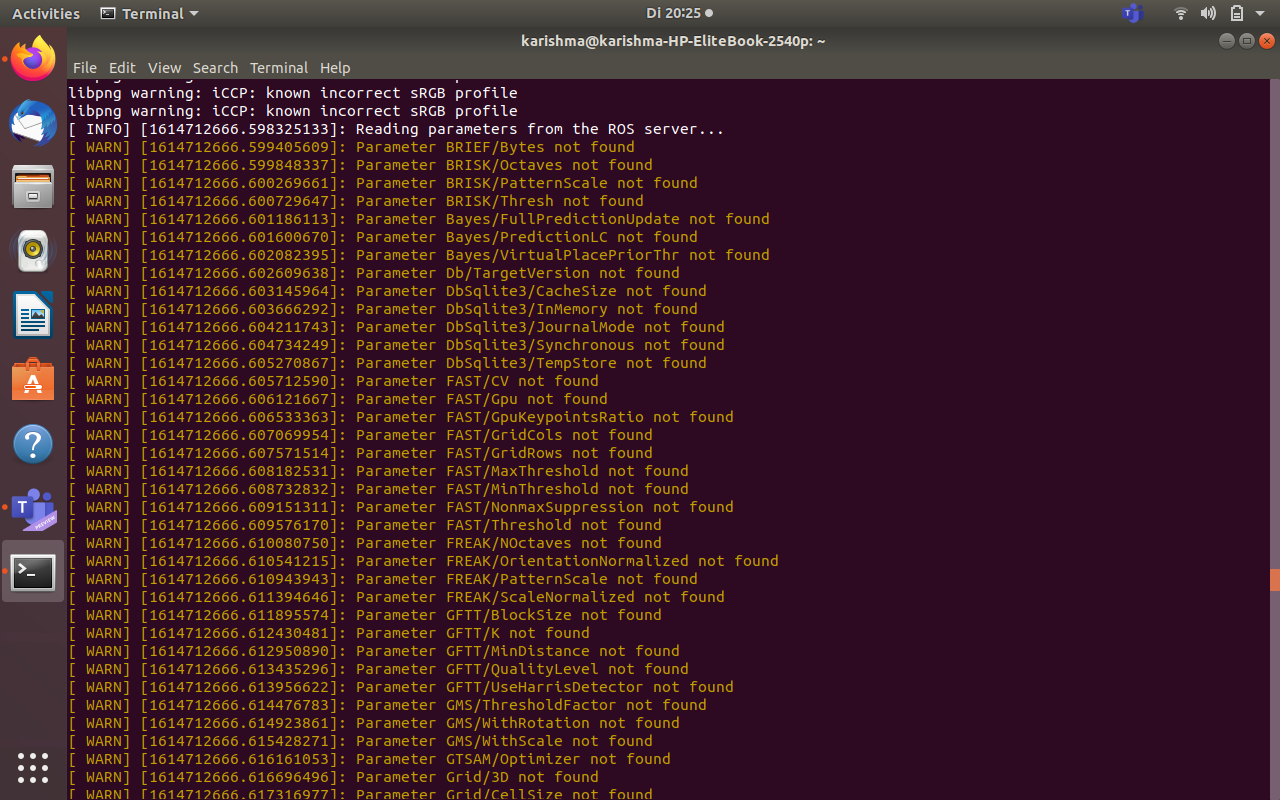 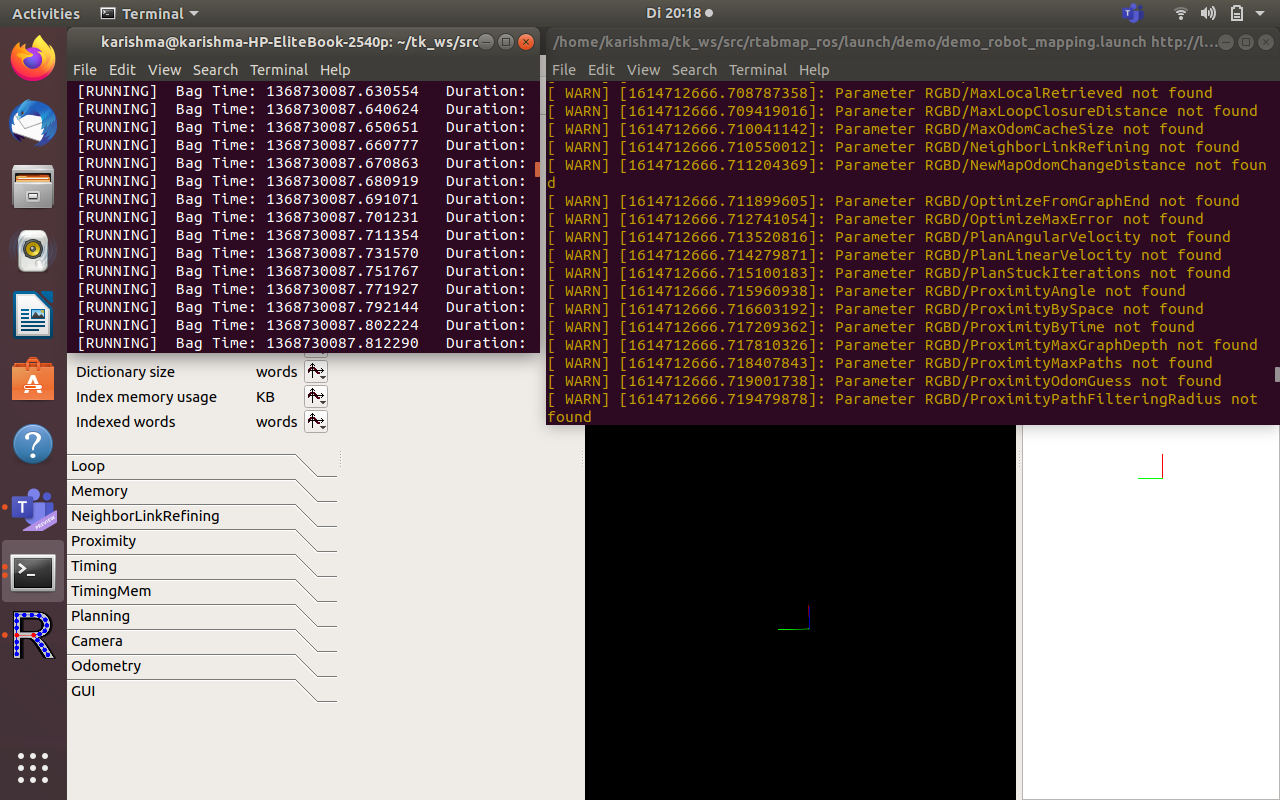 |
|
Administrator
|
Hi,
You can ignore those "parameters not found" warnings on startup. It means the rtabmapviz node has been launched before rtabmap is started. I did updated the code to avoid this on startup. Then when you play the bag, what is the output? |
|
|
Hai Sir,
I don't exactly know what kind of output to expect. As I ran the bag file, (the terminal on the left), the second image, is all that is being displayed on the monitor. |
|
Administrator
|
After doing:
roslaunch rtabmap_ros demo_robot_mapping.launch rosbag play --clock demo_mapping.bag In rtabmap_ros terminal:
roslaunch rtabmap_ros demo_robot_mapping.launch
... logging to /home/mathieu/.ros/log/e9f47176-7b9e-11eb-9340-907841228e31/roslaunch-mathieu-XPS-15-7590-22642.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://mathieu-XPS-15-7590:45373/
SUMMARY
========
PARAMETERS
* /points_xyzrgb/depth/image_transport: compressedDepth
* /points_xyzrgb/queue_size: 10
* /points_xyzrgb/rgb/image_transport: compressed
* /points_xyzrgb/voxel_size: 0.01
* /rosdistro: melodic
* /rosversion: 1.14.10
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2
* /rtabmap/rtabmap/Icp/MaxCorrespondenceDistance: 0.05
* /rtabmap/rtabmap/Icp/PM: false
* /rtabmap/rtabmap/Icp/PointToPlane: false
* /rtabmap/rtabmap/Icp/VoxelSize: 0.05
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/Mem/STMSize: 30
* /rtabmap/rtabmap/RGBD/LocalRadius: 5
* /rtabmap/rtabmap/RGBD/NeighborLinkRefining: true
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false
* /rtabmap/rtabmap/RGBD/OptimizeMaxError: 4
* /rtabmap/rtabmap/RGBD/ProximityBySpace: true
* /rtabmap/rtabmap/RGBD/ProximityByTime: false
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Vis/MinInliers: 12
* /rtabmap/rtabmap/depth/image_transport: compressedDepth
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/odom_frame_id: odom
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/rgb/image_transport: compressed
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmap/wait_for_transform: True
* /rtabmap/rtabmapviz/depth/image_transport: compressedDepth
* /rtabmap/rtabmapviz/frame_id: base_footprint
* /rtabmap/rtabmapviz/rgb/image_transport: compressed
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_scan: True
* /rtabmap/rtabmapviz/wait_for_transform: True
* /use_sim_time: True
NODES
/
points_xyzrgb (nodelet/nodelet)
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
auto-starting new master
process[master]: started with pid [22652]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to e9f47176-7b9e-11eb-9340-907841228e31
process[rosout-1]: started with pid [22663]
started core service [/rosout]
process[rtabmap/rtabmap-2]: started with pid [22670]
process[rtabmap/rtabmapviz-3]: started with pid [22671]
process[points_xyzrgb-4]: started with pid [22672]
[ INFO] [1614720803.855337075]: Starting node...
[ INFO] [1614720803.929733306]: Initializing nodelet with 12 worker threads.
[ INFO] [1614720804.029952700]: Starting node...
