Hi,
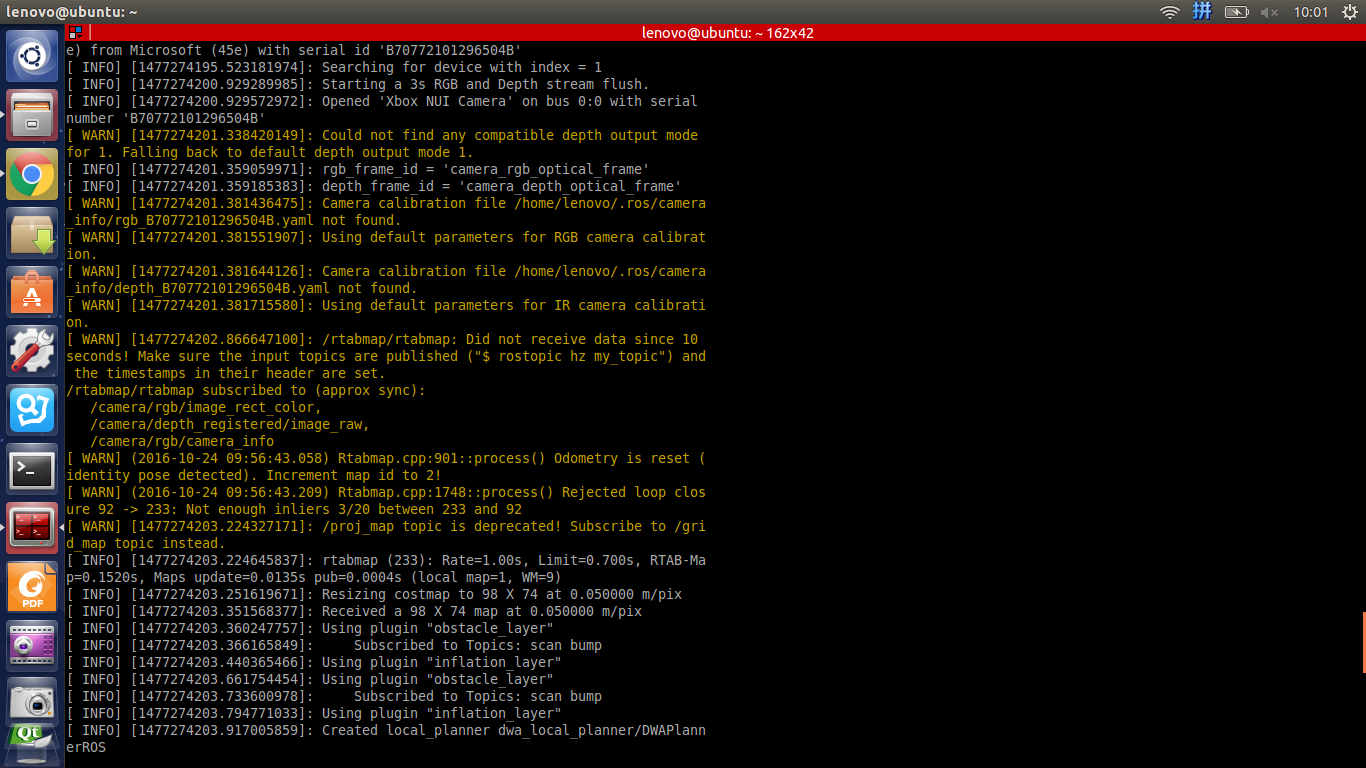
These warnings can be ignored, default parameters are used instead (which work in most cases). Those referring to rtabmap.cpp are more informative logs for convenience than actual warnings that should be addressed.
