Hi Anthony,
This was a nice rosbag to test, thx!
I started from the parameters from this
post, then I moved to point to plane registration and decreased voxel size (also added option to assemble ALL velodyne point clouds):
roslaunch rtabmap_ros rtabmap.launch \
use_sim_time:=true \
depth:=false \
subscribe_scan_cloud:=true \
frame_id:=base_link \
scan_cloud_topic:=/velodyne_points_half \
scan_cloud_max_points:=15000 \
icp_odometry:=true \
approx_sync:=false \
scan_cloud_assembling:=true \
scan_cloud_assembling_voxel_size:=0 \
args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 0 \
--Odom/ScanKeyFrameThr 0.5 \
--OdomF2M/ScanMaxSize 30000 \
--OdomF2M/ScanSubtractRadius 0.3 \
--Icp/PM true \
--Icp/VoxelSize 0.3 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 10 \
--Icp/PointToPlane true \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 1 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 10 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01 \
--Icp/PointToPlaneGroundNormalsUp 0.3"
I noticed that the velodyne clouds were doubled (easier to see when the car moved faster), reducing ICP accuracy. I think the velodyne was turning at 20 Hz (1200 RPM) but the velodyne_point_cloud node was started at 600 rpm, thus accumulating two rotations in single point cloud. I used this script to remove one rotation:
#!/usr/bin/env python
import rospy
import math
from sensor_msgs.msg import PointCloud2