[ INFO] [1614720804.188467838]: rtabmapviz: Using configuration from "/home/mathieu/catkin_ws/src/rtabmap_ros/launch/config/rgbd_gui.ini"
[ INFO] [1614720804.208266987]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1614720804.208292426]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1614720804.208301079]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1614720804.208316372]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1614720804.208330672]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1614720804.208338057]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1614720804.208344756]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1614720804.208354048]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1614720804.209627984]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1614720804.224220782]: rtabmap: frame_id = base_footprint
[ INFO] [1614720804.224244495]: rtabmap: odom_frame_id = odom
[ INFO] [1614720804.224259352]: rtabmap: map_frame_id = map
[ INFO] [1614720804.224271352]: rtabmap: use_action_for_goal = false
[ INFO] [1614720804.224287302]: rtabmap: tf_delay = 0.050000
[ INFO] [1614720804.224299099]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1614720804.224313027]: rtabmap: odom_sensor_sync = false
[ INFO] [1614720804.224533799]: rtabmap: gen_scan = false
[ INFO] [1614720804.224550399]: rtabmap: gen_depth = false
[ INFO] [1614720804.274896146]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1614720804.295708333]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1614720804.298111307]: Setting RTAB-Map parameter "Icp/MaxCorrespondenceDistance"="0.05"
[ INFO] [1614720804.299872404]: Setting RTAB-Map parameter "Icp/PM"="false"
[ INFO] [1614720804.304432435]: Setting RTAB-Map parameter "Icp/PointToPlane"="false"
[ INFO] [1614720804.309930261]: Setting RTAB-Map parameter "Icp/VoxelSize"="0.05"
[ INFO] [1614720804.349408259]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1614720804.349724984]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1614720804.361221631]: Setting RTAB-Map parameter "Mem/STMSize"="30"
[ INFO] [1614720804.392843613]: Setting RTAB-Map parameter "RGBD/LocalRadius"="5"
[ INFO] [1614720804.397646173]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true"
[ INFO] [1614720804.398801623]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false"
[ INFO] [1614720804.399025419]: Setting RTAB-Map parameter "RGBD/OptimizeMaxError"="4"
[ INFO] [1614720804.402189526]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1614720804.402450034]: Setting RTAB-Map parameter "RGBD/ProximityByTime"="false"
[ INFO] [1614720804.406308643]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10"
[ INFO] [1614720804.408913503]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1614720804.409940969]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1614720804.486434080]: Setting RTAB-Map parameter "Vis/MinInliers"="12"
[ INFO] [1614720804.626245031]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan", "subscribe_scan_cloud" or "gen_scan" is true and Grid/FromDepth is false.
[ INFO] [1614720804.627332712]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1614720804.627508945]: rtabmap: Deleted database "/home/mathieu/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1614720804.627539836]: rtabmap: Using database from "/home/mathieu/.ros/rtabmap.db" (0 MB).
[ INFO] [1614720804.791864987]: rtabmap: Database version = "0.20.9".
[ INFO] [1614720804.814522513]: /rtabmap/rtabmap: subscribe_depth = true
[ INFO] [1614720804.814551231]: /rtabmap/rtabmap: subscribe_rgb = true
[ INFO] [1614720804.814564935]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1614720804.814587654]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1614720804.814612088]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1614720804.814637021]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1614720804.814662079]: /rtabmap/rtabmap: subscribe_scan = true
[ INFO] [1614720804.814688855]: /rtabmap/rtabmap: subscribe_scan_cloud = false
[ INFO] [1614720804.814711388]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1614720804.814734299]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1614720804.814756597]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1614720804.814801405]: Setup depth callback
[ INFO] [1614720804.849849994]:
/rtabmap/rtabmap subscribed to (approx sync):
/data_throttled_image/compressed \
/data_throttled_image_depth/compressedDepth \
/data_throttled_camera_info \
/jn0/base_scan
[ INFO] [1614720804.964869469]: rtabmap 0.20.9 started...
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1614720805.165959329]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1614720805.280249255]: rtabmapviz: Parameters read = 345
[ INFO] [1614720805.280275792]: rtabmapviz: Parameters successfully read.
[ INFO] [1614720805.550032270]: /rtabmap/rtabmapviz: subscribe_depth = true
[ INFO] [1614720805.550058907]: /rtabmap/rtabmapviz: subscribe_rgb = false
[ INFO] [1614720805.550068858]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1614720805.550077442]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1614720805.550088366]: /rtabmap/rtabmapviz: subscribe_odom_info = false
[ INFO] [1614720805.550096459]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1614720805.550107240]: /rtabmap/rtabmapviz: subscribe_scan = true
[ INFO] [1614720805.550123295]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false
[ INFO] [1614720805.550139249]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1614720805.550155070]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1614720805.550171518]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1614720805.550186566]: Setup depth callback
[ INFO] [1614720805.610630897]:
/rtabmap/rtabmapviz subscribed to (approx sync):
/az3/base_controller/odom \
/data_throttled_image/compressed \
/data_throttled_image_depth/compressedDepth \
/data_throttled_camera_info \
/jn0/base_scan
[ INFO] [1614720805.610748730]: rtabmapviz started.
[ WARN] [1614720808.429574312, 1368730003.783124037]: Could not get transform from base_footprint to /openni_rgb_optical_frame after 0.200000 seconds (for stamp=1368730003.413204)! Error="Lookup would require extrapolation into the past. Requested time 1368730003.413204402 but the earliest data is at time 1368730003.500895582, when looking up transform from frame [openni_rgb_optical_frame] to frame [base_footprint]. canTransform returned after 0.201196 timeout was 0.2.".
[ERROR] [1614720808.429626056, 1368730003.783124037]: TF of received image 0 at time 1368730003.413204s is not set!
[ERROR] [1614720808.429709009, 1368730003.783124037]: Could not convert rgb/depth msgs! Aborting rtabmap update...
[ WARN] [1614720808.560954050, 1368730003.913901791]: Could not get transform from base_footprint to /openni_rgb_optical_frame after 0.200000 seconds (for stamp=1368730003.413204)! Error="Lookup would require extrapolation into the past. Requested time 1368730003.413204402 but the earliest data is at time 1368730003.500895582, when looking up transform from frame [openni_rgb_optical_frame] to frame [base_footprint]. canTransform returned after 0.2012 timeout was 0.2.".
[ERROR] [1614720808.561005005, 1368730003.913901791]: TF of received image 0 at time 1368730003.413204s is not set!
[ERROR] [1614720808.561021894, 1368730003.913901791]: Could not convert rgb/depth msgs! Aborting rtabmapviz update...
[ WARN] [1614720808.761849206, 1368730004.115086046]: Could not get transform from base_footprint to /openni_rgb_optical_frame after 0.200000 seconds (for stamp=1368730003.513340)! Error="Lookup would require extrapolation into the past. Requested time 1368730003.513339798 but the earliest data is at time 1368730003.865693820, when looking up transform from frame [openni_rgb_optical_frame] to frame [base_footprint]. canTransform returned after 0.201184 timeout was 0.2.".
[ERROR] [1614720808.761881314, 1368730004.115086046]: TF of received image 0 at time 1368730003.513340s is not set!
[ERROR] [1614720808.761897454, 1368730004.115086046]: Could not convert rgb/depth msgs! Aborting rtabmapviz update...
[ WARN] [1614720808.982784331, 1368730004.336516965]: Could not get transform from base_footprint to base_laser_link after 0.200000 seconds (for stamp=1368730003.833999)! Error="Lookup would require extrapolation into the past. Requested time 1368730003.833998750 but the earliest data is at time 1368730003.865693820, when looking up transform from frame [base_laser_link] to frame [base_footprint]. canTransform returned after 0.201304 timeout was 0.2.".
[ERROR] [1614720808.982816605, 1368730004.336516965]: Could not convert laser scan msg! Aborting rtabmapviz update...
[ INFO] [1614720809.478617886, 1368730004.829375281]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0019s, RTAB-Map=0.1484s, Maps update=0.0082s pub=0.0003s (local map=1, WM=1)
[ INFO] [1614720810.459426678, 1368730005.804951104]: rtabmap (2): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0396s, Maps update=0.0018s pub=0.0000s (local map=1, WM=1)
[ INFO] [1614720811.490445131, 1368730006.836948682]: rtabmap (3): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0436s, Maps update=0.0008s pub=0.0000s (local map=2, WM=2)
[ INFO] [1614720812.572984393, 1368730007.925738257]: rtabmap (4): Rate=1.00s, Limit=0.000s, Conversion=0.0005s, RTAB-Map=0.0436s, Maps update=0.0009s pub=0.0000s (local map=3, WM=3)
[ INFO] [1614720813.675074820, 1368730009.023412353]: rtabmap (5): Rate=1.00s, Limit=0.000s, Conversion=0.0010s, RTAB-Map=0.0574s, Maps update=0.0011s pub=0.0000s (local map=4, WM=4)
[ INFO] [1614720814.729065414, 1368730010.074054693]: rtabmap (6): Rate=1.00s, Limit=0.000s, Conversion=0.0007s, RTAB-Map=0.0503s, Maps update=0.0010s pub=0.0000s (local map=5, WM=5)
[ INFO] [1614720815.779073677, 1368730011.130782802]: rtabmap (7): Rate=1.00s, Limit=0.000s, Conversion=0.0007s, RTAB-Map=0.0450s, Maps update=0.0012s pub=0.0000s (local map=6, WM=6)
[ INFO] [1614720816.896034808, 1368730012.244396188]: rtabmap (8): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0389s, Maps update=0.0010s pub=0.0000s (local map=7, WM=7)
[ INFO] [1614720817.840258812, 1368730013.191916616]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1614720817.915143208, 1368730013.262402395]: rtabmap (9): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0354s, Maps update=0.0009s pub=0.0000s (local map=7, WM=7)
[ INFO] [1614720817.955451186, 1368730013.302712181]: rtabmapviz: Parameters read = 345
[ INFO] [1614720817.955475092, 1368730013.302712181]: rtabmapviz: Parameters successfully read.