In versions over 0.11.8, /proj_map and /grid_map give exactly the same output. We will keep only /grid_map in the future, which means the general occupancy grid map output. To determine if it is constructed from laser scans or cloud projection, the parameters have been moved to RTAB-Map's library:
rosrun rtabmap_ros rtabmap --params | grep Grid/
Param: Grid/3D = "true" [A 3D occupancy grid is required if you want an Octomap. Set to false if you want only a 2D map, the cloud will be projected on xy plane. A 2D map can be still generated if checked, but it requires more memory and time to generate it. Ignored if laser scan is 2D and "Grid/FromDepth" is false.]
Param: Grid/3DGroundIsObstacle = "false" [[Grid/3D=true] Ground is an obstacle. Use this only if you want an Octomap with ground identified as an obstacle (e.g., with an UAV).]
Param: Grid/CellSize = "0.05" [Resolution of the occupancy grid.]
Param: Grid/ClusterRadius = "0.1" [[Grid/NormalsSegmentation=true] Cluster maximum radius.]
Param: Grid/DepthDecimation = "4" [[Grid/DepthDecimation=true] Decimation of the depth image before creating cloud.]
Param: Grid/DepthMax = "4.0" [[Grid/DepthDecimation=true] Maximum cloud's depth from sensor. 0=inf.]
Param: Grid/DepthMin = "0.0" [[Grid/DepthDecimation=true] Minimum cloud's depth from sensor.]
Param: Grid/DepthRoiRatios = "0.0 0.0 0.0 0.0" [[Grid/DepthDecimation=true] Region of interest ratios [left, right, top, bottom].]
Param: Grid/FlatObstacleDetected = "true" [[Grid/NormalsSegmentation=true] Flat obstacles detected.]
Param: Grid/FootprintHeight = "0.0" [Footprint height used to filter points over the footprint of the robot. Footprint length and width should be set.]
Param: Grid/FootprintLength = "0.0" [Footprint length used to filter points over the footprint of the robot.]
Param: Grid/FootprintWidth = "0.0" [Footprint width used to filter points over the footprint of the robot. Footprint length should be set.]
Param: Grid/FromDepth = "true" [Create occupancy grid from depth image(s), otherwise it is created from laser scan.]
Param: Grid/MapFrameProjection = "false" [Projection in map frame. On a 3D terrain and a fixed local camera transform (the cloud is created relative to ground), you may want to disable this to do the projection in robot frame instead.]
Param: Grid/MaxGroundAngle = "45" [[Grid/NormalsSegmentation=true] Maximum angle (degrees) between point's normal to ground's normal to label it as ground. Points with higher angle difference are considered as obstacles.]
Param: Grid/MaxGroundHeight = "0.0" [Maximum ground height (0=disabled). Should be set if "Grid/NormalsSegmentation" is true.]
Param: Grid/MaxObstacleHeight = "0.0" [Maximum obstacles height (0=disabled).]
Param: Grid/MinClusterSize = "10" [[Grid/NormalsSegmentation=true] Minimum cluster size to project the points.]
Param: Grid/MinGroundHeight = "0.0" [Minimum ground height (0=disabled).]
Param: Grid/NoiseFilteringMinNeighbors = "5" [Noise filtering minimum neighbors.]
Param: Grid/NoiseFilteringRadius = "0.0" [Noise filtering radius (0=disabled). Done after segmentation.]
Param: Grid/NormalK = "10" [[Grid/NormalsSegmentation=true] K neighbors to compute normals.]
Param: Grid/NormalsSegmentation = "true" [Segment ground from obstacles using point normals, otherwise a fast passthrough is used.]
Param: Grid/Scan2dMaxFilledRange = "4.0" [Unknown space filled maximum range. If 0, the laser scan maximum range is used.]
Param: Grid/Scan2dUnknownSpaceFilled = "false" [Unknown space filled. Only used with 2D laser scans.]
Param: Grid/ScanDecimation = "1" [[Grid/DepthDecimation=false] Decimation of the laser scan before creating cloud.]
Note that for convenience, if subscribe_scan is true, /grid_map will be created from laser scans if "Grid/FromDepth" parameter is not explicitly set (i.e., "Grid/FromDepth" is set to false by default if subscribe_scan is true).
cheers