def callback(cloud):
global cloud_pub;
cloud.width = math.ceil(cloud.width/2)
cloud.row_step = cloud.width * cloud.point_step
cloud.data = cloud.data[0:cloud.row_step]
cloud_pub.publish(cloud)
if __name__ == '__main__':
global cloud_pub
rospy.init_node('scan_cut_half', anonymous=True)
cloud_pub = rospy.Publisher('/velodyne_points_half', PointCloud2, queue_size=1)
cloud_sub = rospy.Subscriber('/velodyne_points', PointCloud2, callback)
rospy.spin()
I guessed the velodyne orientation on the car (I think your 15 meters transform between imu and velodyne was wrong):
rosrun tf2_ros static_transform_publisher 0 0 1.7 -0.6 0.35 -0.15 base_link velodyne
Then I started the bag:
rosbag play --clock vlp_t265_capture_1.bag
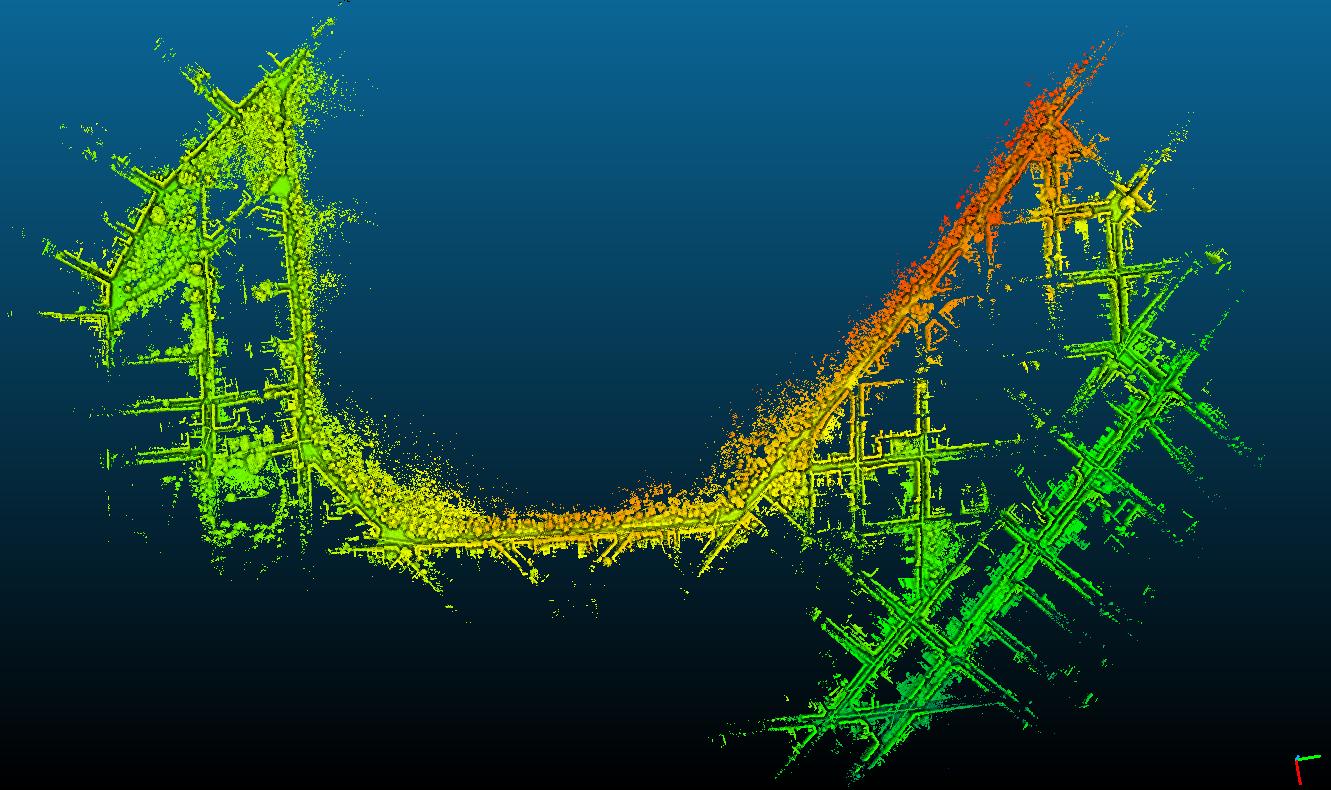
You may get something like this (there is a large gap between the beginning and end position, cause by some orientation errors):
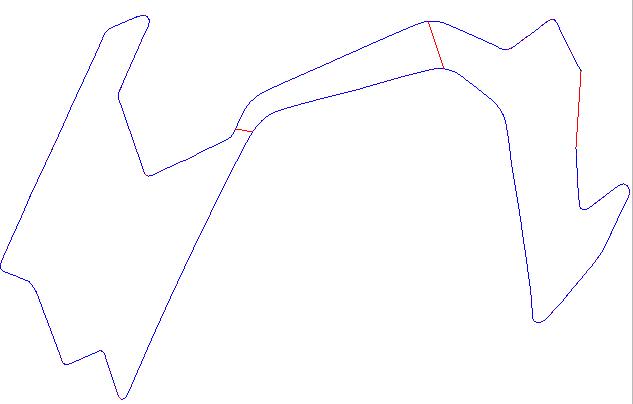