[ INFO] [1614720819.069397708, 1368730014.422522760]: rtabmap (10): Rate=1.00s, Limit=0.000s, Conversion=0.0005s, RTAB-Map=0.0437s, Maps update=0.0009s pub=0.0000s (local map=8, WM=8)
[ INFO] [1614720820.169084181, 1368730015.516230252]: rtabmap (11): Rate=1.00s, Limit=0.000s, Conversion=0.0008s, RTAB-Map=0.0530s, Maps update=0.0013s pub=0.0000s (local map=9, WM=9)
[ INFO] [1614720821.263931767, 1368730016.615383163]: rtabmap (12): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0376s, Maps update=0.0007s pub=0.0000s (local map=10, WM=10)
[ INFO] [1614720822.290834887, 1368730017.643639703]: rtabmap (13): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0429s, Maps update=0.0018s pub=0.0000s (local map=11, WM=11)
[ INFO] [1614720823.321760865, 1368730018.671890757]: rtabmap (14): Rate=1.00s, Limit=0.000s, Conversion=0.0011s, RTAB-Map=0.0539s, Maps update=0.0015s pub=0.0000s (local map=12, WM=12)
[ INFO] [1614720824.441745208, 1368730019.791170648]: rtabmap (15): Rate=1.00s, Limit=0.000s, Conversion=0.0005s, RTAB-Map=0.0612s, Maps update=0.0018s pub=0.0000s (local map=13, WM=13)
[ INFO] [1614720825.420253122, 1368730020.765956616]: rtabmap (16): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0398s, Maps update=0.0021s pub=0.0000s (local map=14, WM=14)
[ INFO] [1614720826.672163733, 1368730022.018598428]: rtabmap (17): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0535s, Maps update=0.0018s pub=0.0000s (local map=15, WM=15)
[ INFO] [1614720827.719752000, 1368730023.069735563]: rtabmap (18): Rate=1.00s, Limit=0.000s, Conversion=0.0012s, RTAB-Map=0.0800s, Maps update=0.0018s pub=0.0000s (local map=16, WM=16)
[ INFO] [1614720828.823403650, 1368730024.171124727]: rtabmap (19): Rate=1.00s, Limit=0.000s, Conversion=0.0008s, RTAB-Map=0.0629s, Maps update=0.0018s pub=0.0000s (local map=17, WM=17)
[ INFO] [1614720829.945154105, 1368730025.297659147]: rtabmap (20): Rate=1.00s, Limit=0.000s, Conversion=0.0009s, RTAB-Map=0.0707s, Maps update=0.0021s pub=0.0000s (local map=18, WM=18)
[ INFO] [1614720831.033350219, 1368730026.386841018]: rtabmap (21): Rate=1.00s, Limit=0.000s, Conversion=0.0009s, RTAB-Map=0.0650s, Maps update=0.0017s pub=0.0000s (local map=19, WM=19)
