Hi Mathieu,
I updated RTAB to the latest version(I wanted to change some variables per your
recommendation).
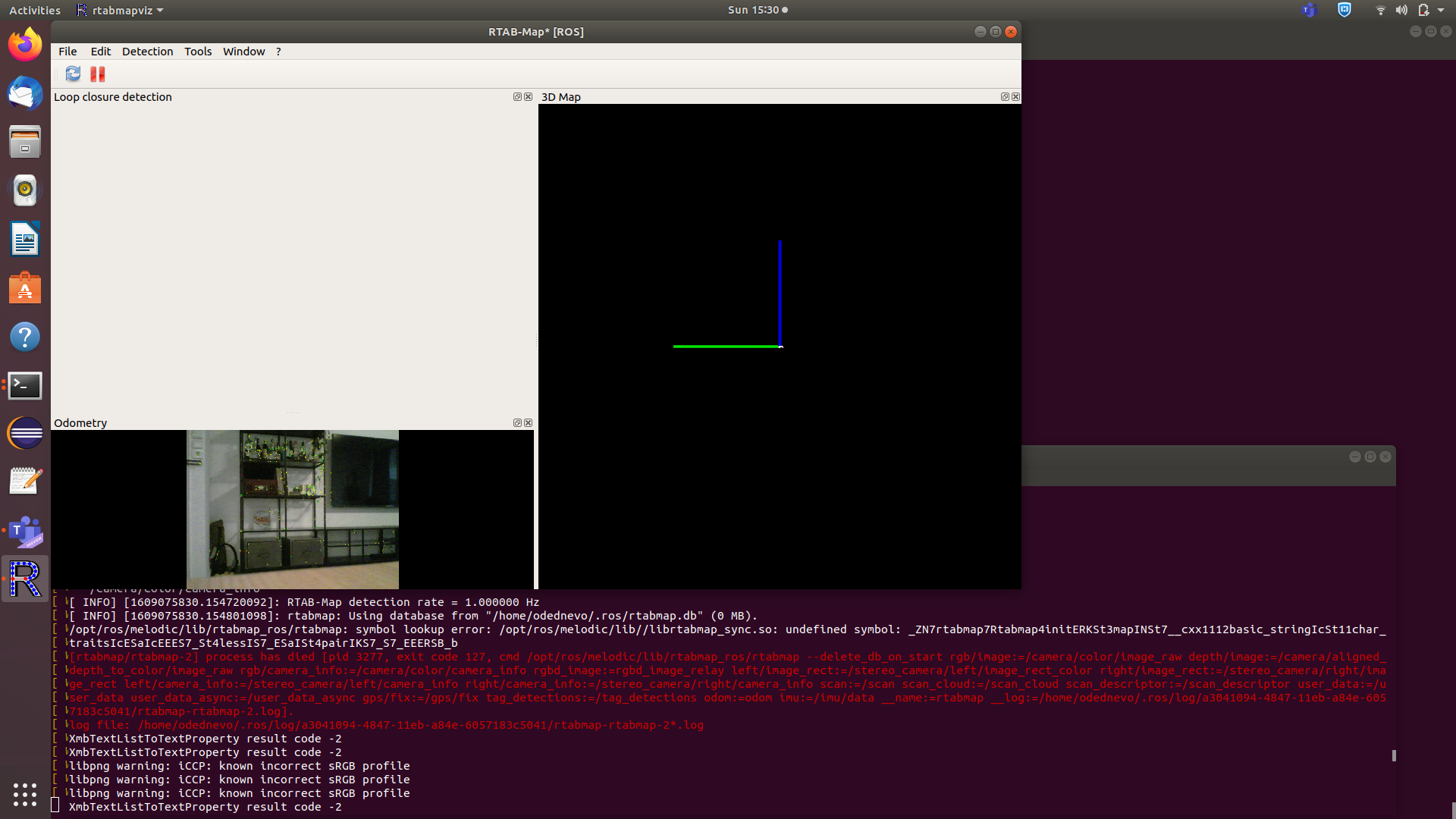
Since the update, I am not seeing any reconstruction and two windows are missing the the display.
In addition, when starting the application, I can see this error message:
/opt/ros/melodic/lib/rtabmap_ros/rtabmap: symbol lookup error: /opt/ros/melodic/lib//librtabmap_sync.so: undefined symbol: _ZN7rtabmap7Rtabmap4initERKSt3mapINSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEES7_St4lessIS7_ESaISt4pairIKS7_S7_EEERSB_b
[rtabmap/rtabmap-2] process has died [pid 3277, exit code 127, cmd /opt/ros/melodic/lib/rtabmap_ros/rtabmap --delete_db_on_start rgb/image:=/camera/color/image_raw depth/image:=/camera/aligned_depth_to_color/image_raw rgb/camera_info:=/camera/color/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections odom:=odom imu:=/imu/data __name:=rtabmap __log:=/home/odednevo/.ros/log/a3041094-4847-11eb-a84e-6057183c5041/rtabmap-rtabmap-2.log].
log file: /home/odednevo/.ros/log/a3041094-4847-11eb-a84e-6057183c5041/rtabmap-rtabmap-2*.log
Am I missing a default value the should be changed in the launch file?
anything else perhaps?
Best regards,
Tamir.