The red links are the loop closures I added (here after optimization):
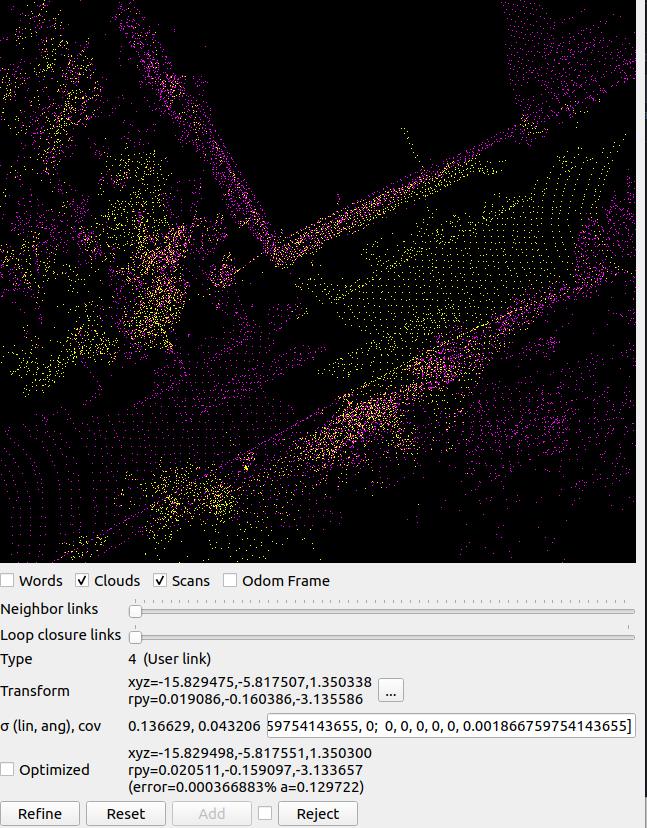
I added manually the loop closures like this, from two places we know they are the same, traversed in different directions:
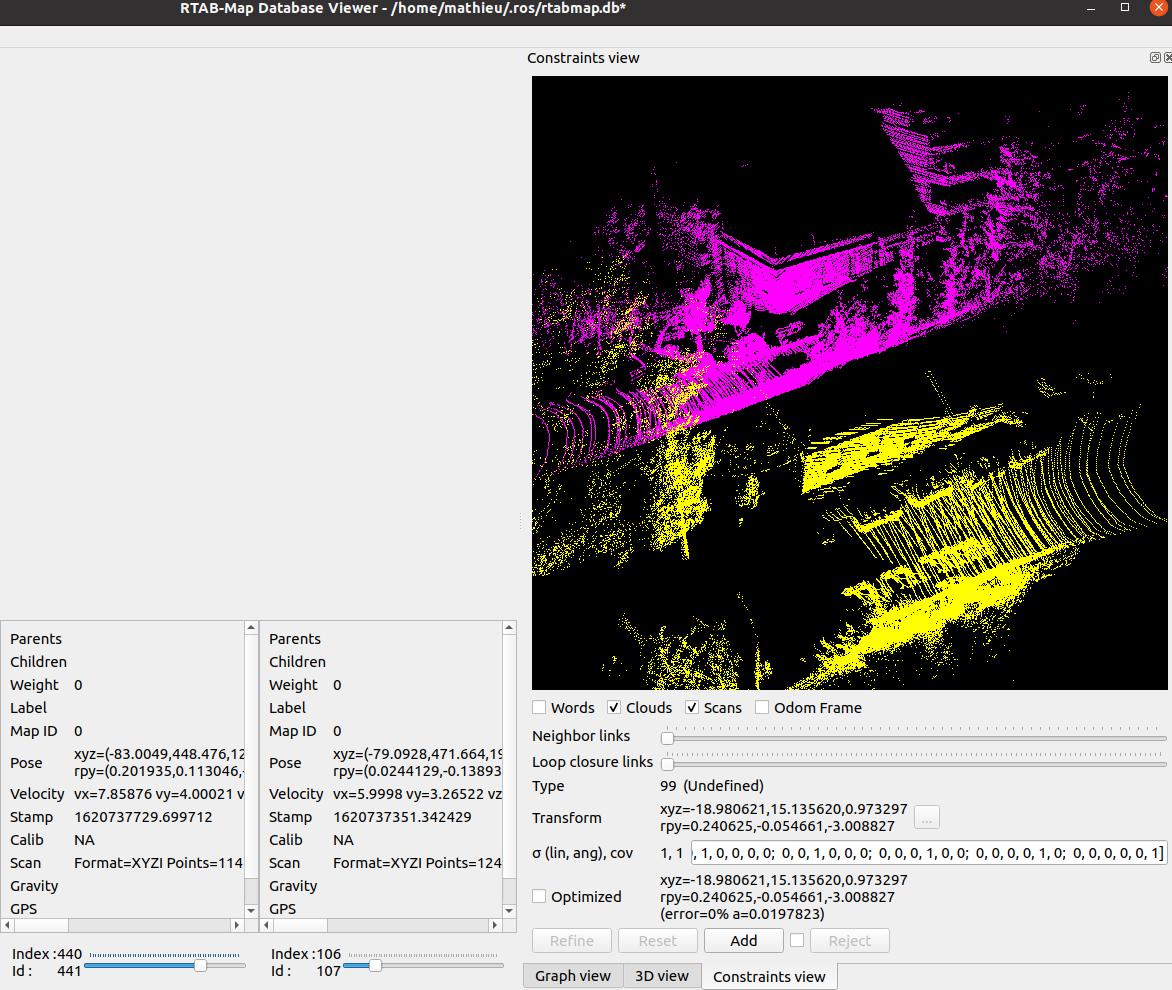
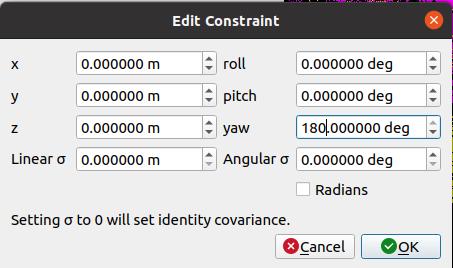
Click add, then add manually a transform with 180 deg yaw:
Manually adjust the transform ([...] button) and hit refine:
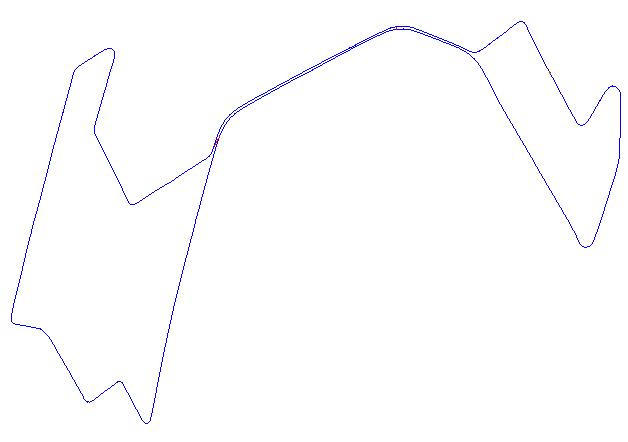
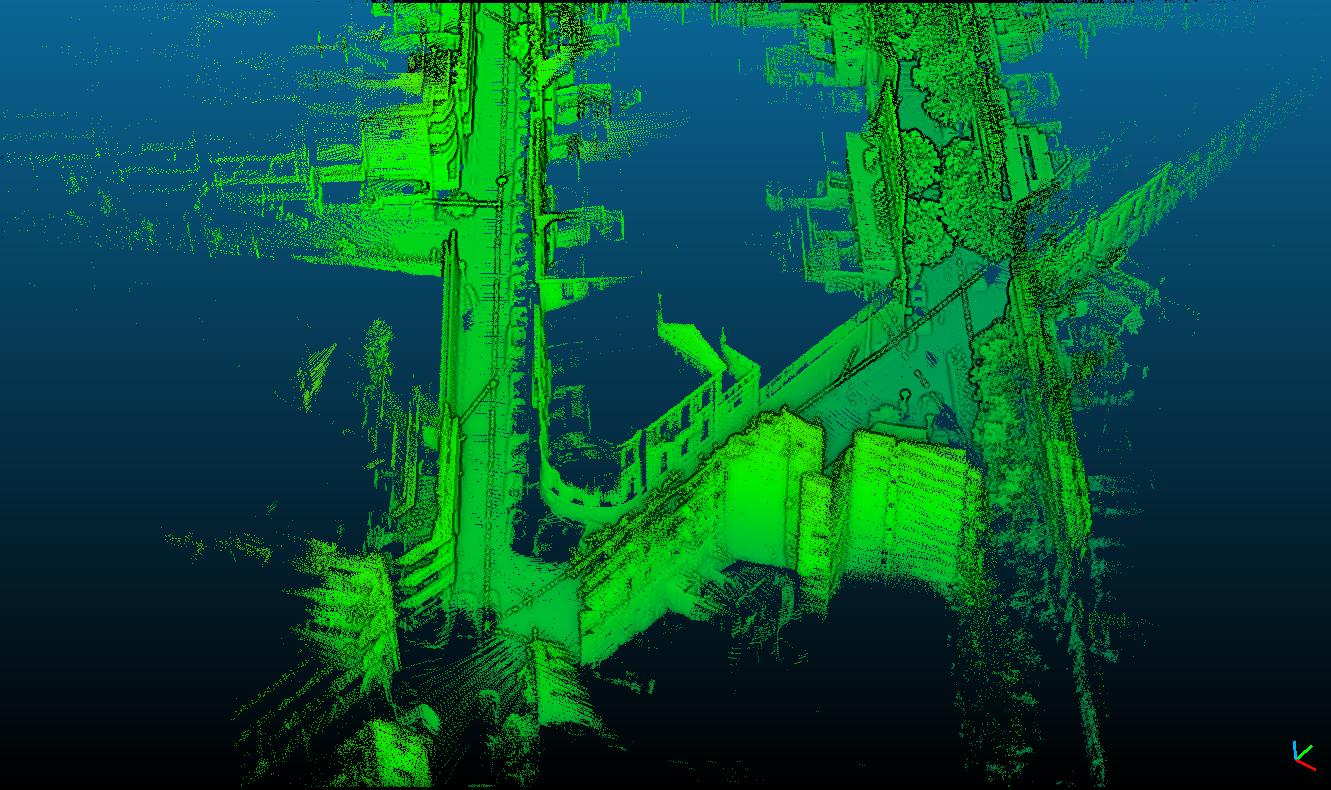