[ INFO] [1614720832.036232331, 1368730027.387251927]: rtabmap (22): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0417s, Maps update=0.0016s pub=0.0000s (local map=19, WM=19)
[ INFO] [1614720833.250375190, 1368730028.594945948]: rtabmap (23): Rate=1.00s, Limit=0.000s, Conversion=0.0008s, RTAB-Map=0.0531s, Maps update=0.0017s pub=0.0000s (local map=20, WM=20)
[ INFO] [1614720834.247915520, 1368730029.593160791]: rtabmap (24): Rate=1.00s, Limit=0.000s, Conversion=0.0013s, RTAB-Map=0.0691s, Maps update=0.0015s pub=0.0000s (local map=21, WM=21)
[ INFO] [1614720835.385463437, 1368730030.738000187]: rtabmap (25): Rate=1.00s, Limit=0.000s, Conversion=0.0012s, RTAB-Map=0.1165s, Maps update=0.0016s pub=0.0000s (local map=22, WM=22)
[ INFO] [1614720836.480565817, 1368730031.829241889]: rtabmap (26): Rate=1.00s, Limit=0.000s, Conversion=0.0006s, RTAB-Map=0.0427s, Maps update=0.0007s pub=0.0000s (local map=23, WM=23)
[ INFO] [1614720837.638002146, 1368730032.982798078]: rtabmap (27): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0376s, Maps update=0.0008s pub=0.0000s (local map=24, WM=24)
[ INFO] [1614720838.714962718, 1368730034.066907853]: rtabmap (28): Rate=1.00s, Limit=0.000s, Conversion=0.0013s, RTAB-Map=0.0448s, Maps update=0.0006s pub=0.0000s (local map=24, WM=24)
[ INFO] [1614720839.845124847, 1368730035.191653687]: rtabmap (29): Rate=1.00s, Limit=0.000s, Conversion=0.0009s, RTAB-Map=0.0531s, Maps update=0.0007s pub=0.0000s (local map=25, WM=25)
[ INFO] [1614720840.880400225, 1368730036.232986732]: rtabmap (30): Rate=1.00s, Limit=0.000s, Conversion=0.0008s, RTAB-Map=0.0404s, Maps update=0.0008s pub=0.0000s (local map=26, WM=26)
[ INFO] [1614720841.981332891, 1368730037.333905984]: rtabmap (31): Rate=1.00s, Limit=0.000s, Conversion=0.0013s, RTAB-Map=0.0634s, Maps update=0.0009s pub=0.0000s (local map=27, WM=27)
[ INFO] [1614720843.005780385, 1368730038.355225510]: rtabmap (32): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0424s, Maps update=0.0008s pub=0.0000s (local map=28, WM=28)
in rtabmapviz:
|
|
|
I did runt the same two commands sir.