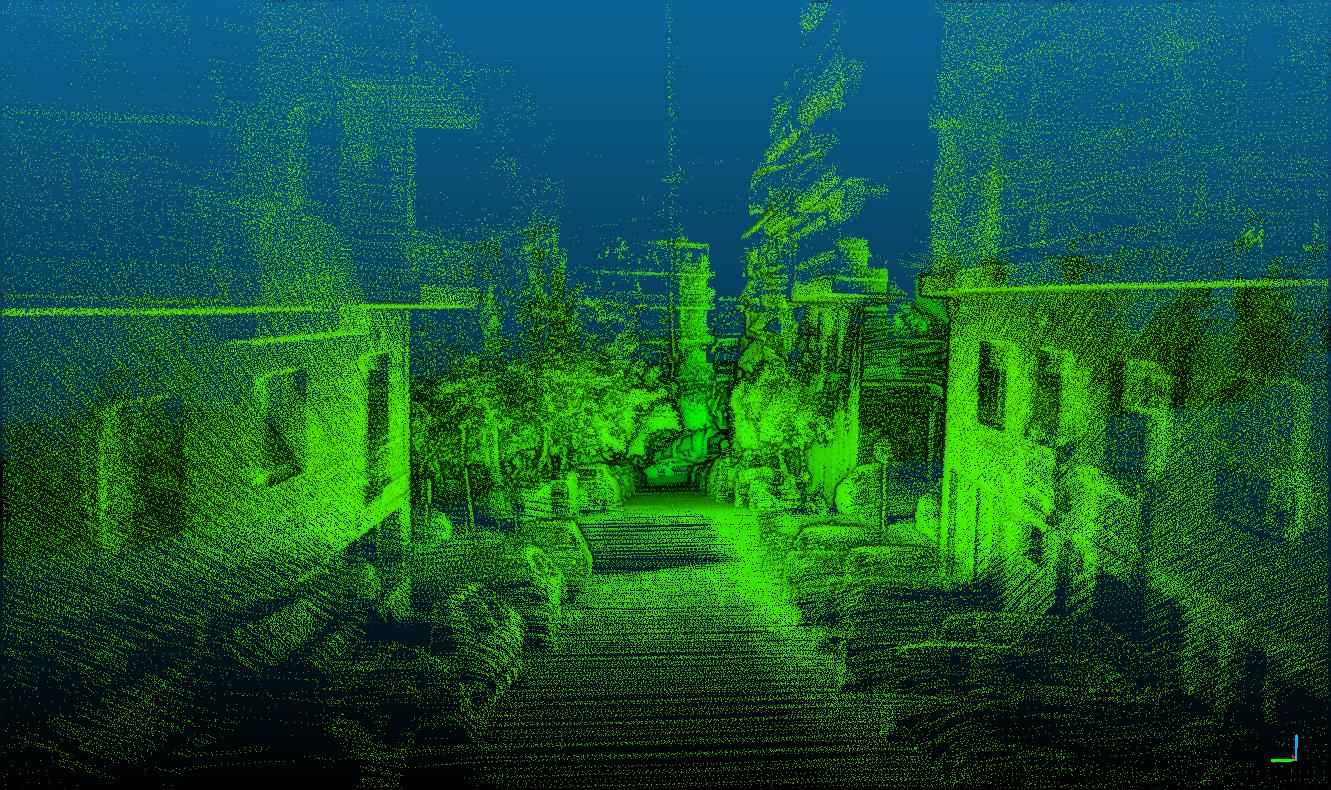
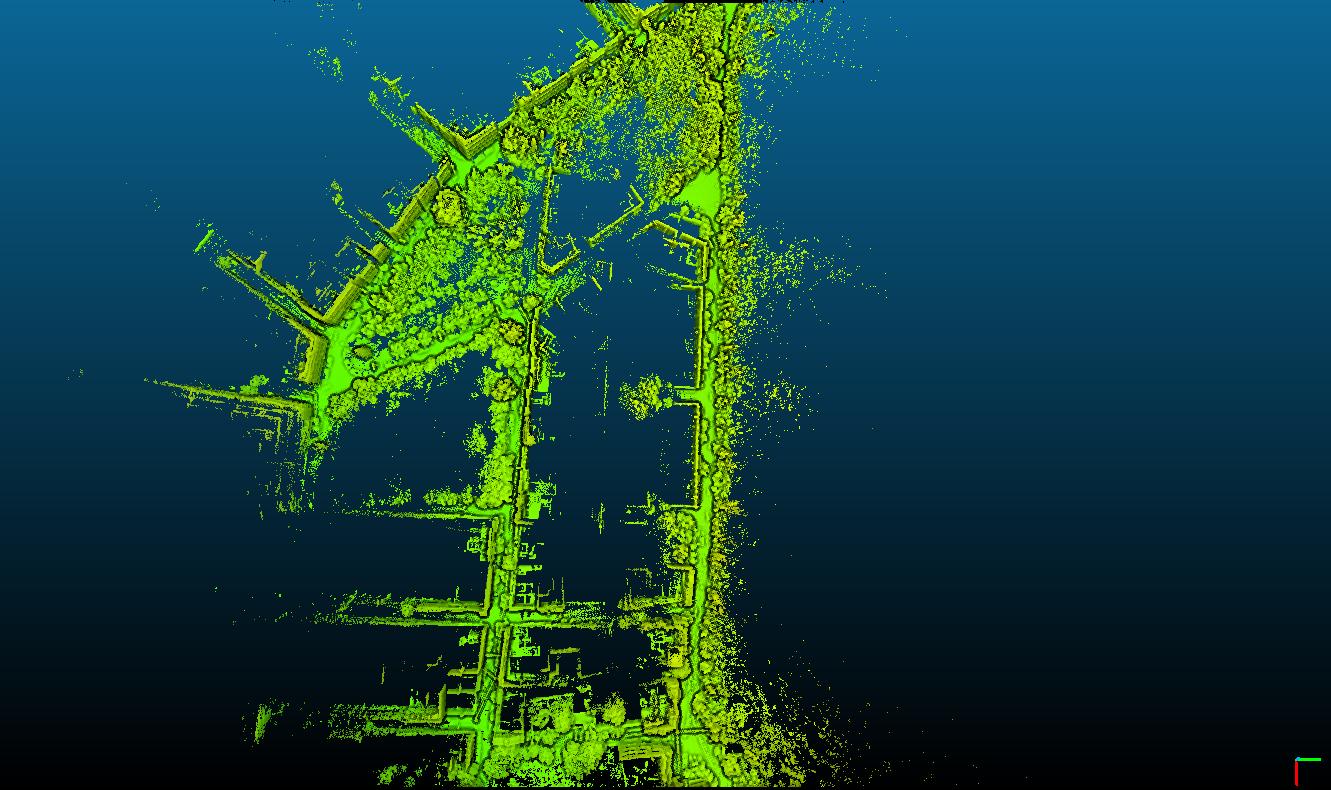
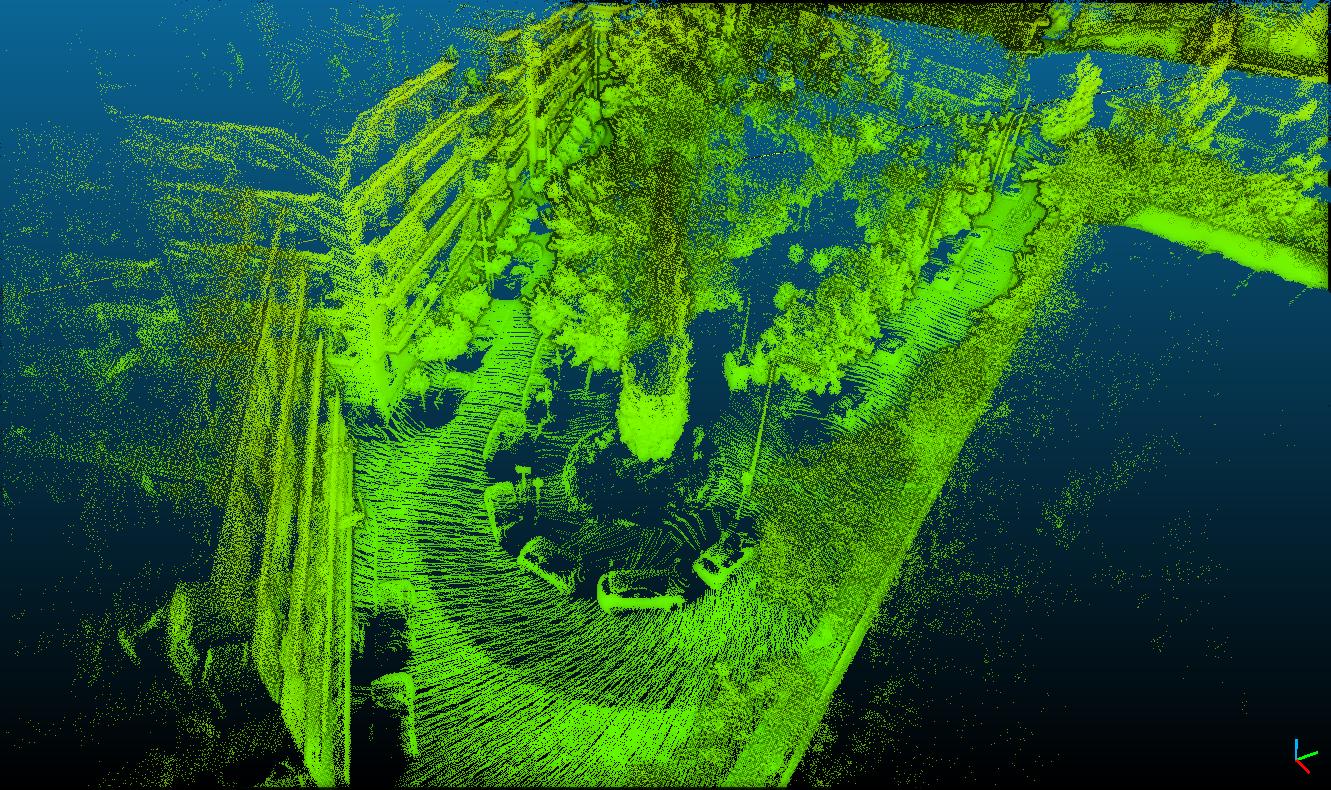
Here are some pictures after exporting at high resolution:
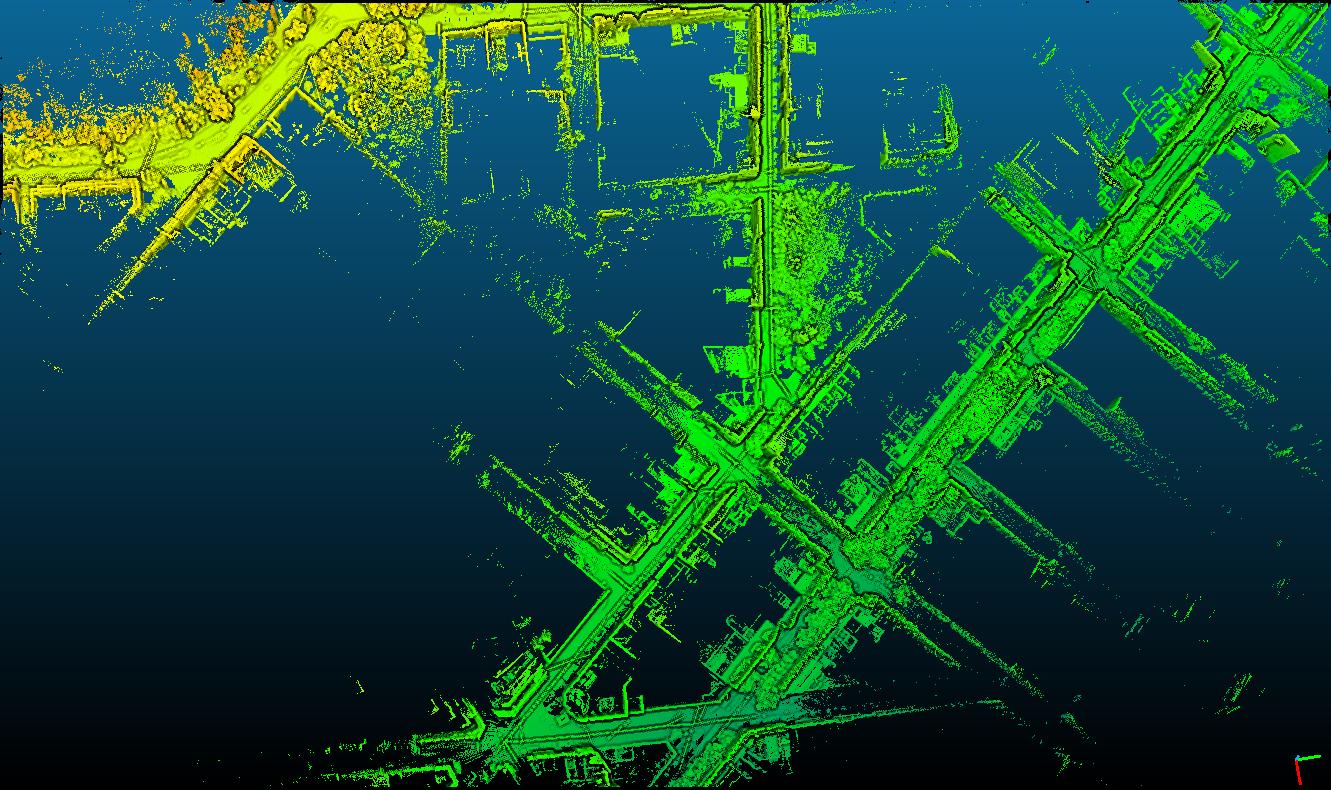

Note that I added a footprint option in this
commit to remove the car. In the same commit, I added a new implementation of voxel filter to use small voxel values on large maps, automatically split the map to avoid overflow in pcl::VoxelGrid filter.