roslaunch rtabmap_ros demo_robot_mapping.launch rosbag play --clock demo_mapping.bag But I don't know, the RtabmapViz is just plain. Should I make any changes in there. 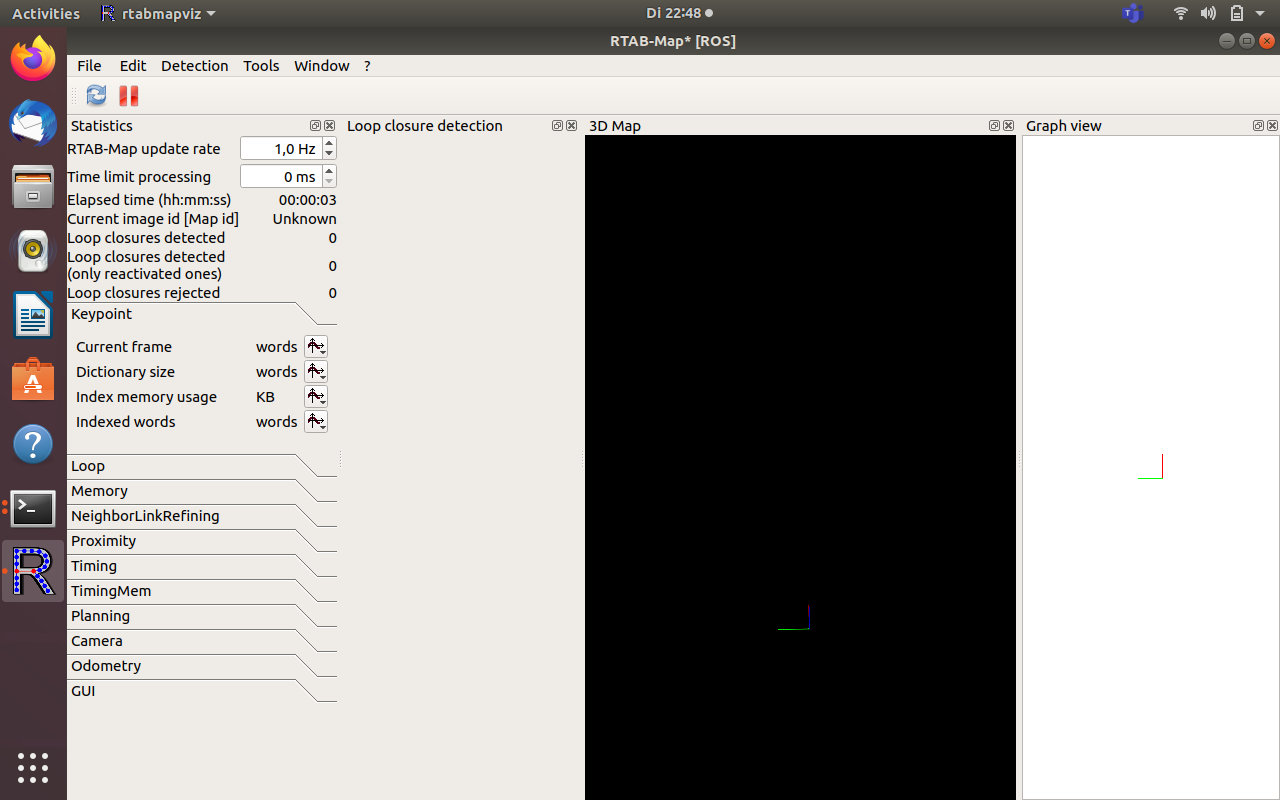
|
|
|
Hai Sir,
The last line in the rtabmap_ros terminal is that "[ INFO] [1614723270.625090158]: rtabmapviz started." From then it is like, no response seen on the terminal and the RtabmapViz. Here is the picture of it. Please have a look. 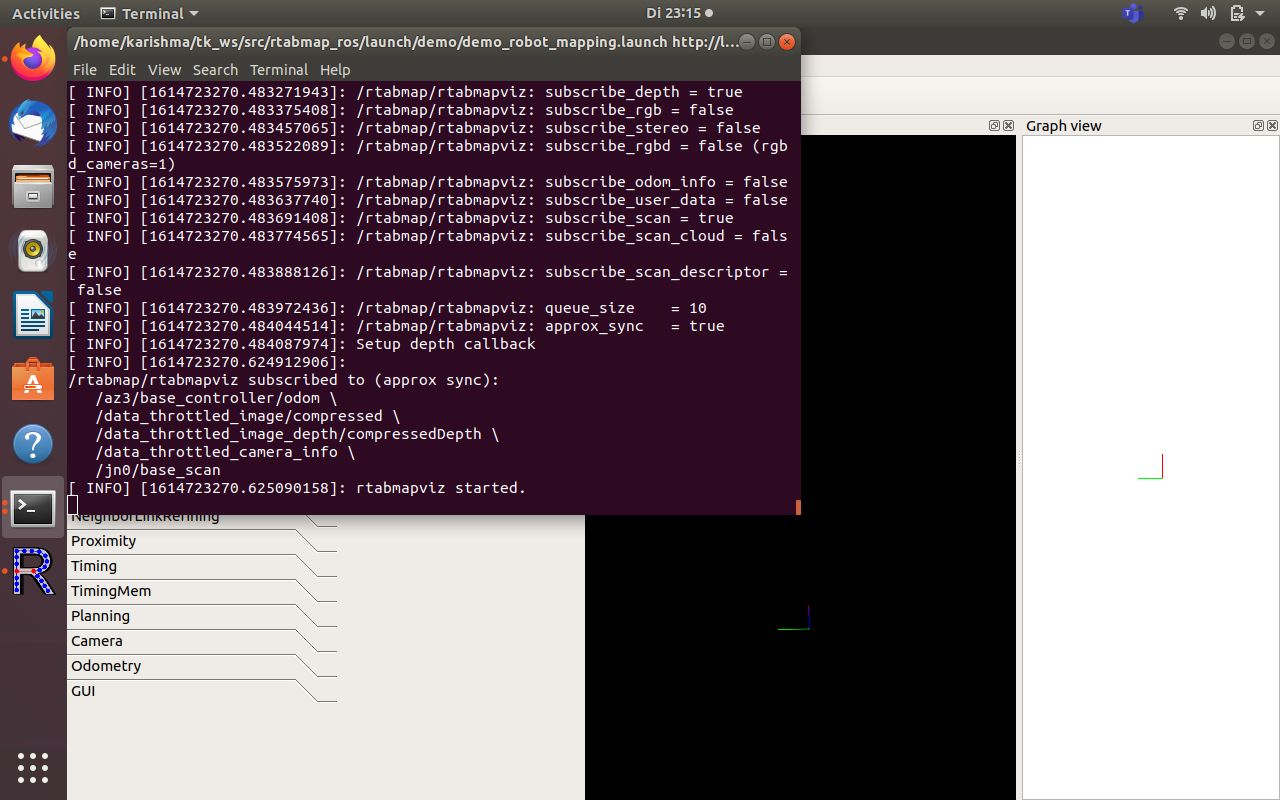 |
|
Administrator
|
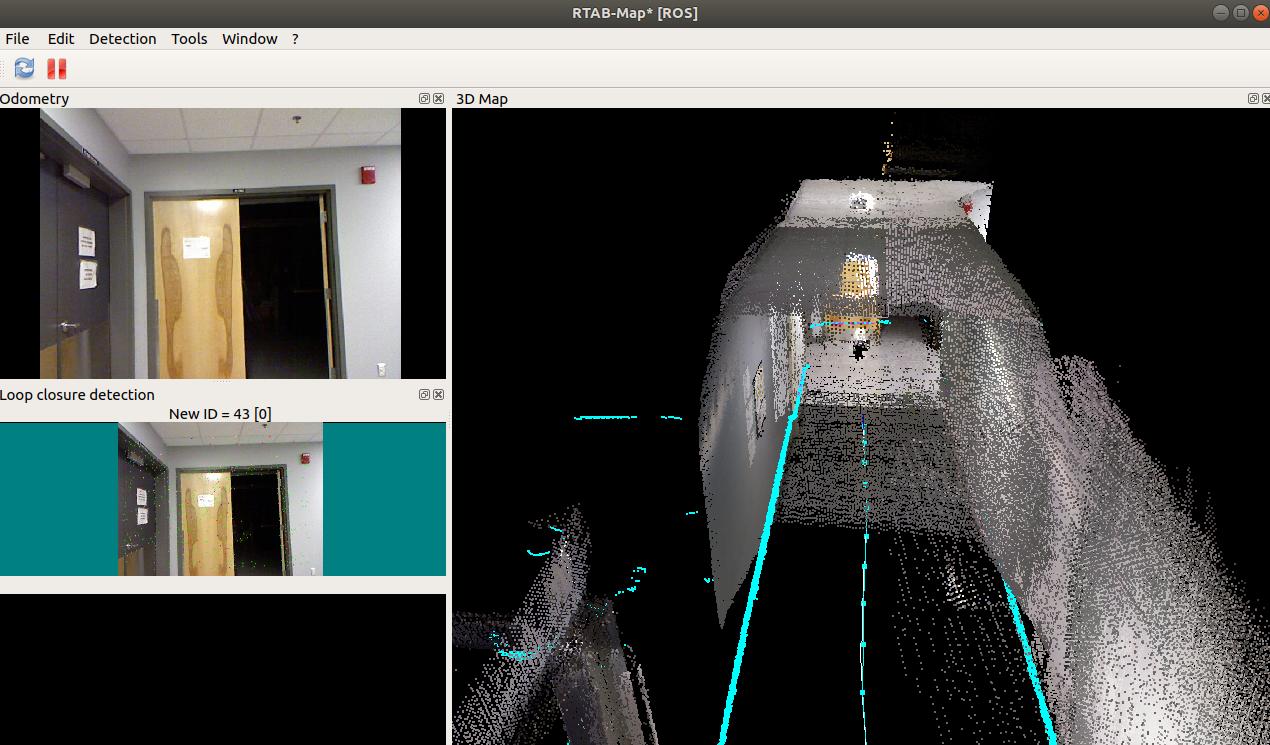
It is like the rosbag is publishing nothing. If you launch with rviz, and set odom frame in global options, do you see what the robot is seeing like in the screenshot below:
roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false rosbag play --clock demo_mapping.bag 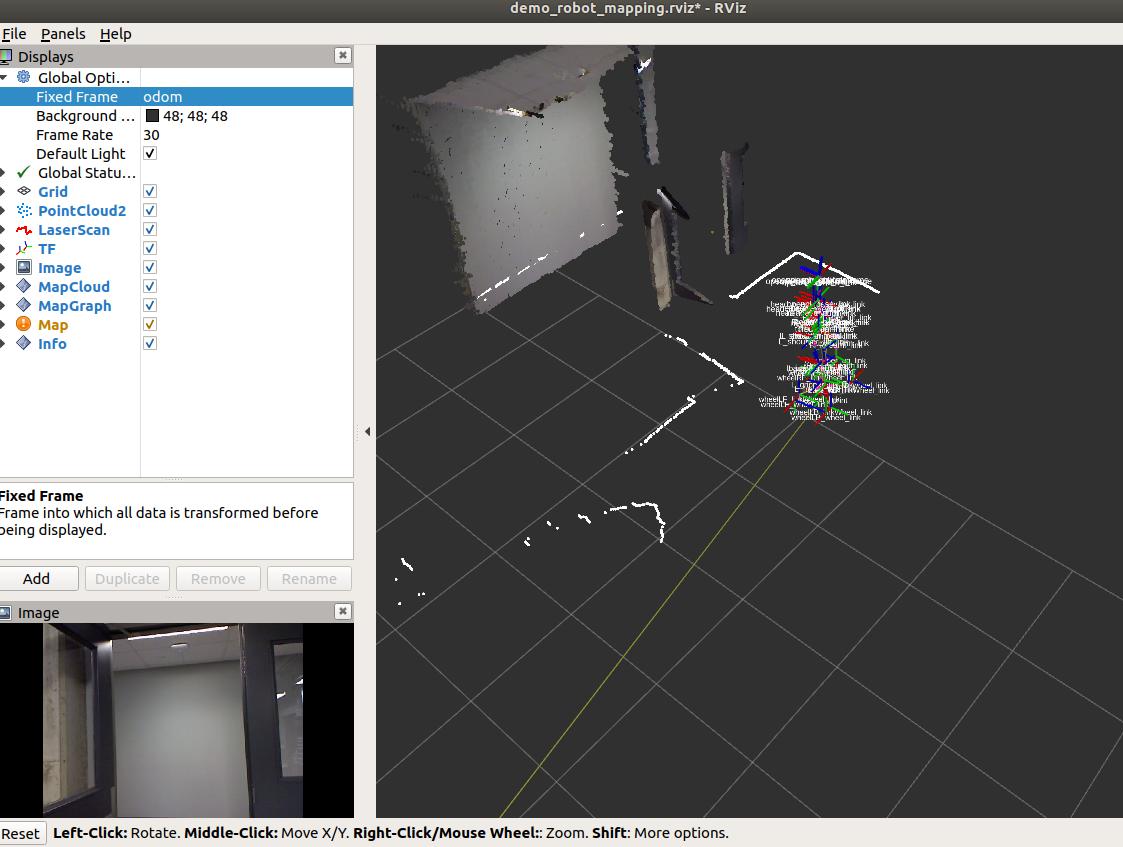
|
|
|
In reply to this post by karishma
Sorry to bother you again sir.
I have tried to see if it works on rviz and ran the below two commands "roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false" terminal 1 "rosbag play --clock demo_mapping.bag" terminal 2 But the problem is, When I run the first command, the laserscan and pointcloud2 show up on the Rviz with a blue tick. And as soon as I run the rosbag command, the laserscan and the pointcloud2 turn into red and show up as errors. Also, another problem is, the position of the thing that first appears slowly disappears right in front of my eyes in less than 5 seconds. And the errors on the laserscan and pointcloud2 may be seen in the below attached screenshots. Kindly please help sir. Regards, Karishma. 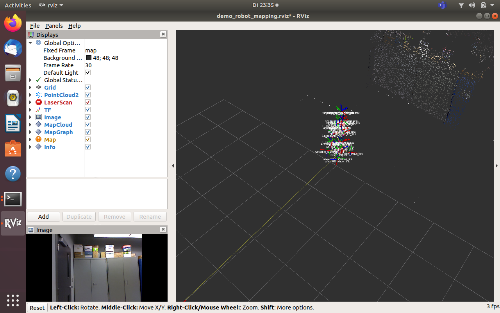 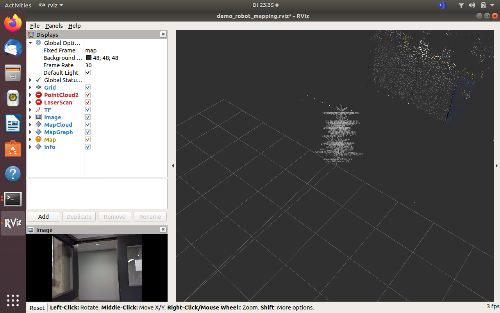  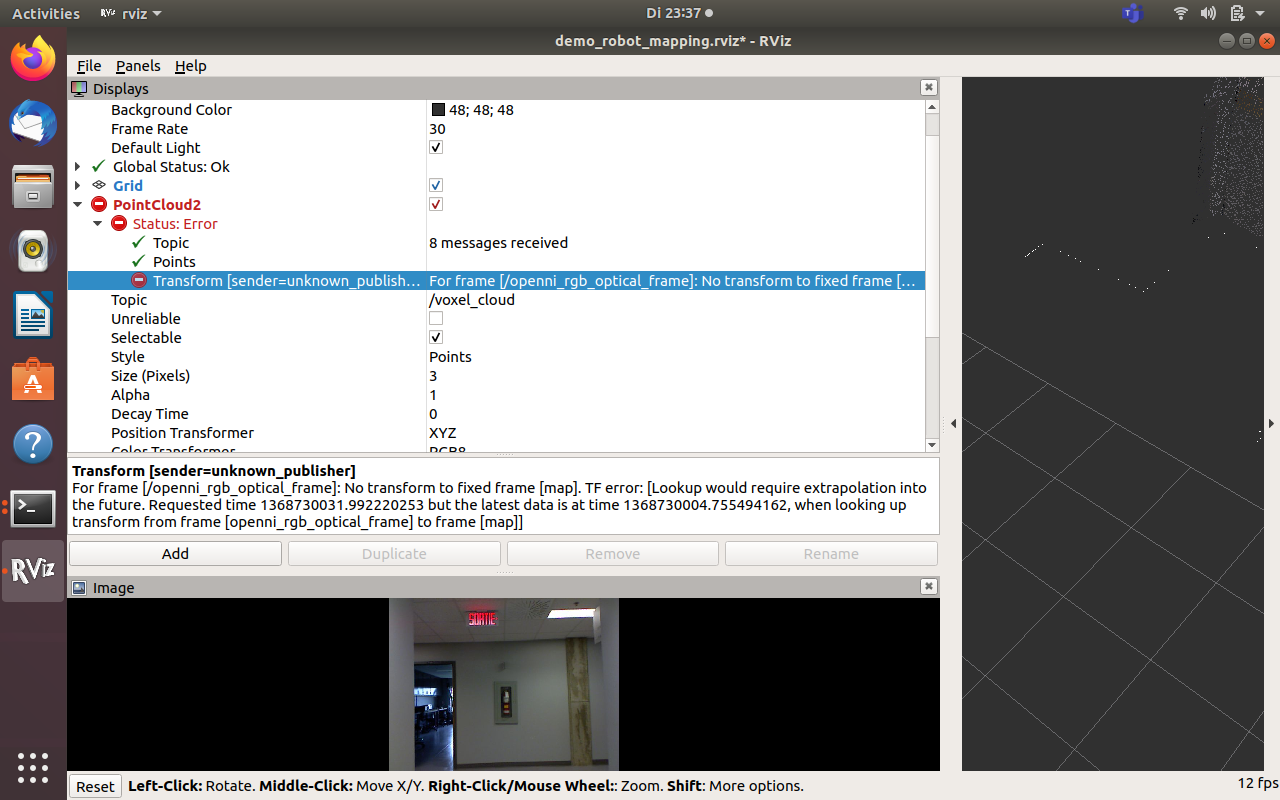 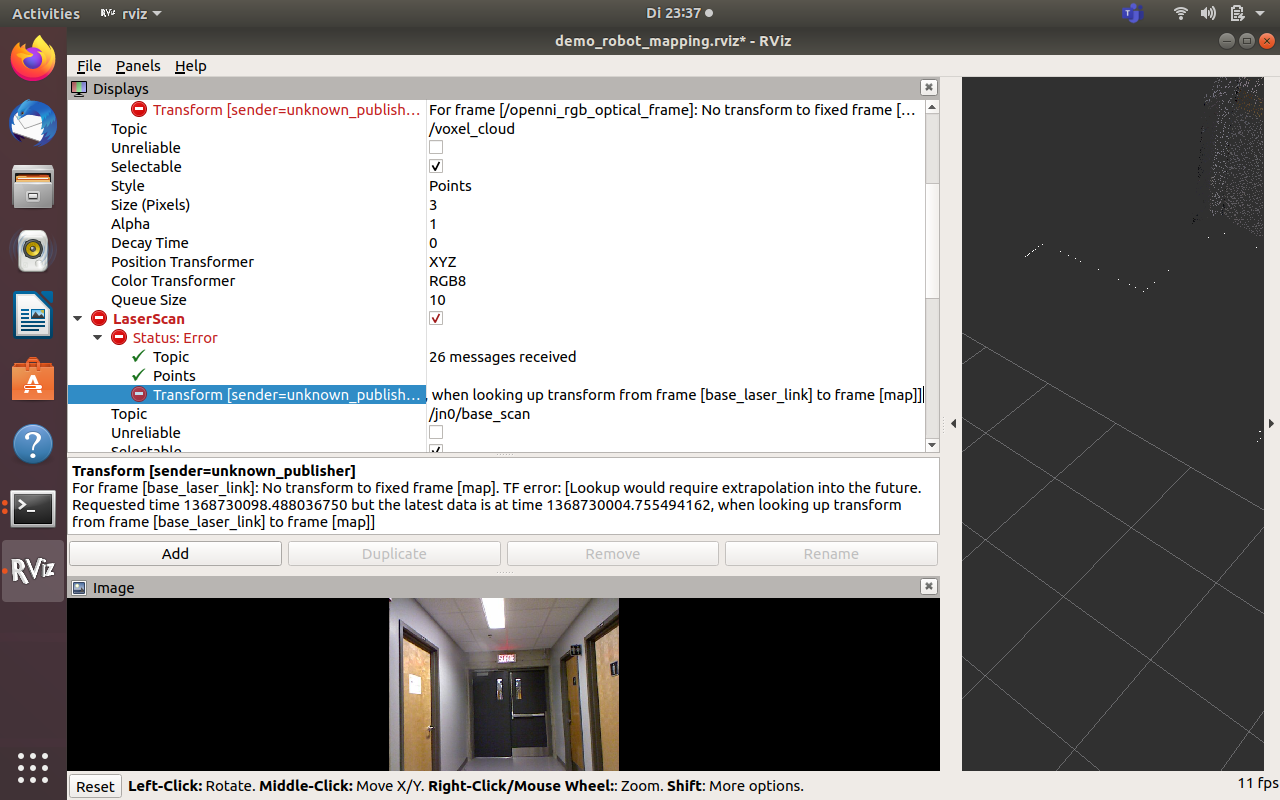
|
|
|
In reply to this post by matlabbe
I have tried as you said changing it to odom sir. It seems to be working, but the point clouds is not as solid as seen in your picture. Would you please see the pictures and tell me if it is right or not.
And would please tell me how to save this to a point cloud. Best regards, Karishma. 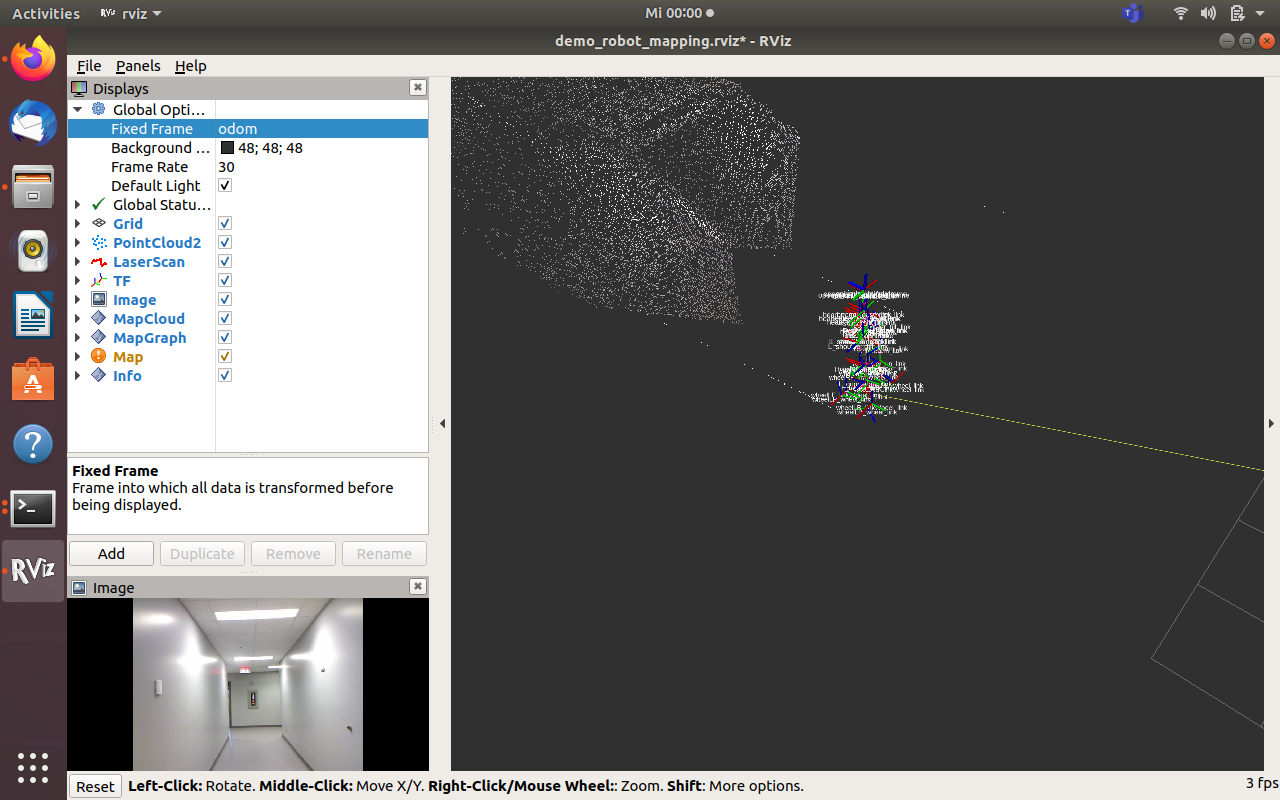 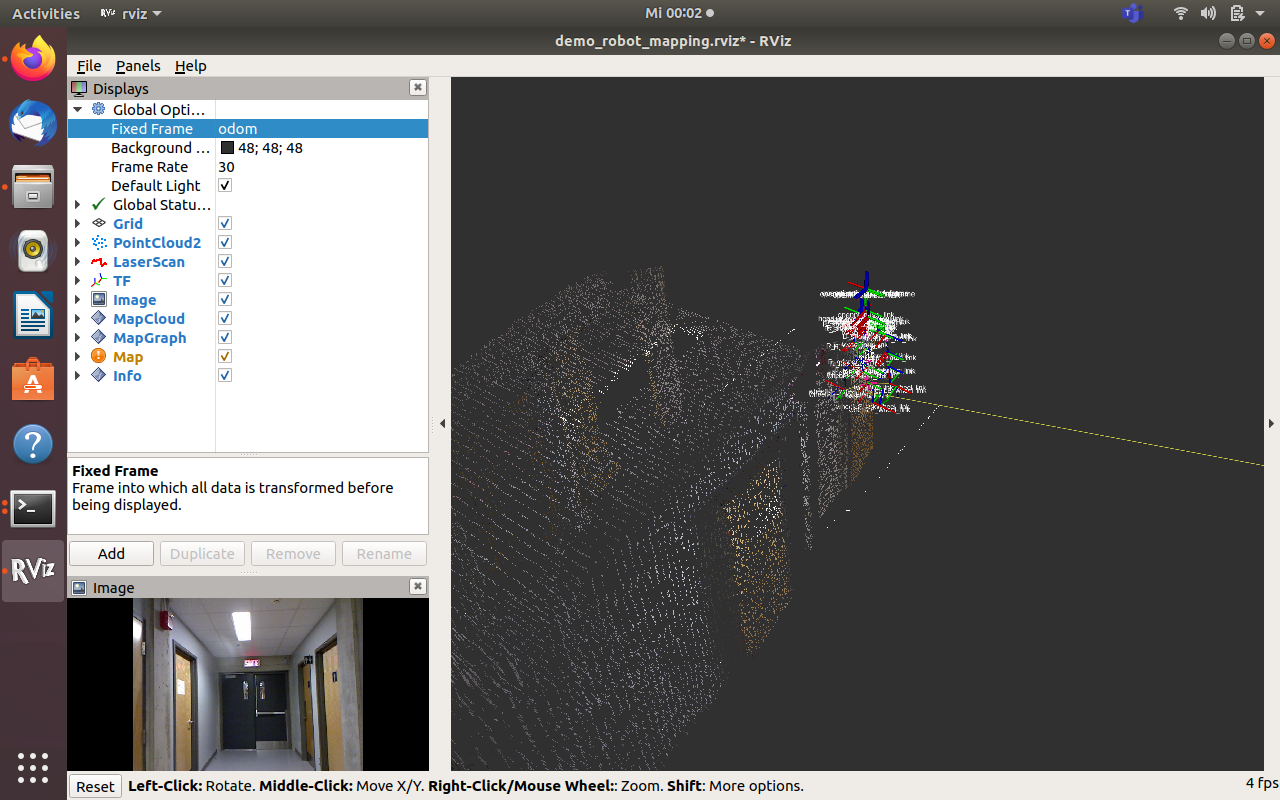
|
|
Administrator
|
This post was updated on .