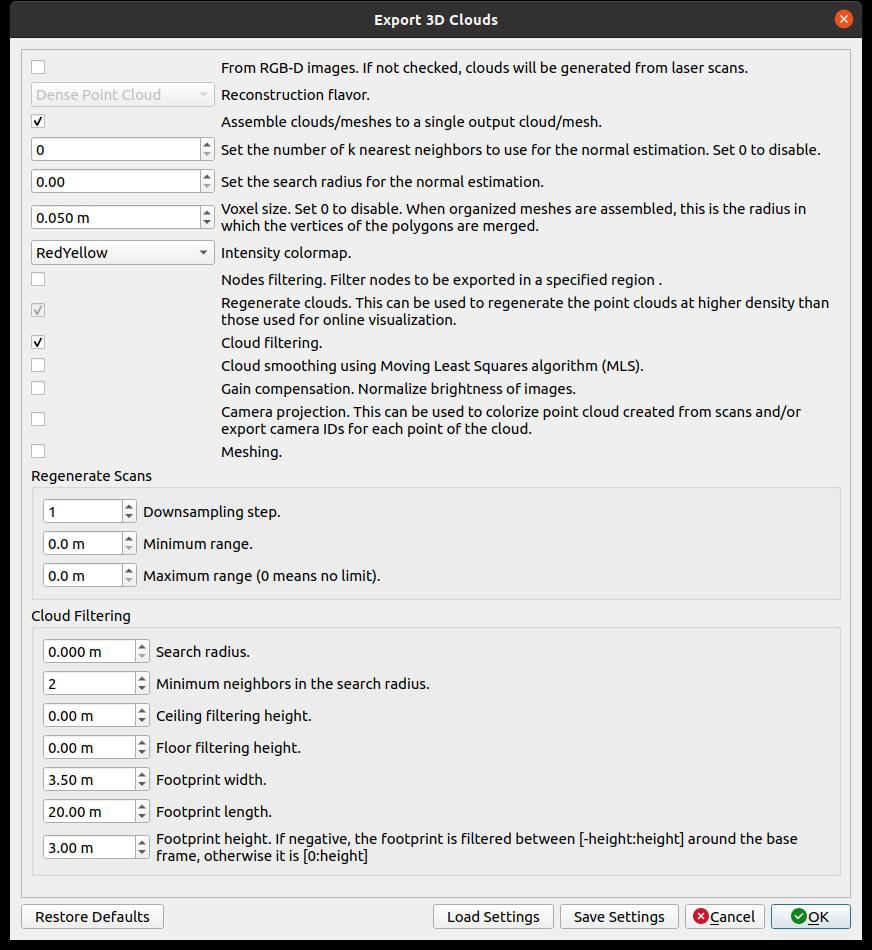
The footprint length is large enough to remove also the car that was following.
Final thoughts: Having an IMU that we know exactly its orientation against the velodyne would help. I wasn't sure of the imu orientation with the velodyne to use it. The lidar orientation is nice to get more data in vertical, but I think icp_odometry would work better if it was horizontal (to see the road both in front and back of the vehicle), this will help with orientation estimation. You could play with the voxel size (and subtract radius) and ScanKeyFrameThr to see if it can somewhat less drift. Actually, with IMU and gravity optimization, it would have helped with the pitch/roll error.
cheers,
Mathieu