I think there could be many rtabmap versions on the computer. In one of your post, there is:
[ INFO] [1614712669.393013899]: rtabmap: Database version = "0.20.7". [ INFO] [1614712669.452927858]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1614712669.453052475]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1614712669.453141517]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1614712669.453231289]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1614712669.453300748]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1614712669.453366120]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1614712669.453444709]: /rtabmap/rtabmap: subscribe_scan = true [ INFO] [1614712669.453514395]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1614712669.453572531]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1614712669.453639842]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1614712669.453702684]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1614712669.453865265]: Setup depth callback [ INFO] [1614712669.516314851]: /rtabmap/rtabmap subscribed to (approx sync): /data_throttled_image/compressed \ /data_throttled_image_depth/compressedDepth \ /data_throttled_camera_info \ /jn0/base_scan [ INFO] [1614712669.756795446]: rtabmap 0.20.9 started... The database version 0.20.7 is not the same than rtabmap 0.20.9. In my post above: [ INFO] [1614720804.791864987]: rtabmap: Database version = "0.20.9". [ INFO] [1614720804.814522513]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1614720804.814551231]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1614720804.814564935]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1614720804.814587654]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1614720804.814612088]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1614720804.814637021]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1614720804.814662079]: /rtabmap/rtabmap: subscribe_scan = true [ INFO] [1614720804.814688855]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1614720804.814711388]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1614720804.814734299]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1614720804.814756597]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1614720804.814801405]: Setup depth callback [ INFO] [1614720804.849849994]: /rtabmap/rtabmap subscribed to (approx sync): /data_throttled_image/compressed \ /data_throttled_image_depth/compressedDepth \ /data_throttled_camera_info \ /jn0/base_scan [ INFO] [1614720804.964869469]: rtabmap 0.20.9 started...both versions are 0.20.9. Make sure to uninstall rtabmap binaries (0.20.7): sudo apt remove ros-melodic-rtabmap |
|
|
Hello Sir. Hope you are doing good. Would you please help me in resolving this error, Sir.
I have connected the Kinect 360 camera to the Turtlebot sir. And ran roslaunch freenect_launch freenect.launch it was successful, I am able to visualise what the camera is seeing on the rviz with this command. Now trying to follow this tutorial. Mapping and Navigation with Turtlebot http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot But I am having some issue when running the following commands. 1. roslaunch turtlebot_bringup minimal.launch 2. roslaunch rtabmap_ros demo_turtlebot_mapping.launch or roslaunch rtabmap_ros demo_turtlebot_mapping.launch args:="--delete_db_on_start" 3. roslaunch rtabmap_ros demo_turtlebot_rviz.launch or rosrun rviz rviz -d turtlebot_navigation.rviz ... logging to /home/karishma/.ros/log/428164c4-88a7-11eb-a87f-58946b9358f8/roslaunch-karishma-HP-EliteBook-2540p-27897.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://karishma-HP-EliteBook-2540p:40845/ SUMMARY ======== PARAMETERS * /camera/camera_nodelet_manager/num_worker_threads: 4 * /camera/depth_rectify_depth/interpolation: 0 * /camera/depth_registered_rectify_depth/interpolation: 0 * /camera/disparity_depth/max_range: 4.0 * /camera/disparity_depth/min_range: 0.5 * /camera/disparity_registered_hw/max_range: 4.0 * /camera/disparity_registered_hw/min_range: 0.5 * /camera/disparity_registered_sw/max_range: 4.0 * /camera/disparity_registered_sw/min_range: 0.5 * /camera/driver/depth_camera_info_url: * /camera/driver/depth_frame_id: camera_depth_opti... * /camera/driver/depth_registration: True * /camera/driver/device_id: #1 * /camera/driver/rgb_camera_info_url: * /camera/driver/rgb_frame_id: camera_rgb_optica... * /depthimage_to_laserscan/output_frame_id: camera_depth_frame * /depthimage_to_laserscan/range_min: 0.45 * /depthimage_to_laserscan/scan_height: 10 * /move_base/DWAPlannerROS/acc_lim_theta: 2.0 * /move_base/DWAPlannerROS/acc_lim_x: 1.0 * /move_base/DWAPlannerROS/acc_lim_y: 0.0 * /move_base/DWAPlannerROS/forward_point_distance: 0.325 * /move_base/DWAPlannerROS/global_frame_id: odom * /move_base/DWAPlannerROS/goal_distance_bias: 24.0 * /move_base/DWAPlannerROS/max_rot_vel: 5.0 * /move_base/DWAPlannerROS/max_scaling_factor: 0.2 * /move_base/DWAPlannerROS/max_trans_vel: 0.5 * /move_base/DWAPlannerROS/max_vel_x: 0.5 * /move_base/DWAPlannerROS/max_vel_y: 0.0 * /move_base/DWAPlannerROS/min_rot_vel: 0.4 * /move_base/DWAPlannerROS/min_trans_vel: 0.1 * /move_base/DWAPlannerROS/min_vel_x: 0.0 * /move_base/DWAPlannerROS/min_vel_y: 0.0 * /move_base/DWAPlannerROS/occdist_scale: 0.5 * /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05 * /move_base/DWAPlannerROS/path_distance_bias: 64.0 * /move_base/DWAPlannerROS/publish_cost_grid_pc: True * /move_base/DWAPlannerROS/publish_traj_pc: True * /move_base/DWAPlannerROS/rot_stopped_vel: 0.4 * /move_base/DWAPlannerROS/scaling_speed: 0.25 * /move_base/DWAPlannerROS/sim_time: 1.0 * /move_base/DWAPlannerROS/stop_time_buffer: 0.2 * /move_base/DWAPlannerROS/trans_stopped_vel: 0.1 * /move_base/DWAPlannerROS/vtheta_samples: 20 * /move_base/DWAPlannerROS/vx_samples: 6 * /move_base/DWAPlannerROS/vy_samples: 1 * /move_base/DWAPlannerROS/xy_goal_tolerance: 0.15 * /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.3 * /move_base/GlobalPlanner/allow_unknown: True * /move_base/GlobalPlanner/cost_factor: 3.0 * /move_base/GlobalPlanner/default_tolerance: 0.0 * /move_base/GlobalPlanner/lethal_cost: 253 * /move_base/GlobalPlanner/neutral_cost: 50 * /move_base/GlobalPlanner/old_navfn_behavior: False * /move_base/GlobalPlanner/planner_costmap_publish_frequency: 0.0 * /move_base/GlobalPlanner/planner_window_x: 0.0 * /move_base/GlobalPlanner/planner_window_y: 0.0 * /move_base/GlobalPlanner/publish_potential: True * /move_base/GlobalPlanner/publish_scale: 100 * /move_base/GlobalPlanner/use_dijkstra: True * /move_base/GlobalPlanner/use_grid_path: False * /move_base/GlobalPlanner/use_quadratic: True * /move_base/NavfnROS/allow_unknown: False * /move_base/NavfnROS/default_tolerance: 0.0 * /move_base/NavfnROS/planner_window_x: 0.0 * /move_base/NavfnROS/planner_window_y: 0.0 * /move_base/NavfnROS/visualize_potential: False * /move_base/base_global_planner: navfn/NavfnROS * /move_base/base_local_planner: dwa_local_planner... * /move_base/controller_frequency: 5.0 * /move_base/controller_patience: 3.0 * /move_base/global_costmap/global_frame: map * /move_base/global_costmap/inflation_layer/cost_scaling_factor: 5.0 * /move_base/global_costmap/inflation_layer/enabled: True * /move_base/global_costmap/inflation_layer/inflation_radius: 0.5 * /move_base/global_costmap/map_type: voxel * /move_base/global_costmap/max_obstacle_height: 0.6 * /move_base/global_costmap/obstacle_layer/bump/clearing: False * /move_base/global_costmap/obstacle_layer/bump/data_type: PointCloud2 * /move_base/global_costmap/obstacle_layer/bump/marking: True * /move_base/global_costmap/obstacle_layer/bump/max_obstacle_height: 0.15 * /move_base/global_costmap/obstacle_layer/bump/min_obstacle_height: 0.0 * /move_base/global_costmap/obstacle_layer/bump/topic: mobile_base/senso... * /move_base/global_costmap/obstacle_layer/combination_method: 1 * /move_base/global_costmap/obstacle_layer/enabled: True * /move_base/global_costmap/obstacle_layer/mark_threshold: 0 * /move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.6 * /move_base/global_costmap/obstacle_layer/observation_sources: scan bump * /move_base/global_costmap/obstacle_layer/obstacle_range: 2.5 * /move_base/global_costmap/obstacle_layer/origin_z: 0.0 * /move_base/global_costmap/obstacle_layer/publish_voxel_map: False * /move_base/global_costmap/obstacle_layer/raytrace_range: 3.0 * /move_base/global_costmap/obstacle_layer/scan/clearing: True * /move_base/global_costmap/obstacle_layer/scan/data_type: LaserScan * /move_base/global_costmap/obstacle_layer/scan/marking: True * /move_base/global_costmap/obstacle_layer/scan/max_obstacle_height: 0.35 * /move_base/global_costmap/obstacle_layer/scan/min_obstacle_height: 0.25 * /move_base/global_costmap/obstacle_layer/scan/topic: scan * /move_base/global_costmap/obstacle_layer/track_unknown_space: True * /move_base/global_costmap/obstacle_layer/unknown_threshold: 15 * /move_base/global_costmap/obstacle_layer/z_resolution: 0.2 * /move_base/global_costmap/obstacle_layer/z_voxels: 2 * /move_base/global_costmap/plugins: [{'type': 'costma... * /move_base/global_costmap/publish_frequency: 0.5 * /move_base/global_costmap/robot_base_frame: base_footprint * /move_base/global_costmap/robot_radius: 0.2 * /move_base/global_costmap/static_layer/enabled: True * /move_base/global_costmap/static_map: True * /move_base/global_costmap/transform_tolerance: 0.5 * /move_base/global_costmap/update_frequency: 1.0 * /move_base/local_costmap/global_frame: odom * /move_base/local_costmap/height: 4.0 * /move_base/local_costmap/inflation_layer/cost_scaling_factor: 5.0 * /move_base/local_costmap/inflation_layer/enabled: True * /move_base/local_costmap/inflation_layer/inflation_radius: 0.5 * /move_base/local_costmap/map_type: voxel * /move_base/local_costmap/max_obstacle_height: 0.6 * /move_base/local_costmap/obstacle_layer/bump/clearing: False * /move_base/local_costmap/obstacle_layer/bump/data_type: PointCloud2 * /move_base/local_costmap/obstacle_layer/bump/marking: True * /move_base/local_costmap/obstacle_layer/bump/max_obstacle_height: 0.15 * /move_base/local_costmap/obstacle_layer/bump/min_obstacle_height: 0.0 * /move_base/local_costmap/obstacle_layer/bump/topic: mobile_base/senso... * /move_base/local_costmap/obstacle_layer/combination_method: 1 * /move_base/local_costmap/obstacle_layer/enabled: True * /move_base/local_costmap/obstacle_layer/mark_threshold: 0 * /move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.6 * /move_base/local_costmap/obstacle_layer/observation_sources: scan bump * /move_base/local_costmap/obstacle_layer/obstacle_range: 2.5 * /move_base/local_costmap/obstacle_layer/origin_z: 0.0 * /move_base/local_costmap/obstacle_layer/publish_voxel_map: False * /move_base/local_costmap/obstacle_layer/raytrace_range: 3.0 * /move_base/local_costmap/obstacle_layer/scan/clearing: True * /move_base/local_costmap/obstacle_layer/scan/data_type: LaserScan * /move_base/local_costmap/obstacle_layer/scan/marking: True * /move_base/local_costmap/obstacle_layer/scan/max_obstacle_height: 0.35 * /move_base/local_costmap/obstacle_layer/scan/min_obstacle_height: 0.25 * /move_base/local_costmap/obstacle_layer/scan/topic: scan * /move_base/local_costmap/obstacle_layer/track_unknown_space: True * /move_base/local_costmap/obstacle_layer/unknown_threshold: 15 * /move_base/local_costmap/obstacle_layer/z_resolution: 0.2 * /move_base/local_costmap/obstacle_layer/z_voxels: 2 * /move_base/local_costmap/plugins: [{'type': 'costma... * /move_base/local_costmap/publish_frequency: 2.0 * /move_base/local_costmap/resolution: 0.05 * /move_base/local_costmap/robot_base_frame: base_footprint * /move_base/local_costmap/robot_radius: 0.2 * /move_base/local_costmap/rolling_window: True * /move_base/local_costmap/static_layer/enabled: True * /move_base/local_costmap/static_map: False * /move_base/local_costmap/transform_tolerance: 0.5 * /move_base/local_costmap/update_frequency: 5.0 * /move_base/local_costmap/width: 4.0 * /move_base/oscillation_distance: 0.2 * /move_base/oscillation_timeout: 10.0 * /move_base/planner_frequency: 1.0 * /move_base/planner_patience: 5.0 * /move_base/shutdown_costmaps: False * /navigation_velocity_smoother/accel_lim_v: 1.0 * /navigation_velocity_smoother/accel_lim_w: 2.0 * /navigation_velocity_smoother/decel_factor: 1.5 * /navigation_velocity_smoother/frequency: 20.0 * /navigation_velocity_smoother/robot_feedback: 2 * /navigation_velocity_smoother/speed_lim_v: 0.8 * /navigation_velocity_smoother/speed_lim_w: 5.4 * /rosdistro: melodic * /rosversion: 1.14.10 * /rtabmap/rtabmap/GridGlobal/MinSize: 20 * /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.3 * /rtabmap/rtabmap/Kp/MaxDepth: 4.0 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/Mem/RehearsalSimilarity: 0.30 * /rtabmap/rtabmap/RGBD/AngularUpdate: 0.1 * /rtabmap/rtabmap/RGBD/LinearUpdate: 0.1 * /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false * /rtabmap/rtabmap/RGBD/ProximityBySpace: true * /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 0 * /rtabmap/rtabmap/Reg/Force3DoF: true * /rtabmap/rtabmap/Reg/Strategy: 0 * /rtabmap/rtabmap/Rtabmap/TimeThr: 0 * /rtabmap/rtabmap/Vis/InlierDistance: 0.1 * /rtabmap/rtabmap/Vis/MinInliers: 15 * /rtabmap/rtabmap/database_path: rtabmap.db * /rtabmap/rtabmap/frame_id: base_footprint * /rtabmap/rtabmap/map_negative_poses_ignored: True * /rtabmap/rtabmap/odom_frame_id: odom * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_scan: True * /rtabmap/rtabmap/use_action_for_goal: True * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 NODES / depthimage_to_laserscan (nodelet/nodelet) kobuki_safety_controller (nodelet/nodelet) move_base (move_base/move_base) navigation_velocity_smoother (nodelet/nodelet) /camera/ camera_nodelet_manager (nodelet/nodelet) depth_metric (nodelet/nodelet) depth_metric_rect (nodelet/nodelet) depth_points (nodelet/nodelet) depth_rectify_depth (nodelet/nodelet) depth_registered_hw_metric_rect (nodelet/nodelet) depth_registered_metric (nodelet/nodelet) depth_registered_rectify_depth (nodelet/nodelet) depth_registered_sw_metric_rect (nodelet/nodelet) disparity_depth (nodelet/nodelet) disparity_registered_hw (nodelet/nodelet) disparity_registered_sw (nodelet/nodelet) driver (nodelet/nodelet) ir_rectify_ir (nodelet/nodelet) points_xyzrgb_hw_registered (nodelet/nodelet) points_xyzrgb_sw_registered (nodelet/nodelet) register_depth_rgb (nodelet/nodelet) rgb_debayer (nodelet/nodelet) rgb_rectify_color (nodelet/nodelet) rgb_rectify_mono (nodelet/nodelet) /rtabmap/ rtabmap (rtabmap_ros/rtabmap) ROS_MASTER_URI=http://localhost:11311 process[camera/camera_nodelet_manager-1]: started with pid [27912] process[camera/driver-2]: started with pid [27913] process[camera/rgb_debayer-3]: started with pid [27914] process[camera/rgb_rectify_mono-4]: started with pid [27916] process[camera/rgb_rectify_color-5]: started with pid [27926] process[camera/ir_rectify_ir-6]: started with pid [27931] process[camera/depth_rectify_depth-7]: started with pid [27933] process[camera/depth_metric_rect-8]: started with pid [27944] process[camera/depth_metric-9]: started with pid [27945] process[camera/depth_points-10]: started with pid [27950] process[camera/register_depth_rgb-11]: started with pid [27954] process[camera/points_xyzrgb_sw_registered-12]: started with pid [27970] process[camera/depth_registered_sw_metric_rect-13]: started with pid [27976] process[camera/depth_registered_rectify_depth-14]: started with pid [27977] process[camera/points_xyzrgb_hw_registered-15]: started with pid [27987] [ INFO] [1616153872.730275151]: Initializing nodelet with 4 worker threads. process[camera/depth_registered_hw_metric_rect-16]: started with pid [27995] process[camera/depth_registered_metric-17]: started with pid [28000] process[camera/disparity_depth-18]: started with pid [28005] process[camera/disparity_registered_sw-19]: started with pid [28009] process[camera/disparity_registered_hw-20]: started with pid [28019] process[depthimage_to_laserscan-21]: started with pid [28021] process[navigation_velocity_smoother-22]: started with pid [28027] process[kobuki_safety_controller-23]: started with pid [28031] process[move_base-24]: started with pid [28033] process[rtabmap/rtabmap-25]: started with pid [28053] [ INFO] [1616153875.220225293]: Number devices connected: 1 [ INFO] [1616153875.220489561]: 1. device on bus 002:08 is a SensorV2 (2ae) from PrimeSense (45e) with serial id 'A00365A17103107A' [ INFO] [1616153875.221571227]: Searching for device with index = 1 [ INFO] [1616153875.267454029]: Opened 'SensorV2' on bus 2:8 with serial number 'A00365A17103107A' [ INFO] [1616153875.358321723]: rgb_frame_id = 'camera_rgb_optical_frame' [ INFO] [1616153875.358510803]: depth_frame_id = 'camera_depth_optical_frame' [ WARN] [1616153875.368479004]: Camera calibration file /home/karishma/.ros/camera_info/rgb_A00365A17103107A.yaml not found. [ WARN] [1616153875.368629187]: Using default parameters for RGB camera calibration. [ WARN] [1616153875.368718771]: Camera calibration file /home/karishma/.ros/camera_info/depth_A00365A17103107A.yaml not found. [ WARN] [1616153875.368762189]: Using default parameters for IR camera calibration. [ WARN] [1616153878.210704394]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100223 timeout was 0.1. [ INFO] [1616153880.874562042]: Starting node... [ INFO] [1616153881.008704120]: Initializing nodelet with 4 worker threads. [ WARN] [1616153883.243328301]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100936 timeout was 0.1. [ WARN] [1616153883.735497061]: Parameter "map_negative_poses_ignored" has been removed. Use "map_always_update" instead. [ INFO] [1616153883.741953336]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1616153883.742039204]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1616153883.742081089]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1616153883.742158113]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1616153883.742211014]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1616153883.742256705]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1616153883.742303635]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1616153883.742352246]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1616153883.750634967]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1616153883.800831215]: rtabmap: frame_id = base_footprint [ INFO] [1616153883.801021107]: rtabmap: odom_frame_id = odom [ INFO] [1616153883.801167743]: rtabmap: map_frame_id = map [ INFO] [1616153883.801250833]: rtabmap: use_action_for_goal = true [ INFO] [1616153883.801346468]: rtabmap: tf_delay = 0.050000 [ INFO] [1616153883.801453295]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1616153883.801558569]: rtabmap: odom_sensor_sync = false [ INFO] [1616153883.802744537]: rtabmap: gen_scan = false [ INFO] [1616153883.802868368]: rtabmap: gen_depth = false [ INFO] [1616153883.996314152]: Setting RTAB-Map parameter "GridGlobal/MinSize"="20" [ INFO] [1616153884.014120471]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.3" [ INFO] [1616153884.122356962]: Setting RTAB-Map parameter "Kp/MaxDepth"="4.0" [ INFO] [1616153884.193559982]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1616153884.194711593]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1616153884.227957964]: Setting RTAB-Map parameter "Mem/RehearsalSimilarity"="0.30" [ INFO] [1616153884.300554029]: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.1" [ INFO] [1616153884.313606143]: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.1" [ INFO] [1616153884.343636915]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false" [ INFO] [1616153884.362175855]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true" [ INFO] [1616153884.375223284]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="0" [ INFO] [1616153884.382349619]: Setting RTAB-Map parameter "Reg/Force3DoF"="true" [ INFO] [1616153884.385844914]: Setting RTAB-Map parameter "Reg/Strategy"="0" [ INFO] [1616153884.440451981]: Setting RTAB-Map parameter "Rtabmap/TimeThr"="0" [ INFO] [1616153884.619648684]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.1" [ INFO] [1616153884.636867068]: Setting RTAB-Map parameter "Vis/MinInliers"="15" [ WARN] [1616153885.018507885]: Setting "Grid/FromDepth" parameter to false (default true) as "subscribe_scan", "subscribe_scan_cloud" or "gen_scan" is true. The occupancy grid map will be constructed from laser scans. To get occupancy grid map from cloud projection, set "Grid/FromDepth" to true. To suppress this warning, add [ INFO] [1616153885.018930573]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan", "subscribe_scan_cloud" or "gen_scan" is true and Grid/FromDepth is false. [ INFO] [1616153885.021477548]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1616153885.046420517]: rtabmap: Deleted database "/home/karishma/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1616153885.046618980]: rtabmap: Using database from "/home/karishma/.ros/rtabmap.db" (0 MB). [ INFO] [1616153887.412567560]: rtabmap: Database version = "0.20.7". [ INFO] [1616153887.489671910]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1616153887.489785396]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1616153887.489842092]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1616153887.489902915]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1616153887.489959975]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1616153887.490020536]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1616153887.490084790]: /rtabmap/rtabmap: subscribe_scan = true [ INFO] [1616153887.490143346]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1616153887.490200795]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1616153887.490260584]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1616153887.490319170]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1616153887.490418664]: Setup depth callback [ WARN] [1616153887.606943147]: global_costmap: Pre-Hydro parameter "static_map" unused since "plugins" is provided [ WARN] [1616153887.607679873]: global_costmap: Pre-Hydro parameter "map_type" unused since "plugins" is provided [ INFO] [1616153887.609185648]: global_costmap: Using plugin "static_layer" [ INFO] [1616153887.653415805]: Requesting the map... [ INFO] [1616153887.682041146]: /rtabmap/rtabmap subscribed to (approx sync): /camera/rgb/image_rect_color \ /camera/depth_registered/image_raw \ /camera/rgb/camera_info \ /scan [ INFO] [1616153888.059506247]: rtabmap 0.20.9 started... [rtabmap/rtabmap-25] process has died [pid 28053, exit code -11, cmd /home/karishma/tk_ws/devel/lib/rtabmap_ros/rtabmap --delete_db_on_start move_base:=/move_base scan:=/scan rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth_registered/image_raw rgb/camera_info:=/camera/rgb/camera_info grid_map:=/map __name:=rtabmap __log:=/home/karishma/.ros/log/428164c4-88a7-11eb-a87f-58946b9358f8/rtabmap-rtabmap-25.log]. log file: /home/karishma/.ros/log/428164c4-88a7-11eb-a87f-58946b9358f8/rtabmap-rtabmap-25*.log Kindly please help. Best regards, Karishma. 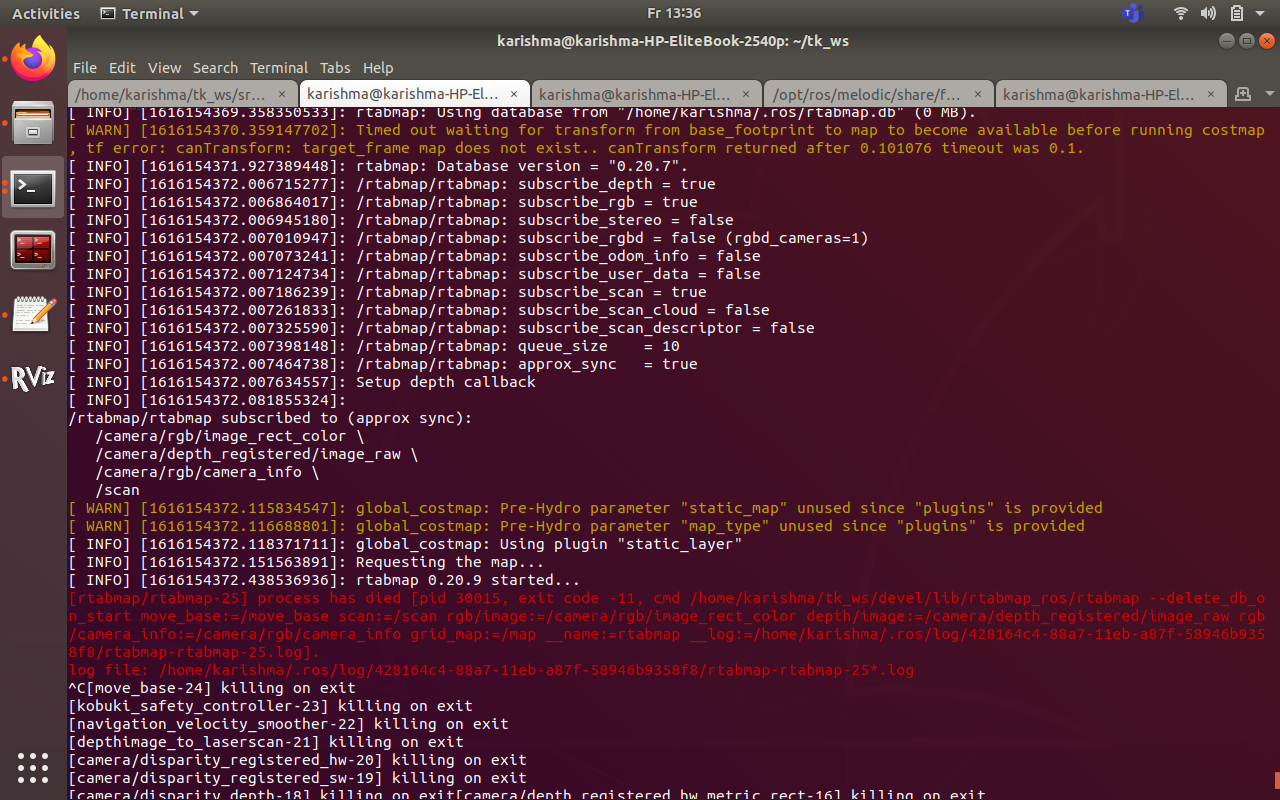 
|
|
Administrator
|
The wrong libraries are loaded at runtime. Uninstall rtabmap 0.20.7:
sudo apt remove ros-melodic-rtabmap |
|
|
Hello Sir,
Hope you are doing good. I have realised that with the plain 2d lidar and odometry, we can do the rtabmap mapping. 1. Would you please tell, how and where to add the changes to enable a rplidar (/scan topic) and turtlebot(/odom topic) for the rtabmap? 2. I have succesfully run the kinect + turtlebot $ roslaunch turtlebot_bringup minimal.launch $ roslaunch rtabmap_ros demo_turtlebot_mapping.launch $ roslaunch rtabmap_ros demo_turtlebot_rviz.launch With the above 3 commands running, I was able to visualise the picture I have added here. But I am now, not able to follow the next steps. Should I teleop the turtlebot and save the map (with map_server and map_saver) on rviz and if I am wrong, how? or should I close it all the previous 3 commands and start the localisation segment. Localization mode After a mapping session as above, a database is saved here ~/.ros/rtabmap.db. Now restart the demo_turtlebot_mapping.launch with argument localization:=true: $ roslaunch rtabmap_ros demo_turtlebot_mapping.launch localization:=true Move the robot around until it can relocalize in the previous map, then the 2D map would re-appear again when a loop closure is found. 3. and the autonomous navigation segment part also, Sir. Best regards Sir, Karishma 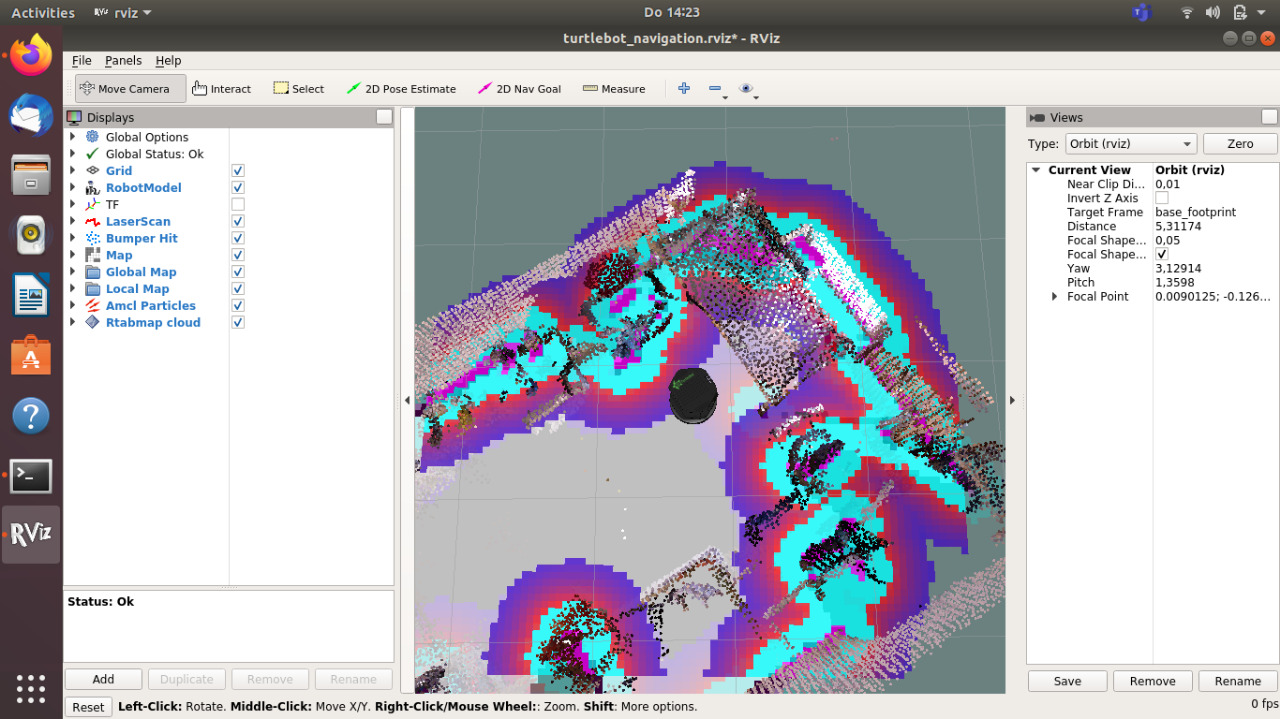
|
|
|
Warm Greetings sir,
May I ask, if you have looked into my problem? Just a gentle reminder, sir. Please don't mistake. I really have no one to guide me. I respect your patience and willingness to help people and students like us. Your help so far has turned out to give me results. Thank you very much for everything. Best regards Sir, Karishma |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |